




Diffusion Model 原理剖析
原理剖析1
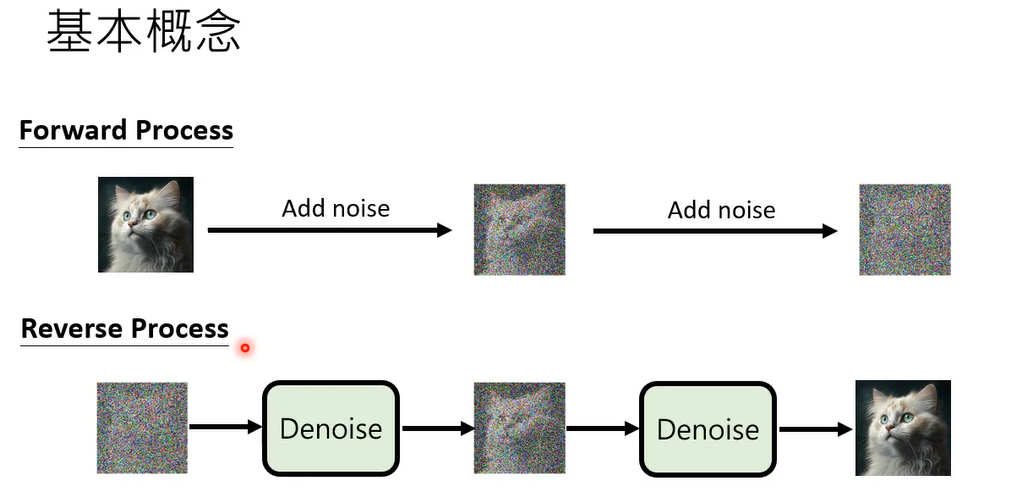
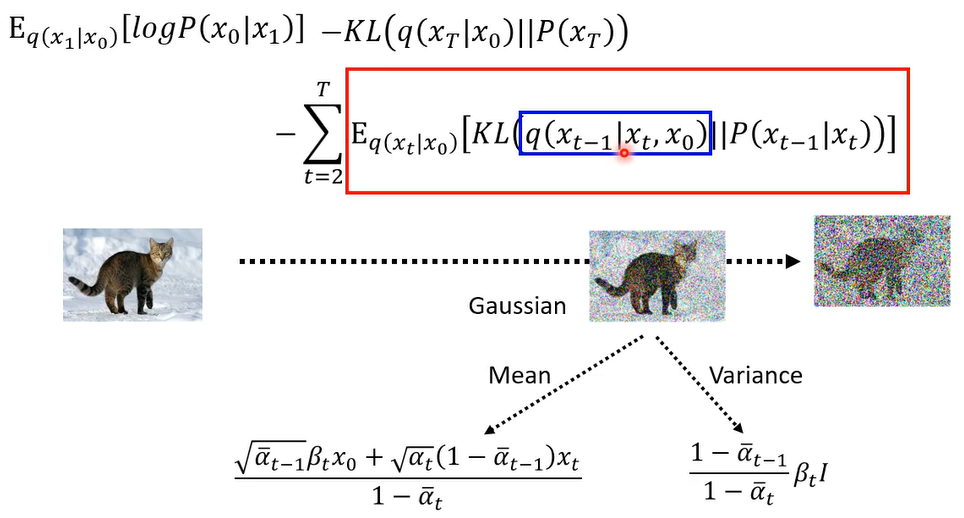
好那diffusion model的概念,那我们两周前讲过了浅谈图像生成模型 Diffusion Model 原理,其实非常的直观,而且有一个forward process,把这个forward pases就是把noise加到image里面去
,直到你看不出来原来的图长什么样子,那有一个reverse process,这个reverse process呢就是做denoise,你先给他一个全部都是noise的image,那每次denoise的过程中,这个图像都会浮现一点点出来,直到最后完整的图像被产生出来,所以diffusion的概念就是这个样子
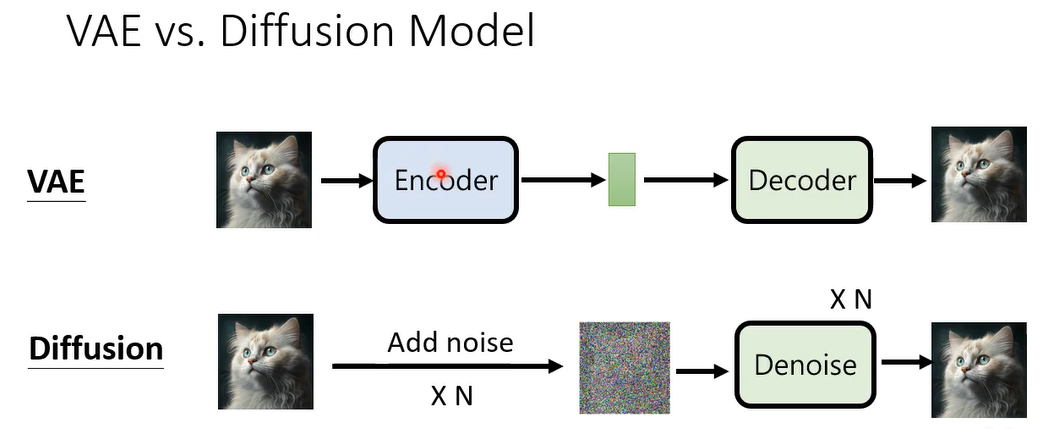
Diffusion model 和VAE非常的像,vae一就是先有一个encoder,把image呢变成latent representation,然后再一个decoder,把这个latent representation还原回image。那diffusion model呢它就你可以想成加noise的过程,其实就是在做encoder,只是这个encoder不是一个neural network,不是learn出来的,这个noise加进去的process是已经固定好的,他不需要学习,是人设计的,那你透过加noise的过程加n次noise,把一张image变成一个只有杂讯的东西,完全看不出来它是什么,那这个只有杂讯的image,就相当于v a e里面的latent representation,然后dnoise的过程就相当于vae里面的decoder,把都是杂讯的图,还原成原来的图啊,这个是diffusion model跟v a e他们的关联
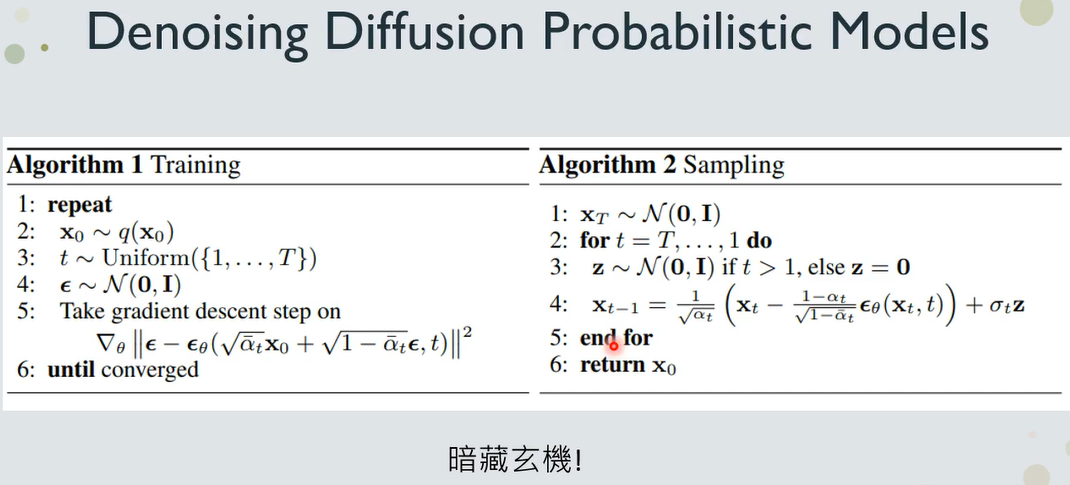
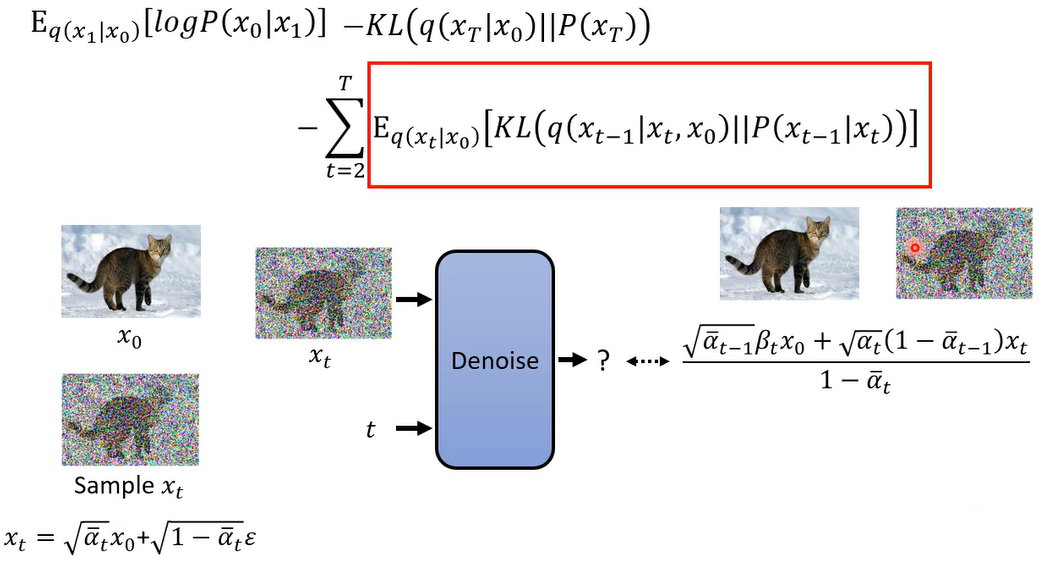
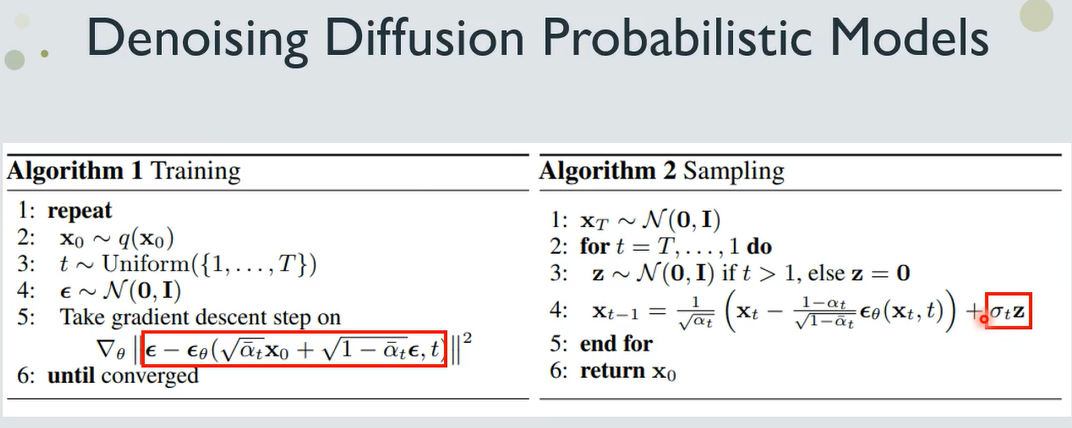
