



引言
动态预测是指预测动态系统未来行为的任务,设计学习控制系统演化的潜在动态,以对其未来状态做出准确的预测。高斯diffusion在正向过程中使用高斯噪声不同程度地破坏数据,然后通过反向过程对随机输入进行去噪以得到高度真实的样本。然而,在高维度上将噪声映射到真实数据十分具有挑战性,因此扩散模型的计算成本非常高。而且,扩散模型多用于静态图像,即使是能生成真实样本的video diffusion model也没有明确利用数据的时间性质来生成准确的预测。
本文贡献:
- 从扩散模型的角度研究概率时空预测。
- 提出了用于多步骤预测和长期视野的DYffusion框架,此框架通过时间归纳偏差来加速训练和降低内存要求。并且探讨了该方法的理论含义,DYffusion是学习动力系统解的隐式模型,cold sampling可以解释为它的欧拉方法解。
- 从预测性能和算力要求两个方面与conditional video diffusion models等先进的概率方法进行对比试验。结果表明,相较于高斯扩散模型,DYffusion提高了计算效率。
背景
问题提出
给定一组快照数据集(
由空间维度(例如纬度、经度和大气高度)和通道维度(例如速度、温度和湿度)组成,表示数据所在的空间),概率预测的任务是学习条件分布
,用l张过去的快照来预测接下来连续的h个快照。本文从单个初始条件开始进行预测任务,即学习
。
扩散过程
为了将扩散步骤的状态和的时间步区分开,我们用上标n来表示扩散步状态
。这个操作可以概括为,假设我们有一个退化算子D,以数据点
为输入,针对不同程度的退化比例输出
,
。通常,D加入带有递增方差的高斯噪声使得
。使用
参数化一个去噪网络,训练
来恢复
。扩散模型可以通过考虑
来根据输入动态进行条件设定。在动态预测中,可以训练扩散模型以最小化目标:
其中,是数据分布,
是范式,
是预测目标。
是集合
上的均匀分布,在实践中,可以训练
来使用score matching objective来预测加到数据中的高斯噪声。
DYffusion: DYnamics-Informed Diffusion Model(动力学信息扩散模型)
本文使用随机插值器网络替换退化算子D,使用确定的预测器网络
替换恢复网络
。从高层次上讲,我们的正向过程和反向过程模拟了数据中的时间动态。因此,扩散过程中的中间步可以用来在多步预测中进行预测。另外,与标准扩散模型中逆过程从白噪声不同,本文的逆过程从观测到的数据开始,所需的步骤更少,而且整个过程都受观测到的数据约束,可以提高预测的准确率。
时间插值作为前向过程
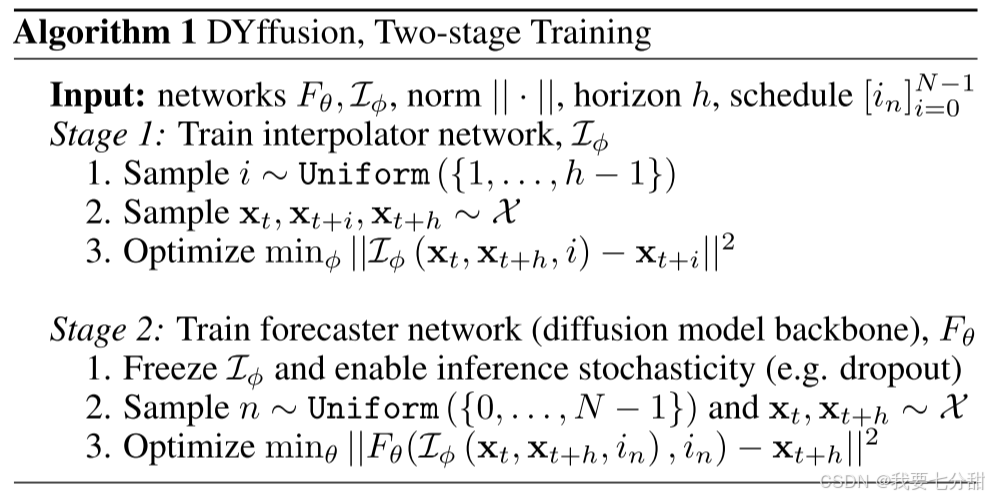
为了设置时间偏差,我们训练了一个时间条件网络在数据快照之间进行插值。具体来说就是,在范围h上,使用下述目标来训练
,使得
(让
学习到数据的动态变化规律):
使用可以得到比原始数据具有更高时间分辨率的数据。也就是说,时间输入可以是连续的,其中
,且(0,1)不在训练范围内。为了生成概率预测,插值器
在扩散模型和推理时间内产生随机输出至关重要。 我们在推理时使用蒙特卡罗 dropout 来实现这一点。
蒙特卡洛dropout(Monte Carlo Dropout)
蒙特卡罗dropout在训练阶段以传统dropout的方式工作,即随机丢弃部分神经元的输出,以减少神经元之间的共适应,从而防止过拟合。然而,在测试(或推理)阶段,蒙特卡罗dropout的用途发生了转变。它保持dropout层处于激活状态,并对同一个输入进行多次前向传播,每次前向传播都可能丢弃不同的神经元,从而产生多个不同的预测结果。这些预测结果的分布可以用来估计模型的不确定性。
预测作为逆过程
在第二步中,我们训练一个预测网络来预测
使得
,其中
,S表示扩散步骤映射到时间插值步骤的时间表。在随机性推理过程中,插值网络
保持不变,
表示随机丢弃的权重。目标函数如下:
为了使学习到初始条件,我们定义
。在最简单的情况下,预测网络被所有可能的时间步长监督,这些时间步长由训练数据的时间分辨率给出。也就是,
,
。一般情况下,插值时间步应该满足:当
时,
。鉴于我们的预测器和去噪网络在扩散模型中的等效作用,我们也将它们称为扩散主干。这意味着预测网络不仅可以用于预测未来或缺失的数据,还可以像扩散模型中的去噪网络一样,逐步去除噪声以恢复数据。值得注意的是,扩散骨干的时间条件是基于
而不是n,因此在训练或推理过程中可以选择任何diffusion-dynamics schedule。这意味着预测网络可以灵活地适应不同的时间尺度或数据特性,甚至可以对未见过的时间步进行预测。

