






1.坐标转换关系
mavros中的坐标系是东北天(前左上)
setpoint_velocity中发出的期望速度的坐标系是东北天
local_position中获取的位置信息是东北天下的(初始机体坐标系)
px4中的坐标系是北东地(前右下)
在拒止环境内集群无人机进行飞行任务时需要统一的坐标系,即以拒止环境右下角为原点建系(前左上),在此基础上给出的每架无人机的期望位置,再通过偏移量offset和PID给出每架的期望速度,此时的速度是无人机发惯系下的速度,因此在计算过程中需要进行发惯系到东北天的坐标转换,坐标转换的公式如下:
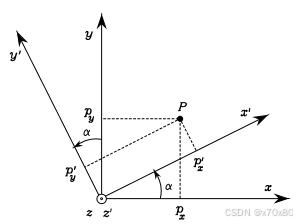
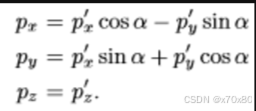
其中需要注意的是由于后续的飞行过程中yaw值在会发生改变,所以需要记录初始的yaw值以计算坐标转换中的三角函数值。
注:实际中的建系方式是通过无人机摆放与拒止环境x方向一致,然后通过x,y的偏移量(测量得到)计算拒止环境坐标系和每架飞机发惯系的位置关系。
2. px4 v14.4中的地面站参数修改
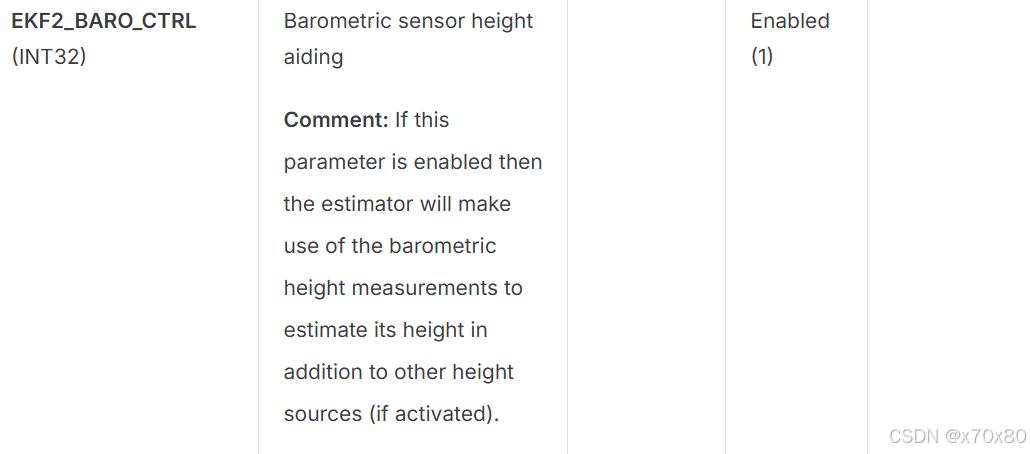
ekf2_rng_ctrl、ekf2_hgt_ctrl、ekf2_baro_ctrl分别对应激光、气压计和光流的启用,参数可以设置为0,1,2。
0---不启用;1---视情况而定启用;2---启用
本次比赛使用的光流型号是MTF-01,波特率为115200,另外需要检查对应端口号,将MAV_1_config修改成对应端口号(MAV_0_config对应的是数传端口号)
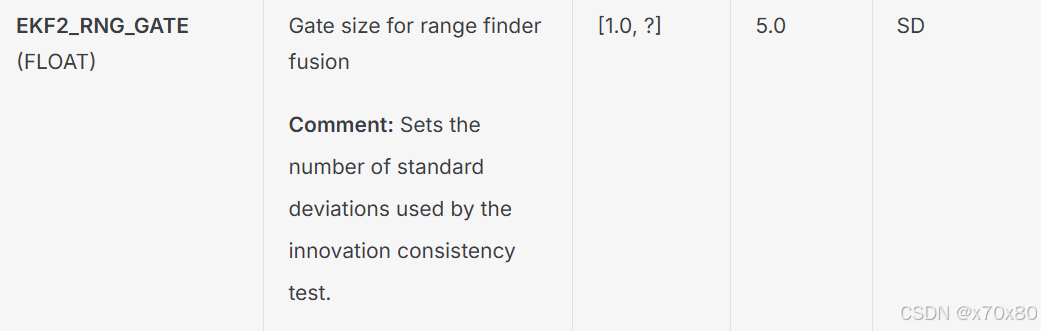
修改ekf2_rng_cate可以修改px4可收到的激光最大值,默认值是5m。
ekf_of_ctrl要设置为1,此时position和offboard模式下才能被RC解锁,当ekf_of_ctrl设置为2时只有stabilized能够解锁。

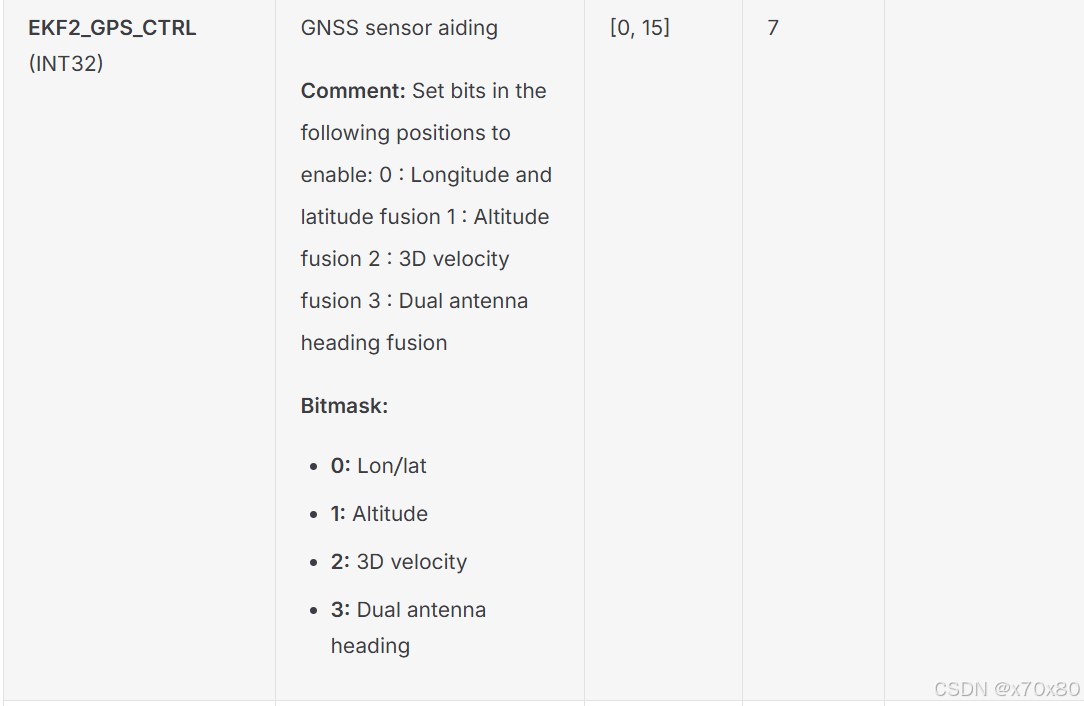
ekf2_gps_ctrl设置为0时关闭,设置值为bitmask掩码,第0位代表经纬度值,第1位代表高度值...7则代表111,即代表有经纬度、高度和速度信息。
另外,在高版本的QGC(eg:4.4.1)中在校准磁罗盘时可以看到飞控中的磁罗盘和GPS中的磁罗盘中的安装角度差,px4可自动修正角度差。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