那上周的留了一个伏笔告诉你说,其实diffusion model的演算法非常的简单,在DDPM这篇paper的原始论文里面呢,其实就是这样,两张图就是diffusion model演算法的全部,但是两周前留了一个伏笔,说这个演算法里面呢其实暗藏玄机,如果你仔细读一下这个演算法,你会发现,似乎跟我们两周前讲的概念,有一些不一样的地方,那我们就先来看看这个演算法里面在做什么好,先来看训练的演算法啊
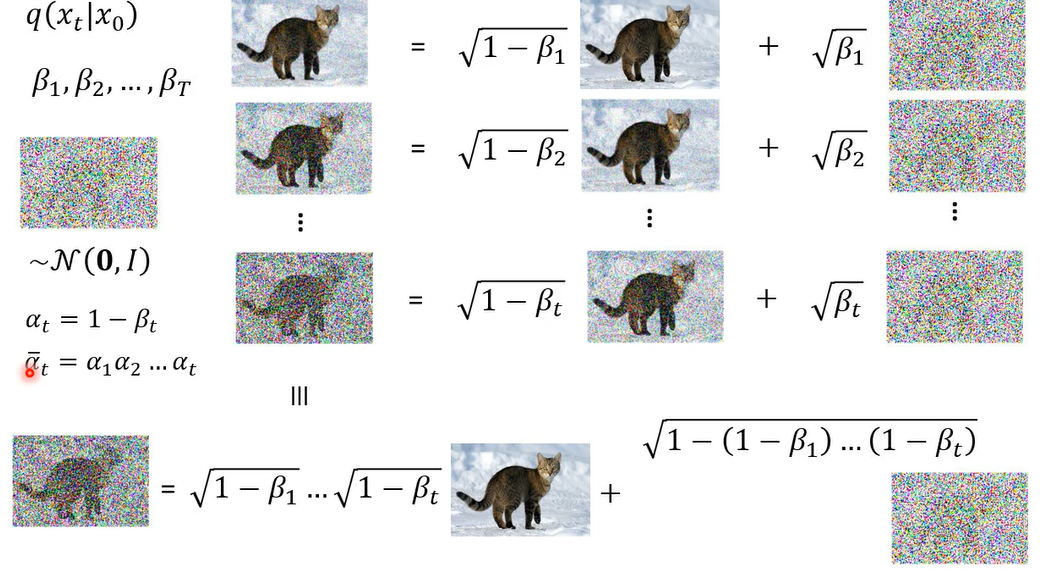
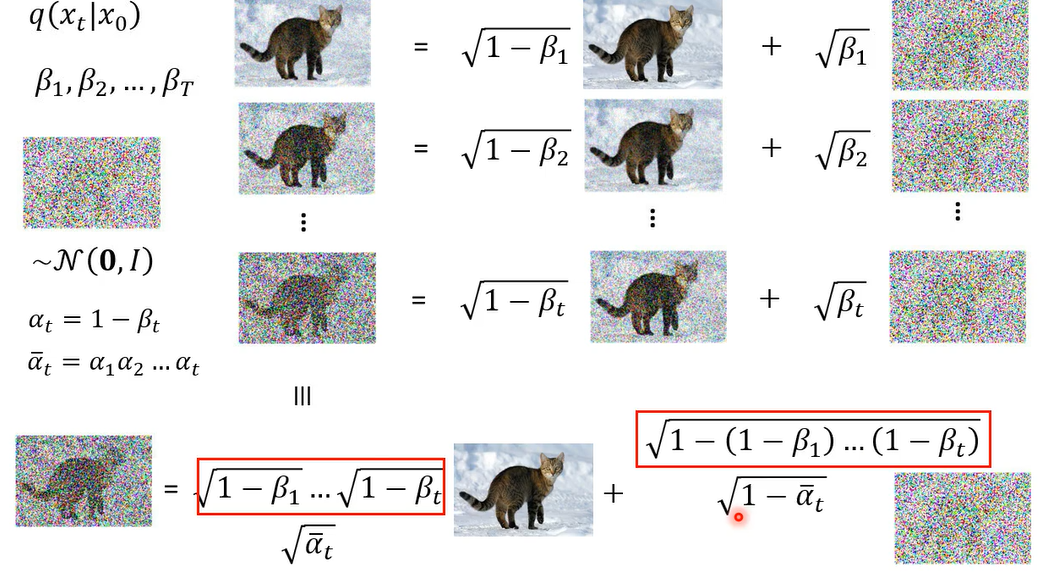
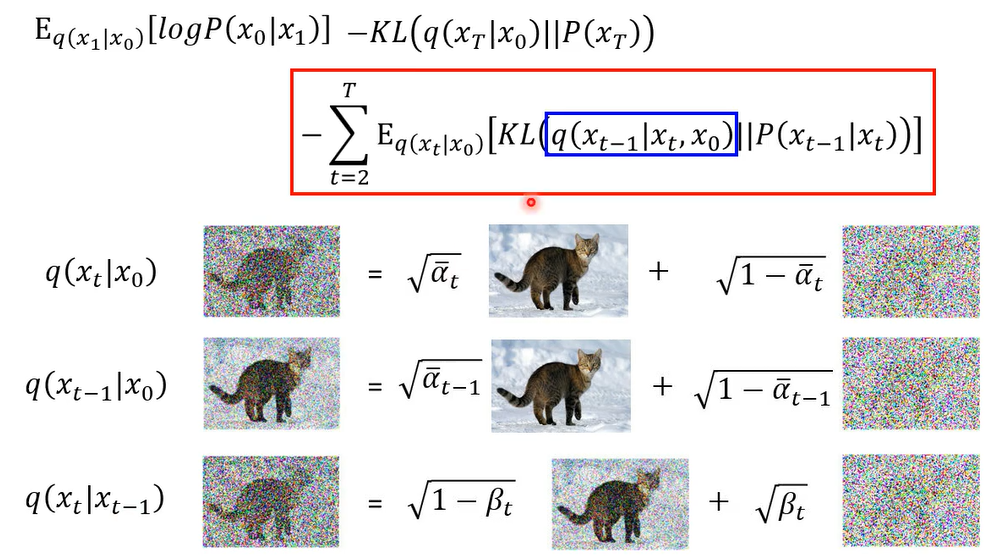
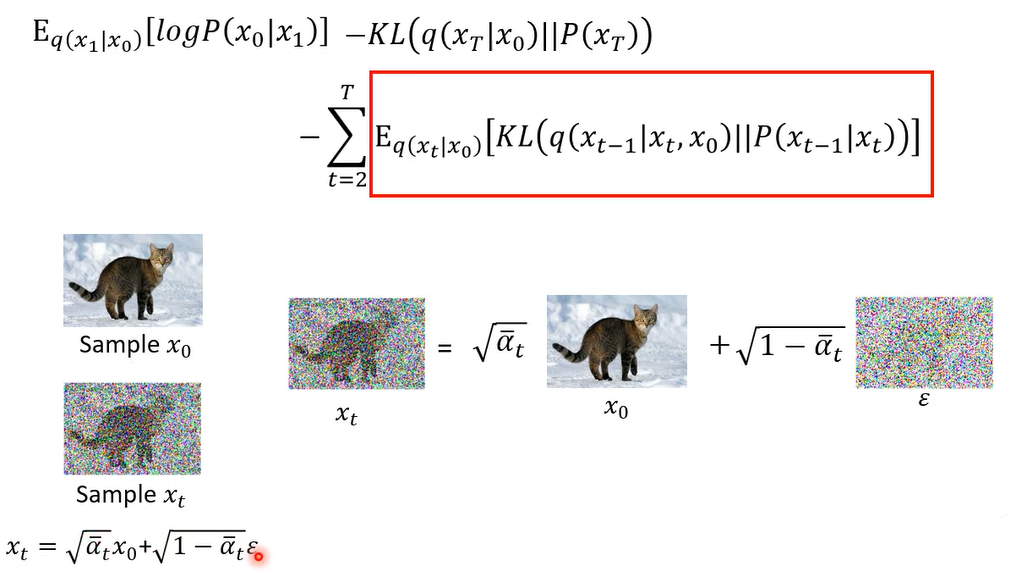
在训练的演算法里面要做的事情是什么呢,而这个第一行是repeat,就以你一直做第二行到第五行的这些事情,直到converge位置好,那这个呃第二行做的事情是什么呢,第二行做的事情是说我们先要simple一张image,叫做 x 0 x_0 x0,在diffusion model的这个文件上啊,通常把x0 当做是干净的图,就是你要呃就是真正的图也要生成的图哦,所以x0 代表的是干净的图,也就是你从你收集到的影像的资料库里面,抽一张图出来啊,就是x0就是第二行做的事情,而第三行呢是simple的t哦,从一到大t这个数字间simple一个整数出来,那这个大t套会设一个比较大的数字,比如说1000哦,所以从1~1000里面simple一个数值出来,比如说968啊,然后这个然后接下来呢你会有个ε,这个ε呢是从一个normal distribution里面simple出来的,那这个normal distribution呢它的mean是0,那他的这个variance,每一个dimension variance呢都固定是1啊,就从这个normal distribution里面simple出一个ε出来,那这个ε它的这个大小呢会跟image是一样大的,不过它里面全部都是杂讯,所以你看不到任何有意义的图
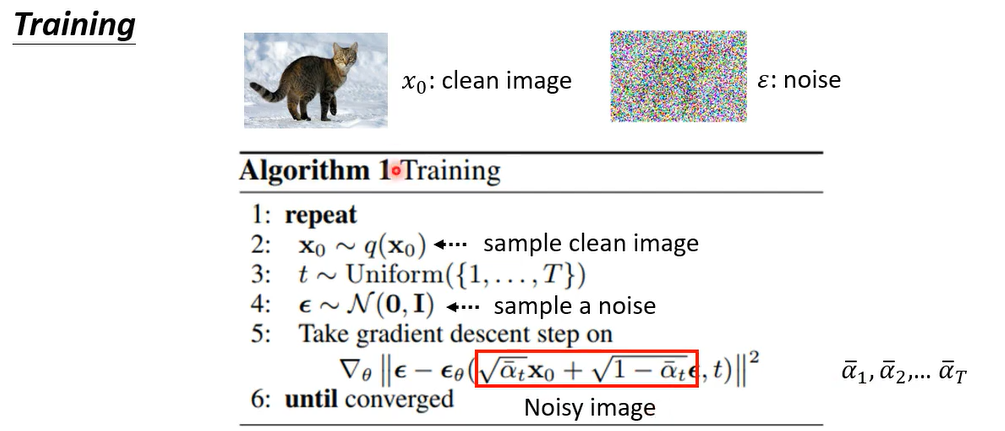
那接下来呢第五行是比较复杂的,我们先来看第五行,红色框框里面做的事情,红色框框里面做的事情是把x0跟ε做Weighted average,,weight 是什么呢,这个weight呢是事先定好的哦,从阿尔法1到阿尔法t吧,我们事先定好了一组位,从阿尔法1一直到阿尔法T,那你把x0 和ε做Weighted sum,你得到的就是一个有杂讯的图。x0 跟ε用某种比例混合起来以后呢得到的就是一张有杂讯的图.