由于在第二阶段中保持不变,因此在顺序采样中
的准确率可能会降低。为了解决这个问题,当n+1<N时,我们引入了一部步look-head损失项
,并使两个损失项的权重相等。除此之外,提供初始为干净或噪声形式的
作为预测网络的额外输入有助于改善性能。
下面时这两个阶段的训练算法:
采样
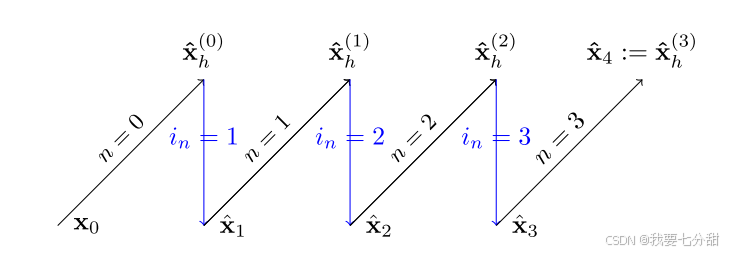
综上所述,我们可以将DYffusion的生成过程写为:
其中分别对应于初始条件和中间步骤的预测。在公式中,我们反转了扩散步骤的索引以与数据的时间索引保持一致,即当n=0时反向过程开始(
),当n=N指的是反向过程的最终输出(
)。与标准扩散模型中从噪声到数据的映射相反,我们的反向过程在时间上向前推进。因此,DYffusion所需的扩散步骤和数据较少。
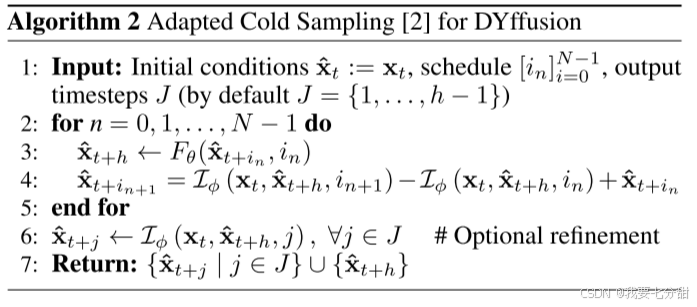
我们的插值阶段阶段不是扩散过程,但是预测阶段却遵循广义扩散模型的目标。这允许我们使用现有的扩散模型的采样方法进行推理,例如冷采样(Algorithm 2)。对最后一个时间步
进行预测,但是随着时间上接近t+h,它会迭代地改进这些预测。这类似于标准扩散模型中“干净”数据的迭代去噪。这体现在Algorithm 2的第六行中,
的最终预测值可用于微调中间预测或者增加预测的时间分辨率。如下图所示,在我们的方法中,插值和预测是交替进行的。
内存占用率
DYffusion只需要训练和
,第一阶段还要训练
,所以无论h如何变化,内存占用都保持恒定。相反,包括视频扩散模型在内的直接多步预测模型需要
来计算损失。这意味着这些模型必须将h + 1个时间步长的数据放入内存中。因此,许多算法仅限于预测少量的帧。例如,由于GPU内存限制,MCVD最多只能训练5个视频帧。
反向过程的ODE
DYffusion可以理解为通过“扩散过程”来模拟动态,类似于隐式模型。这种角度有助于解释DYffusion优越的预测能力,因为它学习模拟物理动力系统。训练
和
来构造一个微分方程,隐式地模拟
的解。
令s为时间变量,DYffusion的动态变化可定义为:
给定初始状态为,在训练过程中,我们尝试求:
当进行离散预测时,预测过程就等价于上式。采样表可以看作ODE求解器中的步长。因此可以在推理过程中灵活地选择采样表,因为他们是相同的ODE离散化。冷采样是与欧拉方法最接近的采样算法。
把DYffusion看作一个隐式模型强调了其动态本质且解释了DYffusion和DDIM的关系。DDIM可以看作一个从随机图像到干净图像的动态噪声去除模型。DYffusion可以看作一个从动态系统的当前步到未来步
的隐式求解模型。


















 2028
2028

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