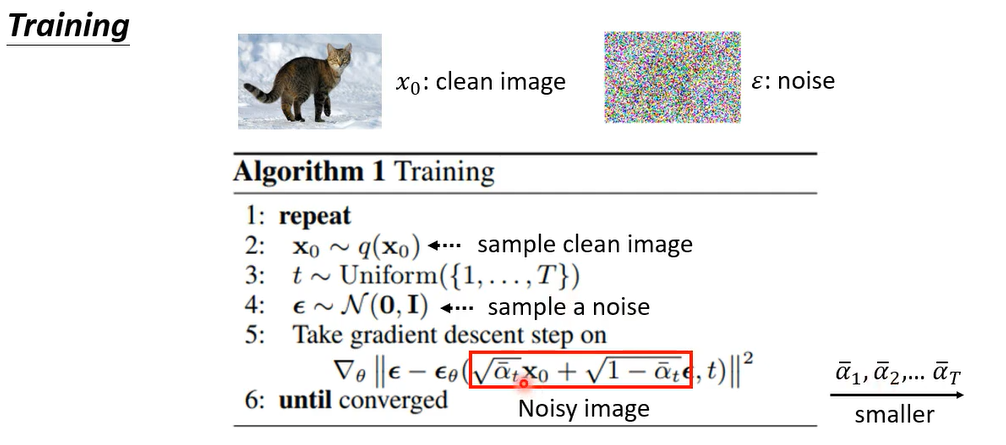
阿尔法1到阿尔法t的设计通常是由大到小,所以所以今天如果你simple到了这个t越大的话,那就代表阿尔法越小,那阿尔法越小意味着什么,意味着原来的图x0 占的比例越少,那你的noise 呢占的比例越多哦,所以这个t simple到的越大,代表说我们noise加的越凶狠,加的越多,那我们就得到了一张noise的image,接下来做的事情是什么呢,这边有一个看起有点复杂的式子
ϵ
θ
\epsilon_{\theta}
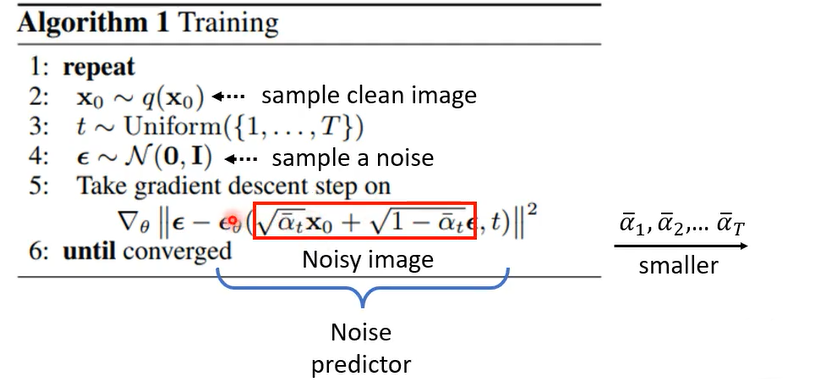
ϵθ是一个函数,这个function的输入是Noise image和t,这个函数就是Noise predictor,这个noise predict ,the network呢就是吃一张noisy的image
吃一个simple到的数值t,然后呢他就产生一个noise
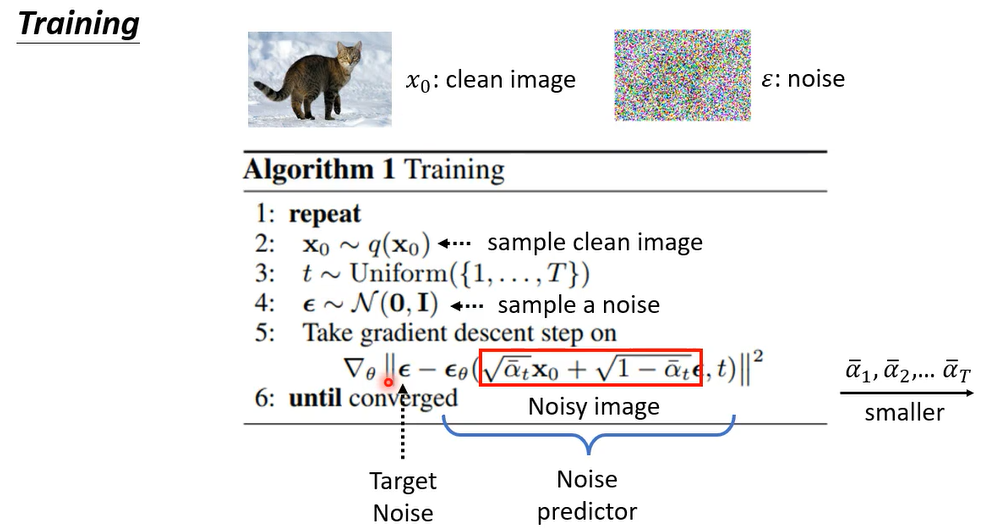
那我们现在学习的目标是什么呢,他的意思就是说我们这个noise predictor,他要output的目标是什么,他的ground truth是什么,它的正确答案是什么,正确答案就是你当初sample出来的那个noise,你当初sample出来,跟clean image混在一起的那个noise 了。画个图可能更加清楚,我们先准备好一排数值阿尔法,阿尔法1到阿尔法T啊,然后呢从你的资料库里面抽一张图x0 出来
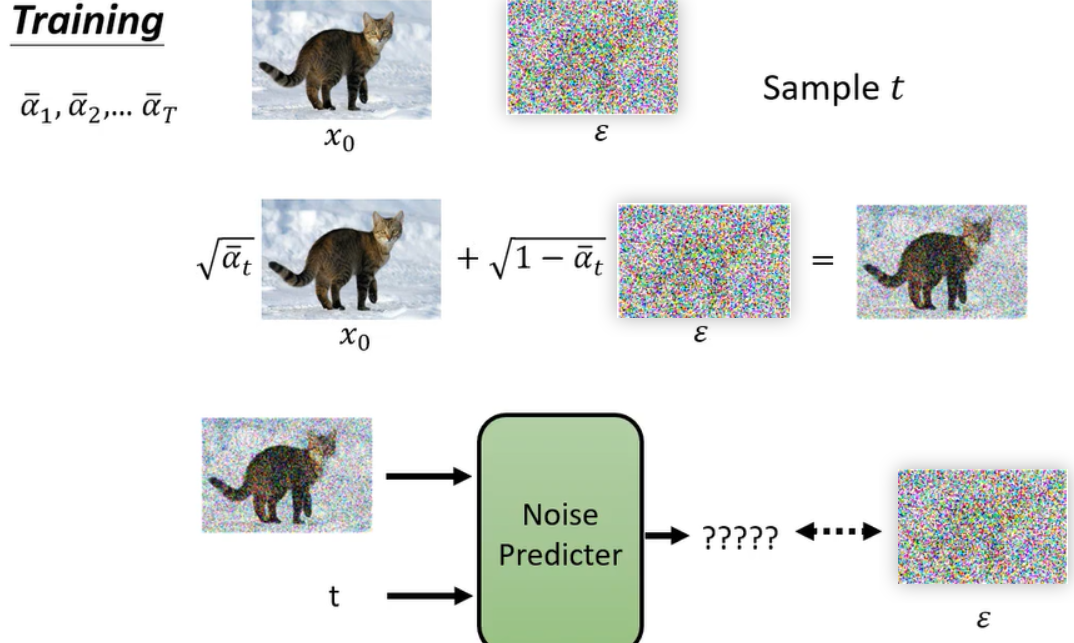
那我们就是simple一个noise出来,然后呢simple一个整数提出来。然后我们就把我们simple到的干净的图成一个比例,加上噪音乘一个比例,而得到一个杂噪音的图。接下来呢你要训练noise predictor,他就是吃这个有噪音的图,混入噪音的图加上呢呃一个数值,一个整数,然后呢他要输出呢呃去预测呢,混入的噪音长什么样子啊,他要去预测混入的噪音长什么样,好在这个是实际上d d p m diffusion model,它的演算法真正做的事情
如果你在回忆起我们上次上课讲的东西,你会发现其实是有点不太一样啊,上次讲的是一个概念中的讲法
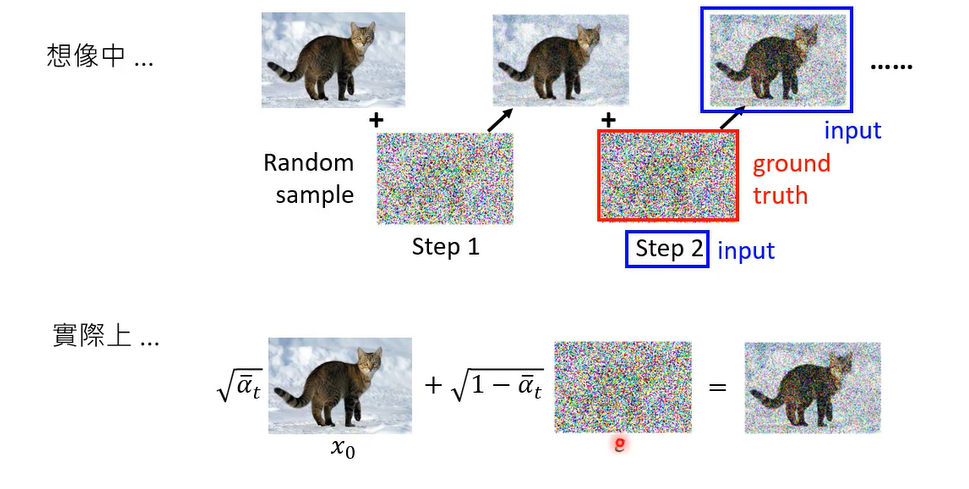
就是在我们的想象中呃,这个diffusion model的运作应该是这样子的,每次你有你有个最干净的image,加点噪音变得有点杂,再加多一点噪音变得有一点杂,然后你每一次训练你的noise predictor的时候,他是把有杂讯的image当做输入,然后呢再给它一个数值,然后他预测的是混入的这个杂讯,但是它还原的结果是要还把有杂讯的图还原成,有一点没有那么杂讯的图,但是它还是有杂讯的。
但是实际上实际上dd pm的演算法,做的事情是干净的图,直接混入一个噪音,那这个噪音呢透过 α t ˉ \bar{\alpha_t} αtˉ决定那个噪音的大小
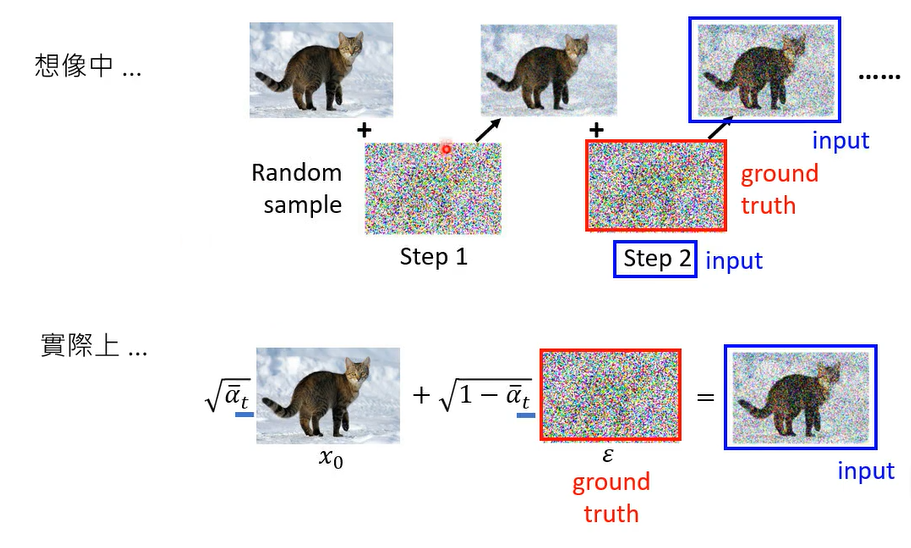
然后呢训练的时候呢,就是把有噪音的图跟t当做输入,直接预测混入的造诣,那你发现说实际上做的事情,跟我们想象中做的事情其实是有点不一样
在我们想象中,杂讯是一点一点加进去的,dnoise的时候也是把杂讯一点一点的抹去,但是实际上我们真正做的事情,杂讯并没有一步一步的加进去,并没有加多次杂讯,一次就把杂讯 ϵ \epsilon ϵ直接加进去,然后呢在denoise的时候,也是一次就要把 ϵ \epsilon ϵ denoise出来
为什么是这个样子,那等一下的数学推导非常的差,那等一下东西,如果你听不懂的话也无所谓,你就印记说哎d d p m其实就是这样子的,跟你想象的有一点不一样啊
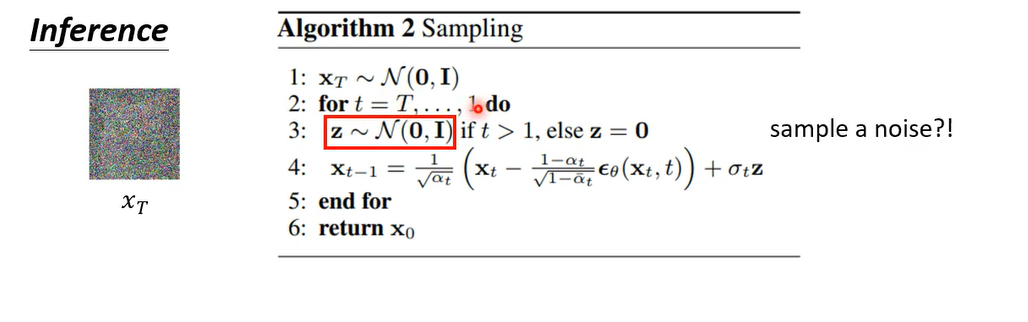
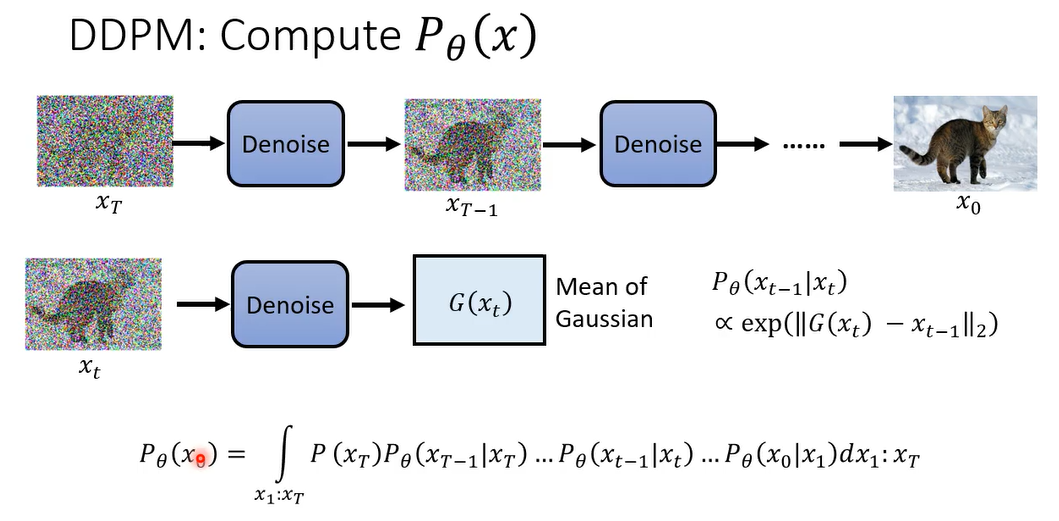
好那我们再来看看产生图的过程,产生图的过程是这个样子的,我们一开始呢先这个simple一个全部都是noise的图,这个叫做 X T X_T XT,那在diffusion model的这个文件里面,通常把 X T X_T XT代表一个纯粹都是杂讯的图,我们simple一个纯粹都是杂讯的图啊,接下来就开始做,接下来呢就开始跑这个reverse process,开始把图产生出来,那他总共要跑T次,所以这个t等于T到1
当你发现每次生图的时候,首先它都要先升一个noise出来,这边又再simple了一次noise,就这边已经sample过一次noise,得到x大t了,这边不知道为什么居然要再simple一次,得到z
下面这个式子做的事情是什么呢,这个式子做的事情是这样子,我们有xt啊,我们x t这个是在上一个步骤中,已经产生出来的图,那一开始t等于大t的时候,那这个xt就是一个纯粹的杂志,不过这边是iterative不断的循环的跑的,xt是上个步骤产生出来的图
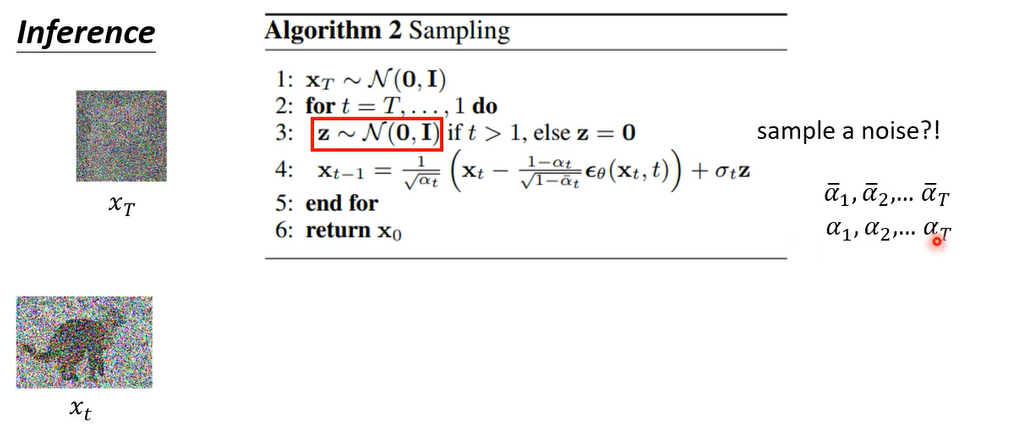
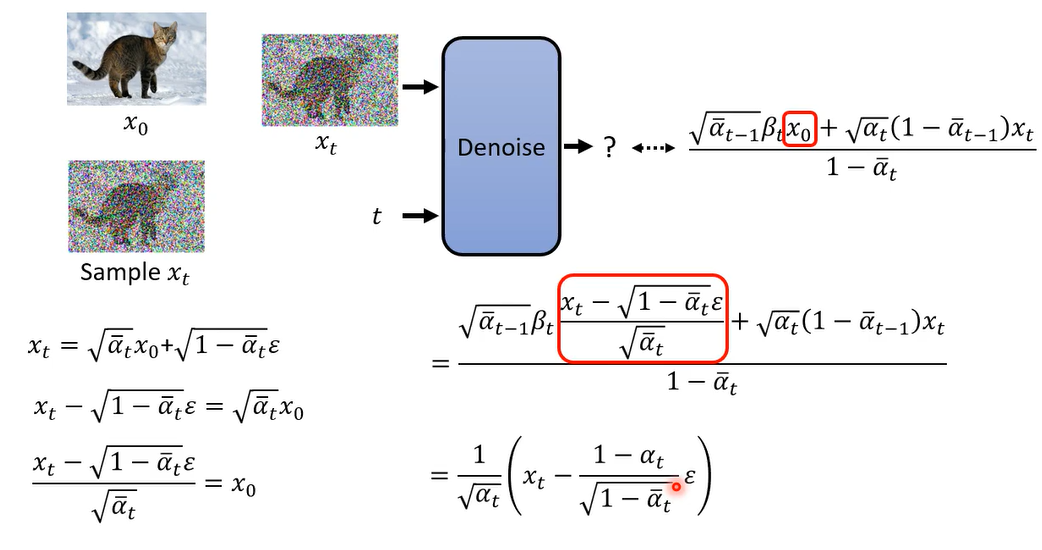
好把x t减掉,这边有个 ϵ θ \epsilon_{\theta} ϵθ( x t x_t xt, t)这个是什么,这个是dnoise的那个那个noise predictor啊,output出来的noise,乘上一减阿尔法t除以根号一减阿尔法t拔,然后乘上一除以根号阿尔法t,然后呢还要再加一个noise,这个noise前面有乘一个常数,叫做 σ t \sigma_t σt,然后得denoise的结果叫 x t − 1 x_{t-1} xt−1
那如果这个式子你看的有点模糊的话,以下就用图的方式来呈现它好,上一个iteration产生出来的图叫x t好,然后呢你要准备好两组那个呃数值的序列,阿尔法1到阿尔法t拔 ,还有阿尔法1到阿尔法t
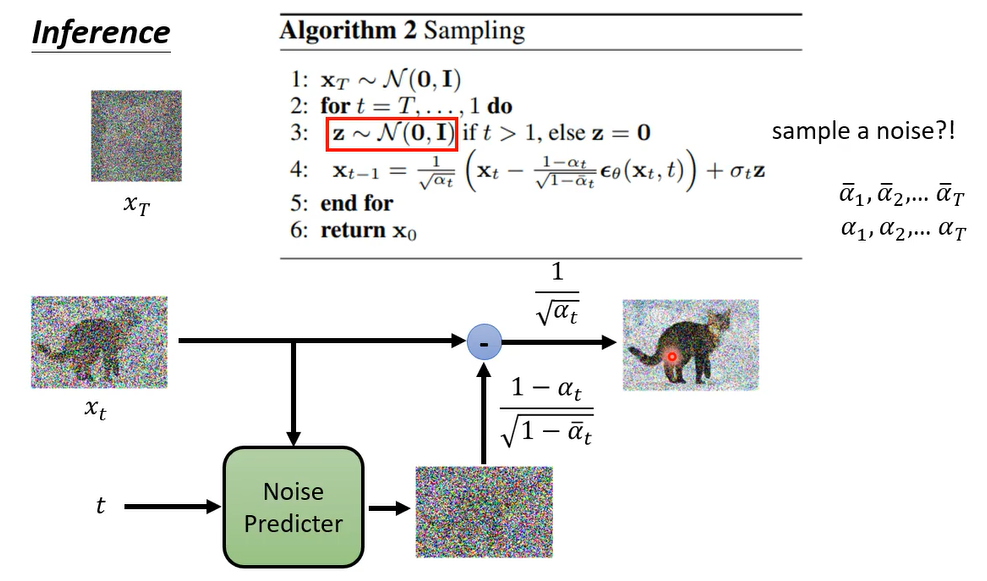
然后呢noise predictor 吃xt这张图当做输入,吃t当做输入产生一张图片,产生一个noise prediction的结果,它predict出一个noise出来,然后呢把这个noise呢减掉x t啊,把这个noise呢减掉x t,然后呢这个noise减之前呢,你要乘上一个呃常数,这个是一减阿尔法t除以根号,一减阿尔法t拔
那相减完之后呢,你要乘上这个一除以根号阿尔法t,但是这居然不是我们最终的结果,本来在我们的想象里面,我们就是把noise predict出来,然后把有杂讯的图解掉,杂讯就应该得到更干净的图,照理说应该就是这个样子就结束了。
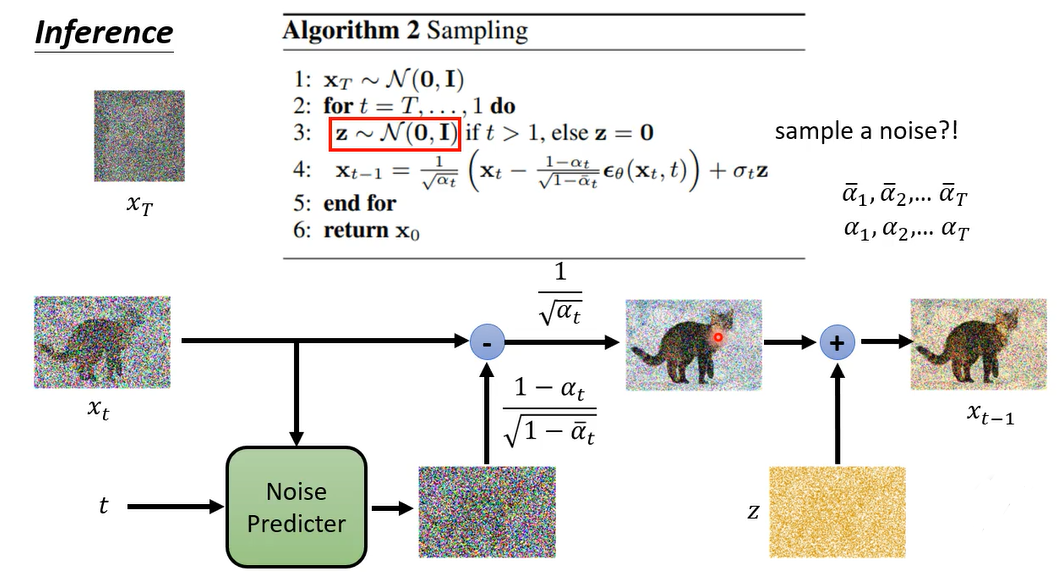
那这里有个奇怪的玄机,不知道为什么还要再simple一个杂讯,把这个杂讯再加到你的影像里面去,得到最终的输出,这个也是一个令人匪夷所思的操作
原理剖析2
这边呢要话说,从头我们要从影像生成模型,本质上共同的目标开始讲起,那影像生成模型本质上共同的目标是什么,它本质上共同的目标是在input的地方,你有一个简单的distribution,你知道怎么做,simple的distribution通常就是一个gaussian的distribution,那可能设成mean是0,然后每一个dimension variance是1。
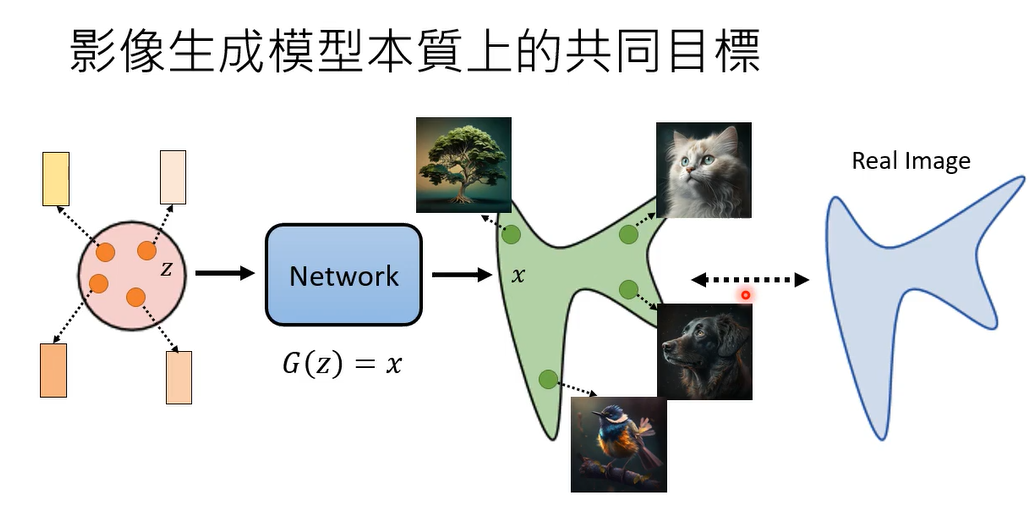
就这样一个简单的distribution,那从里面呢simple出一个东西出来,比如一个vector出来,然后把这个vector呢丢到一个network里面去,这个network我们用g来表示,它的输入是z啊,还有输出是x,那这个x呢就是一张图片,那我们每次呢从input这个简单的distribution sample,一个vector出来,simple一个vector出来,那通过这个network就变成一张图片,simple一个vector出来,to network就变成一张图片,就算是输入是一个非常简单的gaussian的distribution,通过这个network的转换,它输出会变成一堆图片,这些图片会组合成一个非常复杂的distribution,而我们期待的事情是我们找到一个network,这个network应该做到的事情是跟真正的图片的distribution,真正的图片所形成的distribution越接近越好,这个是影像生生成模型,本质上所有各种不同的方法都在奋斗的目标
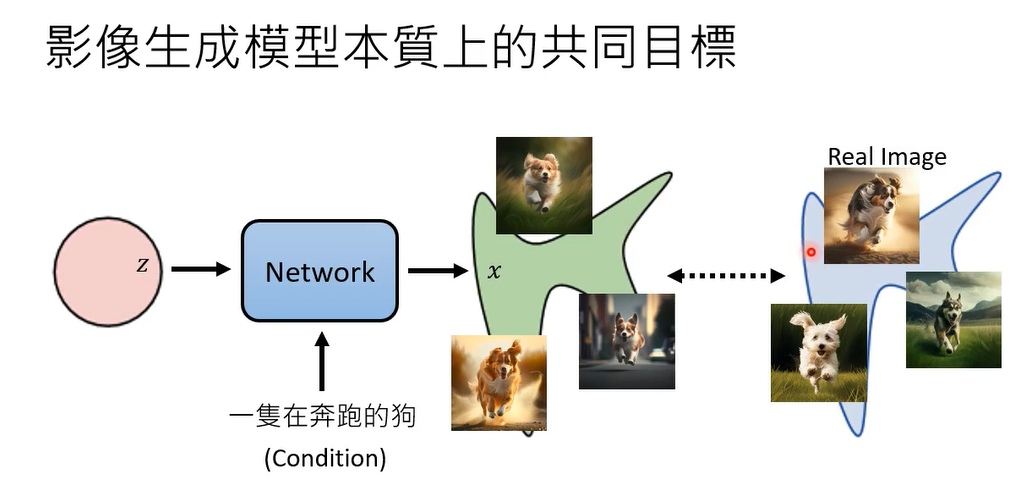
那我知道说今天做影像生成啊,也不是只有生成图而已,通常更常见的应用是直接给一段文字,叫你把图生出来,那但在原理上并跟我们刚才讲的影像生成模型,本质上共同的目标并没有什么不同,多加了一段文字,通过这段文字我们叫做condition,通常多加了condition以后,我们生成出来的是,根据这个condition所产生出来的图片,但是它仍然是一个distribution。
因为我们上次说过说,当你说一只正在奔跑的狗,虽然文字是一直在奔跑的狗,但是影像它可以千变万化,因为一张图片胜过千言万语,只拿一个句子是没办法描述一张图的,所以当你只输入一段文字,要机器生成出图片的时候,他的目标其实是产生一个distribution,产生所有各式各样在奔跑的动,那我们的目标呢一样是要让今天产生出来的distribution,跟真正的distribution越接近越好,所以当影像生成模型,有加上文字的conditions的时候,并没有什么本质上的理论上的差异啊,所以我们等一下再讲接下来的课程的时候,我们都假设没有这个condition,这样等一下的数学是更简洁一点,但是在实际应用的时候,有加上这个文字的condition,并不会影响你的演算法,并不会有太对你的演算法并不会有太多的影响
那我们刚才讲出我们的目标,就是希望这个network,它输入从某一个distribution sample出来的东西,它产生另外一个distribution,而它产生出来的distribution,应该跟我们一个目标的distribution越接近越好,但是什么叫做越接近越好呢,怎么衡量所谓的两个distribution越接近越好,这件事呢
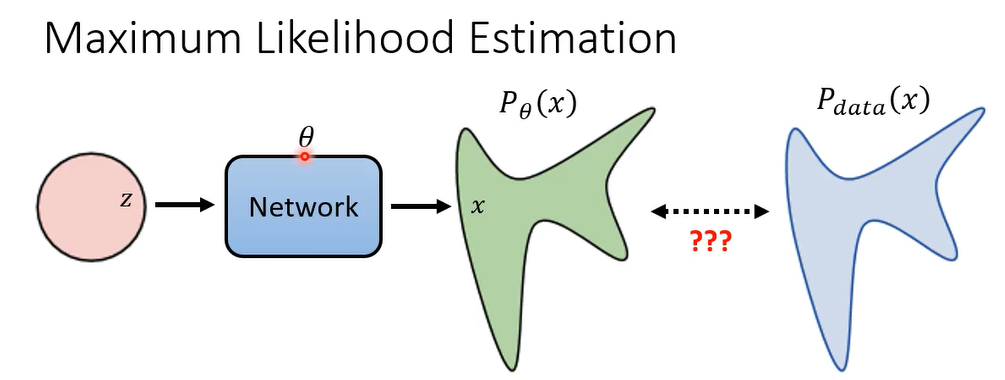
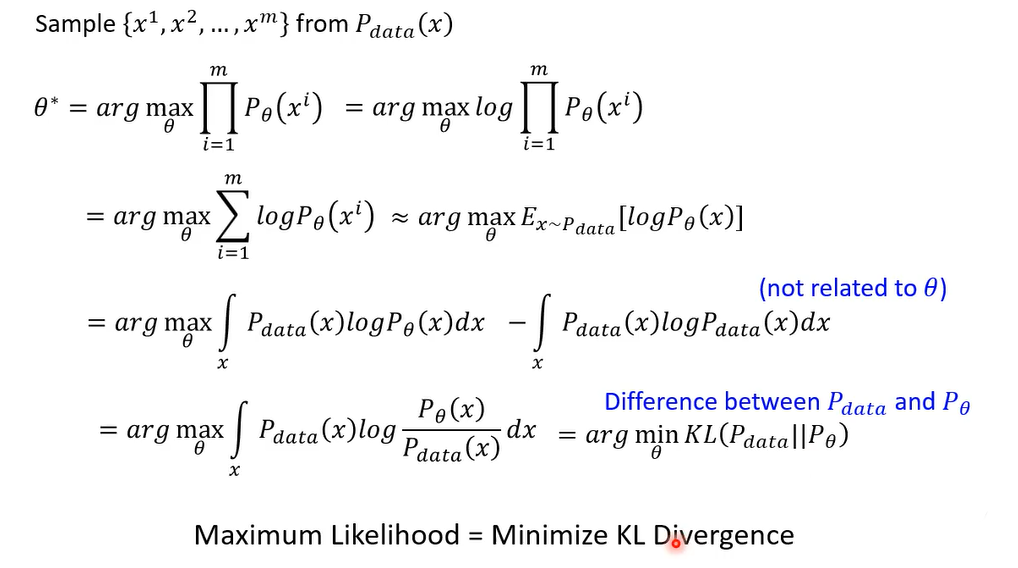
那多数的这个影像生成模型采取的都是呃,maximum likelihood estimation,什么叫maximum likelihood estimation呢,他的操作是这个样子,我们假设network呢它的参数我们用 θ \theta θ来表示,然后呢,这个根据 θ \theta θ这个network产生出来的这个distribution,我们用 P θ P_{\theta} Pθ来表示,真正的distribution我们用 P d a t a P_{data} Pdata来表示
首先我们从p data里面simple出一堆的image(其实就是你今天在训练模型的时候,你需要一些训练资料,那这些训练资料你要想办法找到,你可在网络上收集的,可能是你买来的,总之你收集到了一堆训练资料,那你收集训练资料,这个过程其实就是从全世界所有可能的图,也就是p data里面取样出一些image出来,取样一些图出来啊)就是x one到x m
那这边呢我们假设我们能够计算 P θ P_{\theta} Pθ,产生某一张图的几率,那这件事情实际上可能是做不到的,因为 P θ P_{\theta} Pθ的非常的复杂,它不是一个gaussian的distribution,它是一个非常非常复杂,你难以想象的distribution,那既然它是一个你难以想象的distribution,随便给你一张图,你可能是算不出这个图,根据这个distribution产生出来的几率的,但是没有关系,我们就是先假这我们可以做到这件事
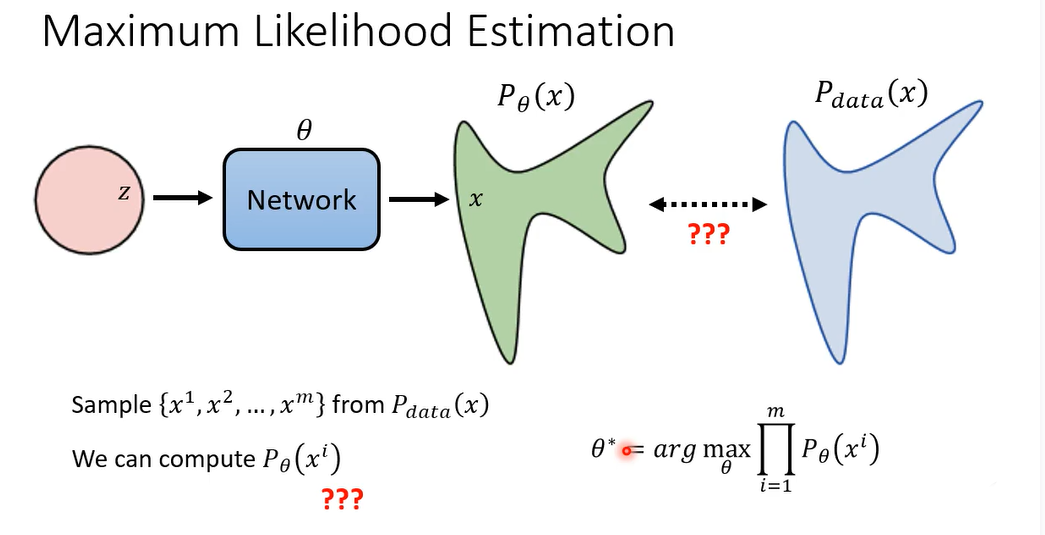
那接下来我们要找什么样的 θ \theta θ呢,我们要找的 θ \theta θ就是可以让我们simple到的这些图产生出来的几率最高的那个 θ \theta θ,那你的objective function,你要去maximize的目标是写成这个样子的,你要去找一组参数,这组参数可以让这个式子的值这最大,这个式子是什么,这个式子就是对你sample到的每一张图,你都拿 P θ P_{\theta} Pθ去算他的产生出来的几率,你把你simple到的图,x one到xm每一张都计算 P θ P_{\theta} Pθ产生它的几率,然后全部乘起来啊,你要找一个 θ {\theta} θ,让x one到xm产生出来的几率越大越好啊,这个可以让这个x one到x产生出来,几率最大的那个 θ {\theta} θ,我们叫做 θ ∗ {\theta}^{\ast} θ∗,就是我们今天学习的时候要找出来的结果,那其实不同的影像生成模型,他们用的都是这种maximum likelihood estimation.
有人会问说,到底让这些x one到x m产生出来的几率越大越好是什么意思,跟上 P θ P_{\theta} Pθ和p data越接近越好有什么样的关系呢
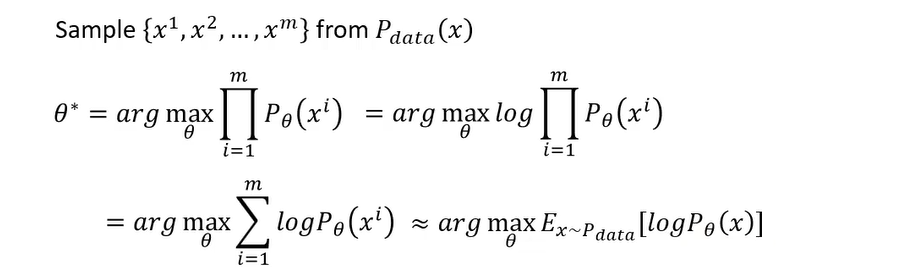
可以对之前的式子取log,不影响结果,log可以把乘传换成加。
我们从p data里面取x出来,然后做 P θ P_{\theta} Pθ计算,log( P θ ( x ) P_{\theta}(x) Pθ(x)),然后取x从p data里面simple出来的期望值,那这边呢因为我们一般在我们一般的操作中呢,这个image呢是已经先simple好的,所以我们这边可以取一个sumension,但是这件事情实际上可以近似于,假设你就是不断的从p data,比如说从网络上所有的图里面不断的找图出来,不断的爬图出来,那你要不让你所有爬到的图呢,它的log( P θ ( x ) P_{\theta}(x) Pθ(x))都越大越好
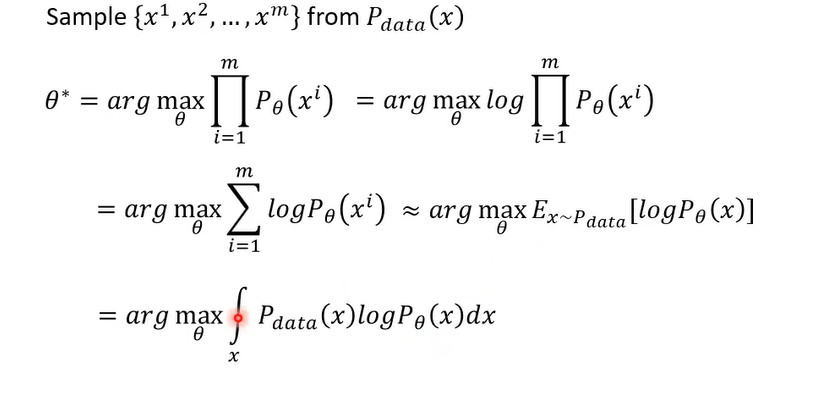
约等于这一步涉及大数定律,后面转成积分则是
这边呢有一个匪夷所思的操作直接剪掉即对x做积分Pdata x log Pdata x这一项有什么用呢,这一项毫无用处,因为它不会影响你的结果,这一项跟因为我们现在要找的目标是network的参数,那是谁的,那这一项只跟你的data本身有关,只跟这个世界上的image长什么样子有关,跟 θ \theta θ没有半毛钱关系的,所以加入这项完全不会影响你的结果,但加入这一项的好处是什么呢,加入这项好处是,我们现在可以把这两项合并在一起,这两项合并在一起
那对于这些影像的生成模型来说,像va e啊,diffusion model啊,还有flow base model,他们都是试图去maximum likelihood.。那像gan的话,gan是minimize某一个divergence,但它通常不是minimize kl divergence,最原始的gan他是minimize js divergence,如果你想知道的话,反正它就是另外一种divergence
那后来wgan啊是Wasserstein Distance,那你其实也可以修改一下gan的formulation,让它变成mini KL divergence,只是做出来不会更好,就是所以gan要mini KL divergence也是可以的
那接下来呢我们先看一下vae,那v a e是过去上课录音里面有的东西,那希望你有看过这段录音VAE,那等一下讲的几页图片,哎其实就是从之前的图片稍微改一下而已,那之所以先讲VAE,一是要让你知道说VAE和diffusion model,他们非常的类似,所以很多v a e里面推导过的东西,对diffusion model来说是不需要再推导一次
那我们先来看一下在VAE里面,所谓的 P θ ( x ) P_{\theta}(x) Pθ(x) 它是长什么样子,呃我们说这个 P θ ( x ) P_{\theta}(x) Pθ(x) 是什么东西呢,啊就是我们把input的,从高斯distribution sample出来的vector,通过network所形成的distribution
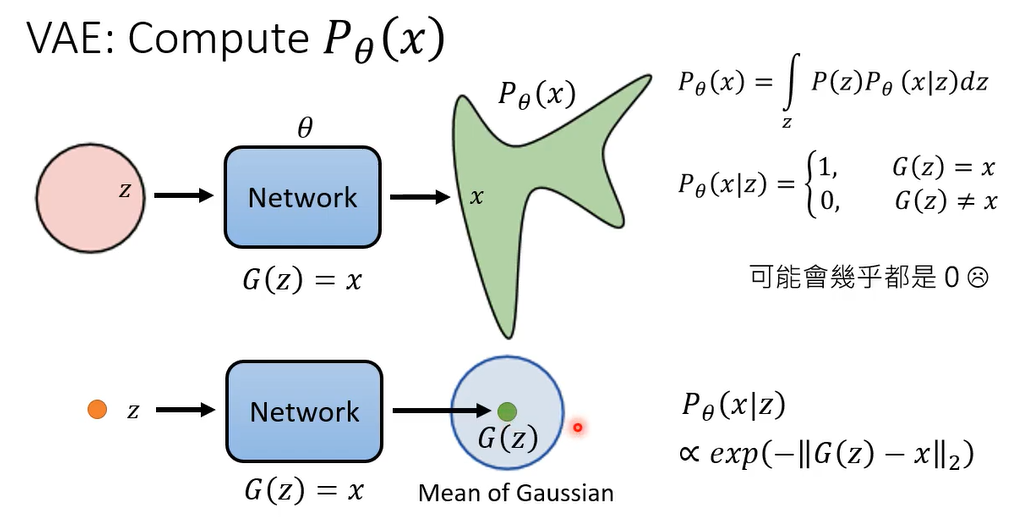
G(z)代表的是mean of Gaussian,这个 P θ ( x ∣ z ) P_{\theta}(x|z) Pθ(x∣z)那,他的这个probability density 呢,正比于这个G (z)跟x的距离啊
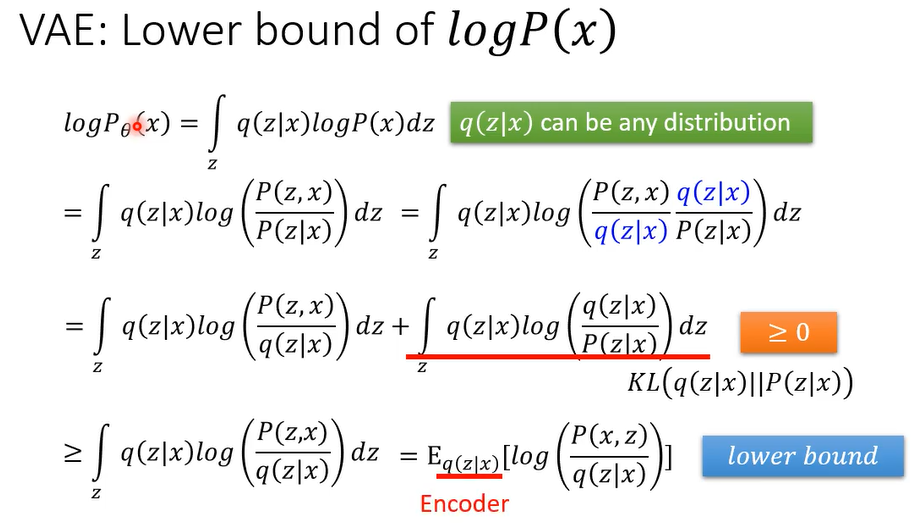
好那我们通常在算这个v a e的时候啊,呃你没有办法直接minimize P θ ( x ) P_{\theta}(x) Pθ(x),我们通常真正minimize是什么, P θ ( x ) P_{\theta}(x) Pθ(x)的一个lower,lower,它的一个下界啊,等下等一下在接下来的投影片里面, θ \theta θ通常都会被省略掉。
那我们来看一下在dd p m里面呢
这个
P
θ
(
x
)
P_{\theta}(x)
Pθ(x)是怎么被计算出来的呢
所以这个假设他只是一个假设而已,它并不完全合理,那你说那我们应该弄一个更复杂的distribution啊,不要说这个output就是一个guassian distribution啊,也许可以考虑更复杂的东西,而且这边我们都只考虑了mean,还没有考虑方差,怎么说,假设这个高斯每个dimension variant都是固定的,所以说能不能够把variance考虑进来的可以,但是过去的文献都告诉你说做出来不会比较好,就是所以这个假设是啊,现在你看到多数的模型va e呀,d d p M啊,都是用这个假设,就直接假设说输出是一个高斯的mean,他确实太过简单了,但是你用比较复杂的model做出来不会比较好的,然后接下来很多人会问的问题就是哎,那为什么是高斯呢,为什么不是别的玩意儿呢,跟你说,那当初假设别的玩意,你也会问同样的问题呀,哟这个这个用高斯还是有一些理由的,你会发现说中间有一些推导,如果这个不是高斯的话,你可能会呃保不定他这样
注意第一个P没有下标
θ
\theta
θ,因为第一个
X
T
X_T
XT是sample出来的,和network没有关系
其中
原理剖析3
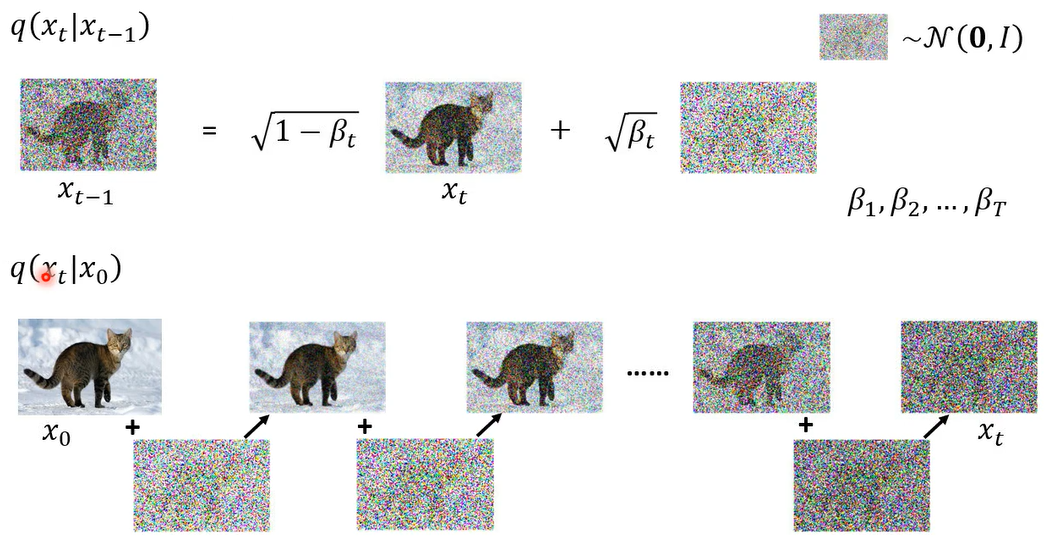
这q( x t ∣ x t − 1 x_t|x_{t-1} xt∣xt−1)怎么算呢
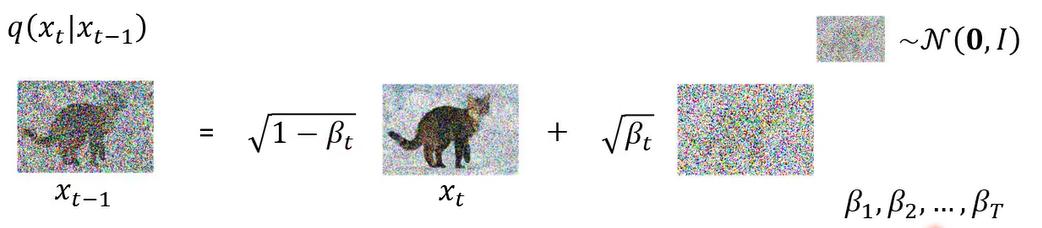
你先有一张图叫做x t等等,前面的乘上根号一减贝塔t,那这个贝塔t呢是事先准备好的值了,你会先定一个值,叫你会先定义一串值,叫做贝塔1到贝塔T,就是你要事先定好,那这个东西有点像是hyperparameter,你可以调啊,贝塔t代表在每一步的时候,我们的noise呢要加多大加多大,那这个noise呢是从一个mean零,,variance是1的一个高斯distribution sample出来的
其实q( x t ∣ x 0 x_t|x_{0} xt∣x0)是可以直接算出来的
看看怎么做的
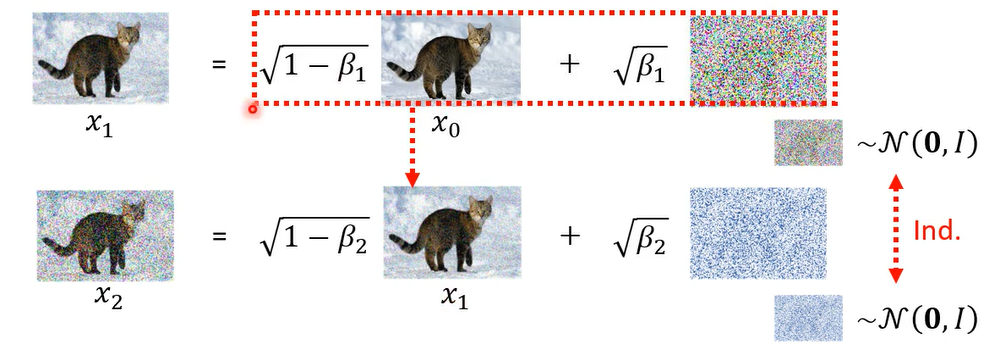
那这两个noise simple的过程,他们是independent,他们是从同样的distribution sample出来,但是这两次的simple是独立的。那接下来呢我们可以把x 1带到这里面
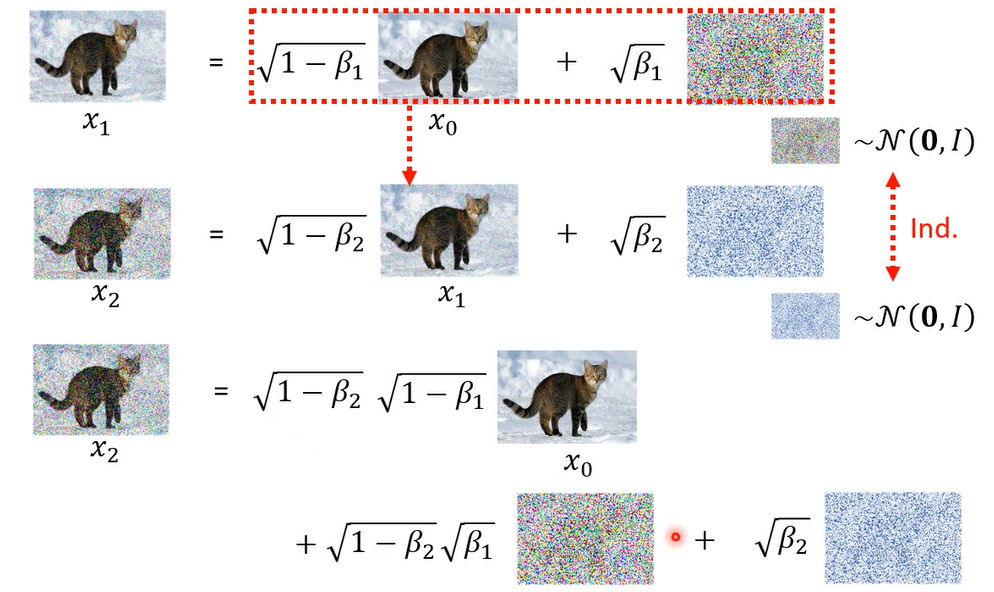
从同一个高深distribution sample两次,再乘上两个不同的weight加起来
,这一个distribution可以把它简化成只simple一次,前面乘另外一个不同的weight,
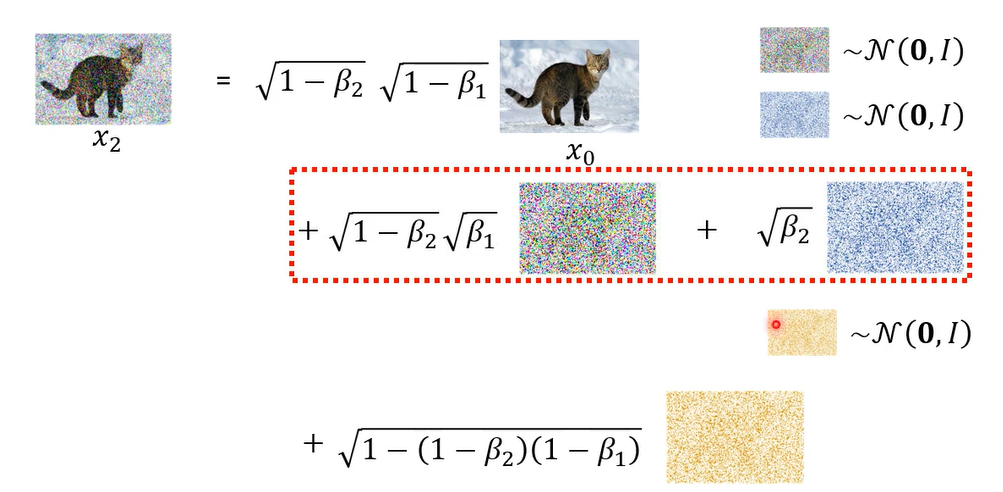
所以从高斯distribution里面,simple两次前面分别乘上这两个weight,它产生出来的distribution等同于从同一个高深distribution to sample一次。所以x2就等于
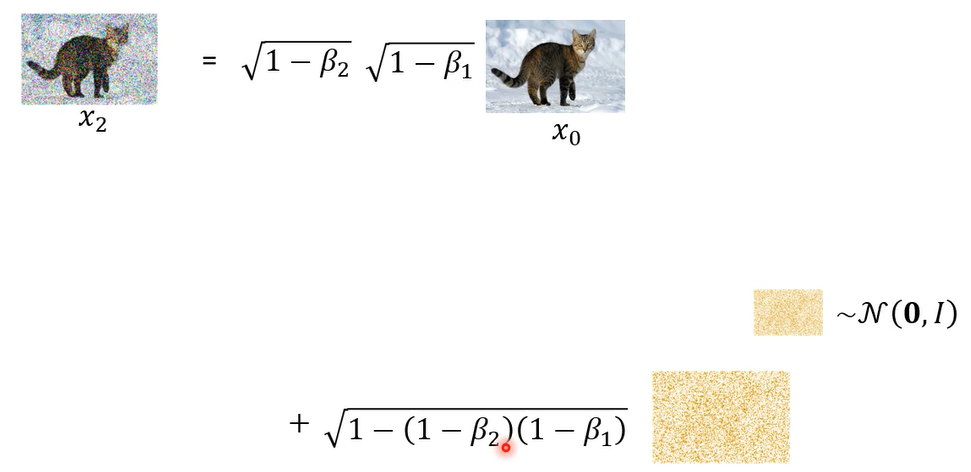
以此类推
本来我们以为从x0 到x t,你要就是做一次simple,一次simple,一次simple,总共做t次simple,你才会得到它,但是其实这整个过程就是一步到位就好,就做一次simple就可以产生x t
那我们这个这一项啊,是我们真正要minimize的lower bar,接下来你要把它经过一番整理,变成你可以算的样子
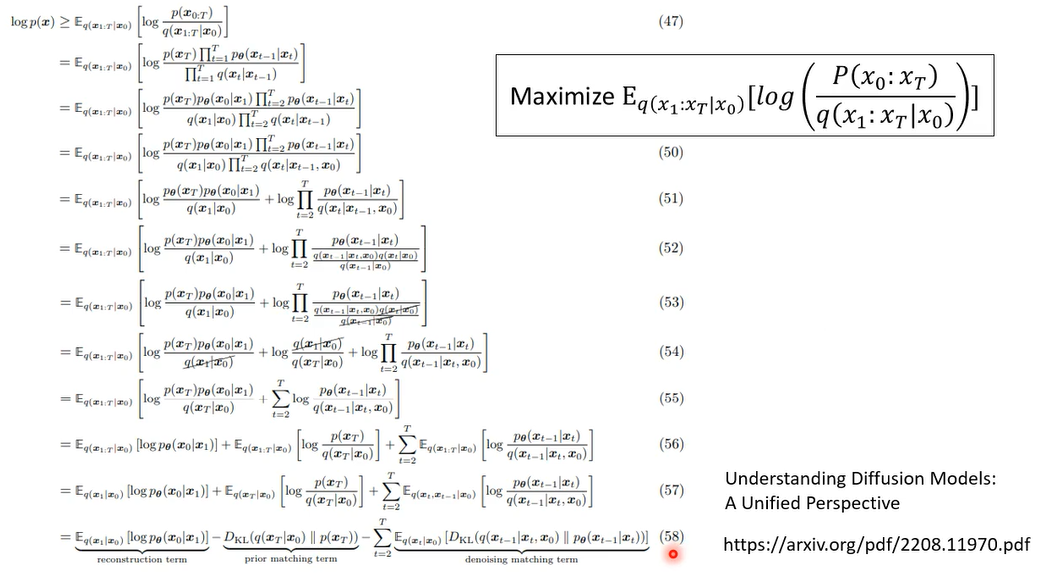
我们把最后一行放大一点
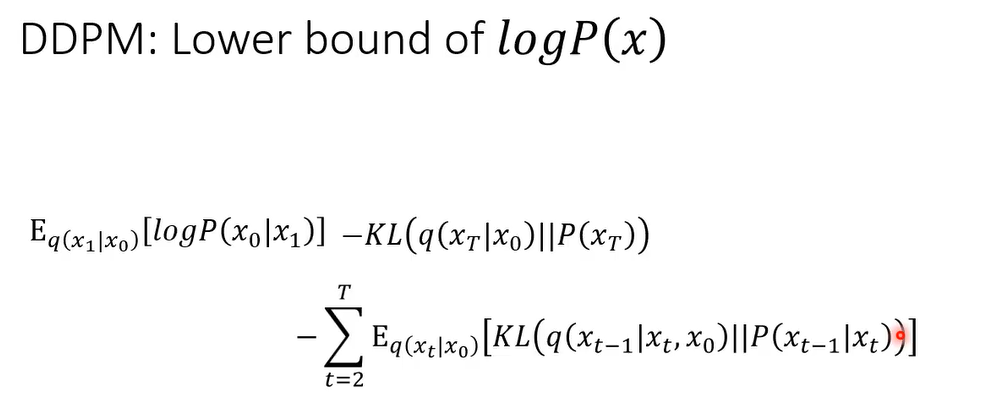
第二项和network没关系,第一项和最后一项计算类似,这里只看最后一项
蓝色框怎么算,q( x t ∣ x 0 x_t|x_{0} xt∣x0)和q( x t − 1 ∣ x 0 x_{t-1}|x_{0} xt−1∣x0)以及q( x t ∣ x t − 1 x_t|x_{t-1} xt∣xt−1)你都知道怎么算,但是蓝色框内怎么算
现在是给你 x 0 x_0 x0和 x t x_t xt求中间的 x t − 1 x_{t-1} xt−1
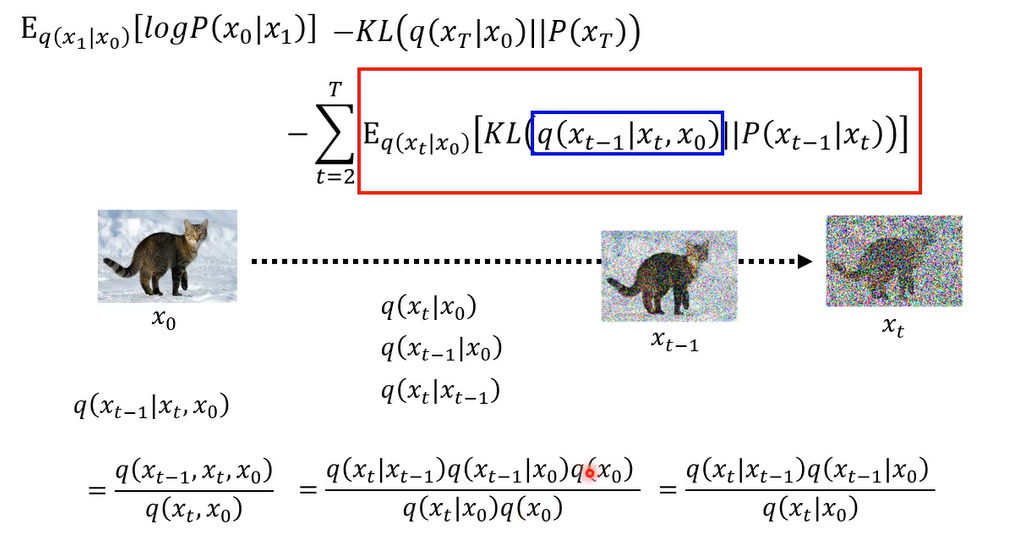
这个式子可以经过一番化简,刚好成为你知道的那三个式子
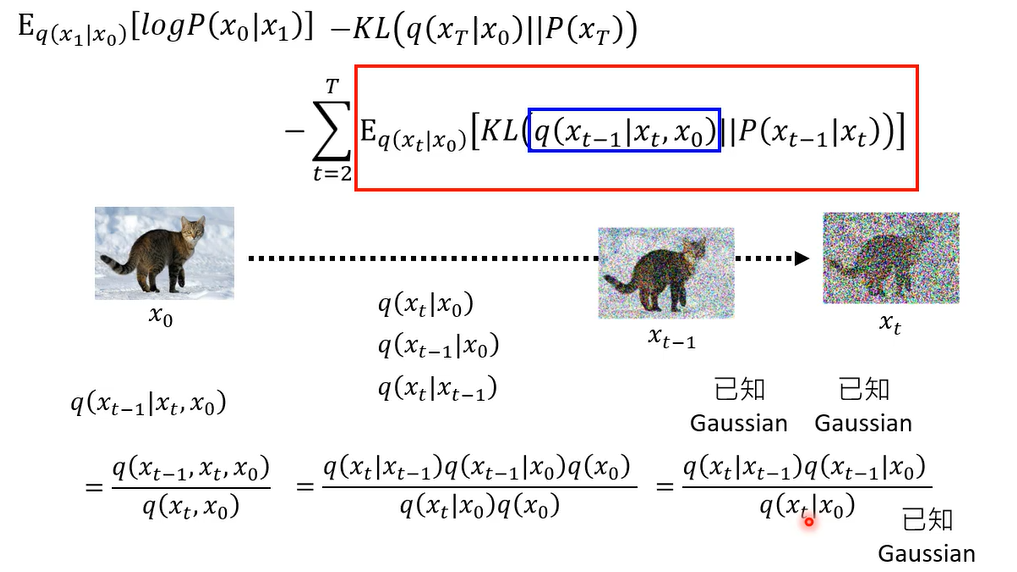
这三项都是高斯distribution,这三项的mean你也都知道,这三项的mean跟variance你也都知道,但是把这两个distribution相乘,再除个东西到底长什么样子,接下来呢这个也是不适合做成投影片的
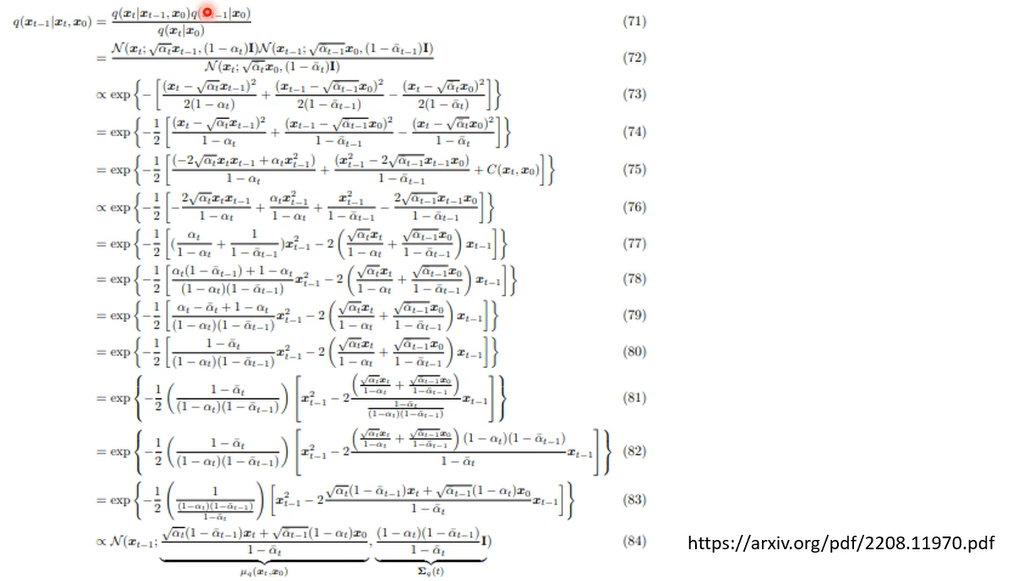
在文献上的就是你看这篇overview,经过一番疯狂的倒推以后,就是因为这三个distribution你是知道的,你知道他们的probability density function长什么样子,带进去硬推,硬推完以后,它的结果呢就是它仍然是一个高斯distribution,这高斯distribution的mean跟various分别长成这个样子
等于就是把x0 和xt做interpolation,哎所以这听起来感觉这个还蛮合理的啊
我们要计算的是这两个distribution kl divergence,那两个高选distribution kl divergence是有公式解的,那把公式解放在下面,理论上,你就你知道这两个高深distribution,你也知道他们的mean跟variance套以下公式,你是可以计算他们,但是呢,其实你是可以用更简单的方法,把这个kl divergence计算出来的
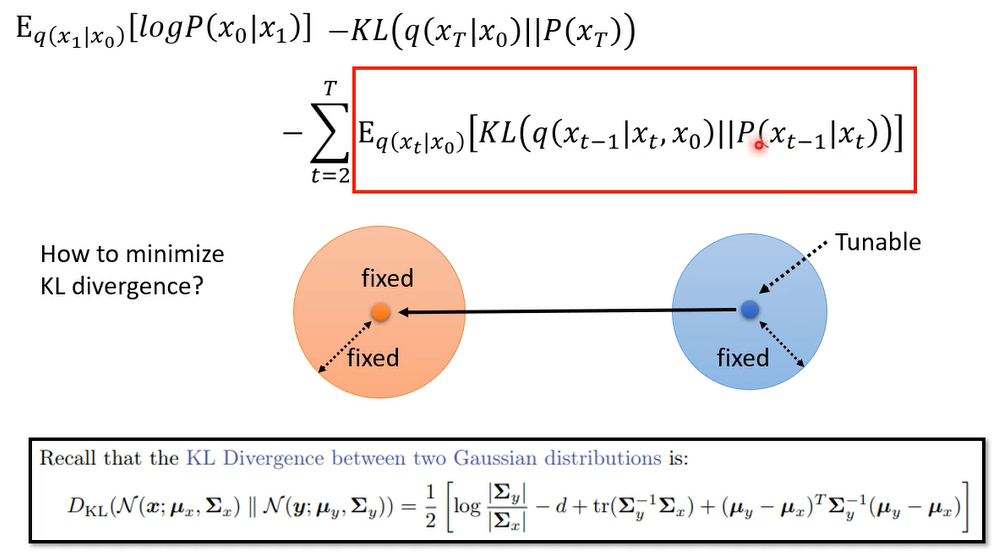
因为我的目标就是要mini这个kl divergence,而左侧是一个高斯distribution ,mean和variance是固定的,而右侧它是由你的network来决定的,由你的denoise的model来决定的,但是他的variance也是固定住的,我们根本就不考虑那个the denoise model 的variance,就假设它output的那个高清distribution,variance 每个dimension都是个定值,不不讨论他,那其实也有文献试图讨论他,但你好不了多少就是了,所以不讨论他的variance ,我们只考虑他的mean,他的mean倒是可以动的,因为它的面是取决于我们的denoise那个model,那如果我们要让这两个高斯distribution,他们的kl divergence越接近越好,那你唯一让他们为了接近越好,方法是不是把他们两个的mean让他越接近越好
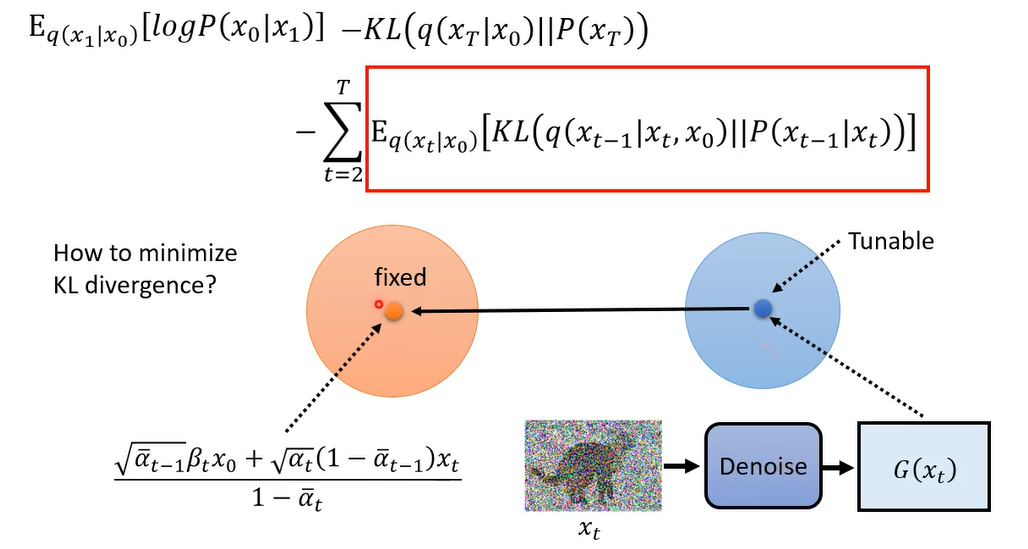
这个mean呢它是从denoise的model跑出来的,把x t丢进去看看我们会输出什么东西,输出来的东西就是P(
x
t
−
1
∣
x
t
x_{t-1}|x_{t}
xt−1∣xt)的mean,我们要让这两个mean越接近越好,左边它是固定的,所以实际上我们做的事情就是train这个denoise的model,让他们越接近越好。那实际上这一项到底要怎么minimize呢
它minimize的过程是这个样子的
因为前面这边的expectation
这边呢有一项是
q
(
x
t
∣
x
0
)
q(x_t|x_0)
q(xt∣x0)
所以x0 呢是先给定的,给定x0 的状态下呢
x t它其实是一个distribution啊
你把x0乘一个系数
加上
ϵ
\epsilon
ϵ乘一个系数得到x t啊
呃接下来你的denoise model
要做的事情就是吃一个xt,吃一个t,它output的结果要跟 q(
x
t
−
1
∣
x
t
,
x
0
x_{t-1}|x_{t},x_{0}
xt−1∣xt,x0) 的mean越接近越好
因为我们知道xt和x0的关系,所以还能进一步化简。
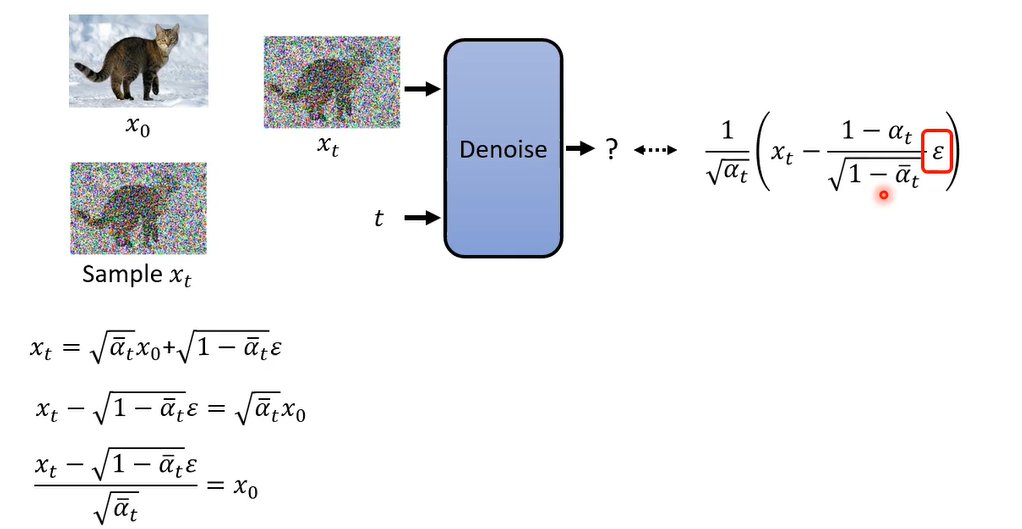
所以说那在这个他要输出的目标里面
其实只有
ϵ
\epsilon
ϵ是真正需要去predict,network真正需要去predict的只有
ϵ
\epsilon
ϵ,其他的阿尔法还有阿尔法拔都是常数
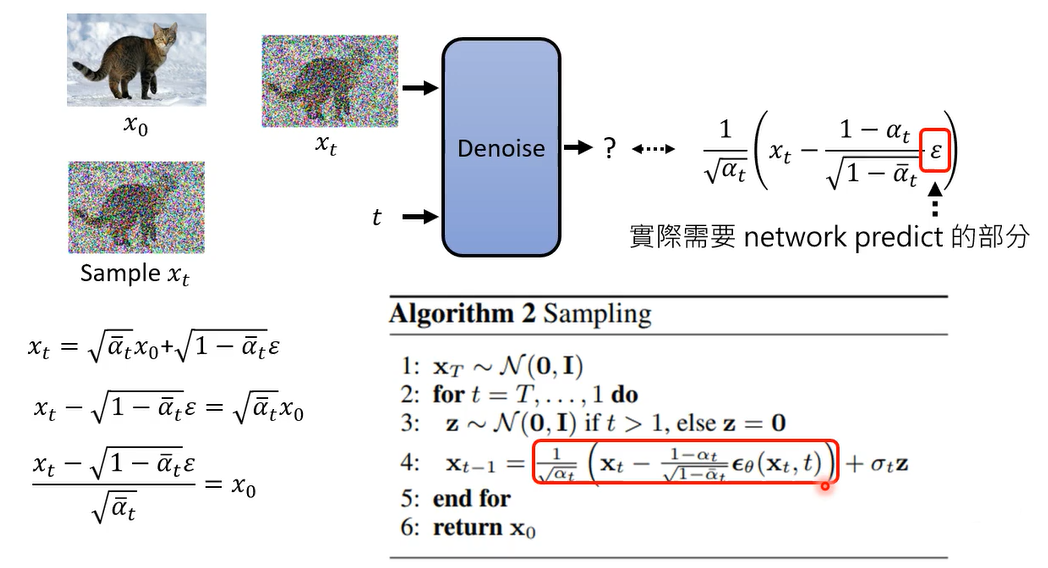
所以network唯一需要预测的就是加到x t里面的,那个noise就是 ϵ \epsilon ϵ,所以你会发现说这个式子就跟sampling的时候的,那个式子是一模一样的
阿尔法就当做是一个你事先设好的,hyperparameter好,然后你说哎那我如果我就是心情好,我想要劝一下阿尔法可不可以呢,其实d d p n的paper没开始有写,他说他们试图train了一下阿尔法,结果没有比较好哦,所以之后都不要管那个阿尔法了
就是在d d p m里面呢,它有一个schedule的process,就是这个阿尔法是谁决定的呢,这个阿尔法是被他决定的,记不记得我们前面在讲的时候,我们是说这个阿尔法t就是一减贝塔t嘛,所以你真的需要决定的是那个贝塔t,那贝塔t能不能认呢,呃可以learn,但是d d p n paper一开始就跟你说,哎learn的没有比较好,这样我就不learn了
所以你要用手设,那用手设怎么样比较好呢,啊他们里面给的一个建议,就是他们的那个贝塔是由小到大这样子啊,一开始是比较小的值,然后后来越来越大,但是那个增加的过程应该怎么设比较好呢,其实不知道他们就设一个这个利率增加的过程,那会有另外一篇paper,我记得如果没记错,他的title应该叫improve dd p a,那你就试着说啊,那是一个别的那个啊,贝塔的schedule,看会不会比较好,就试出一个比较好的schedule,所以这个有点像是hyperparameter是要调的
原理刨析4
但是讲到这里还没有解决的一个问题,就是为什么最后还要多加一个noise呢
当然你可能会说我们既然说这个dnoise,the module,它的output就是一个高斯的distribution,我们现在denoise的model真的算出来的只是高斯的mean,我们在sample的时候当然要加上一个noise,,代表说考虑当选的variance这一项
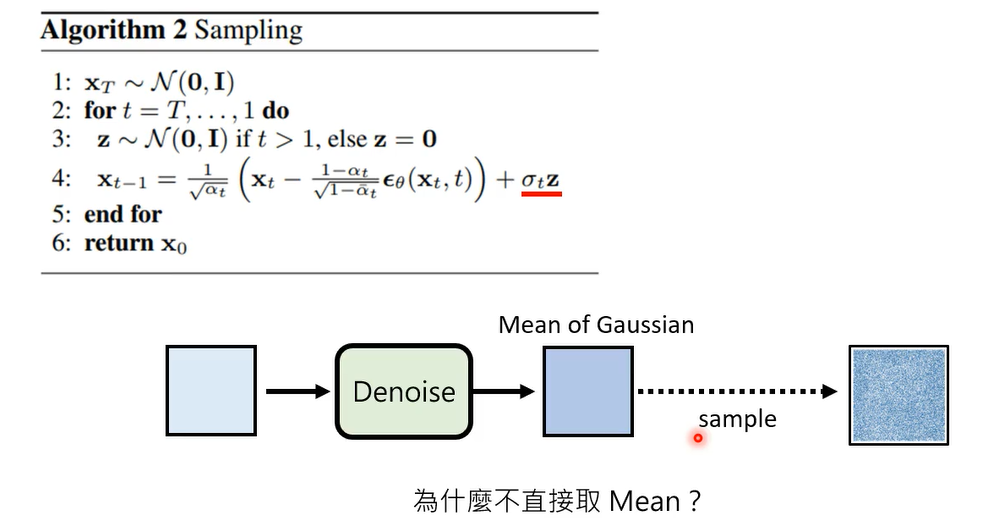
高斯取均值,也就是u的时候概率最大
先看一个类似的例子
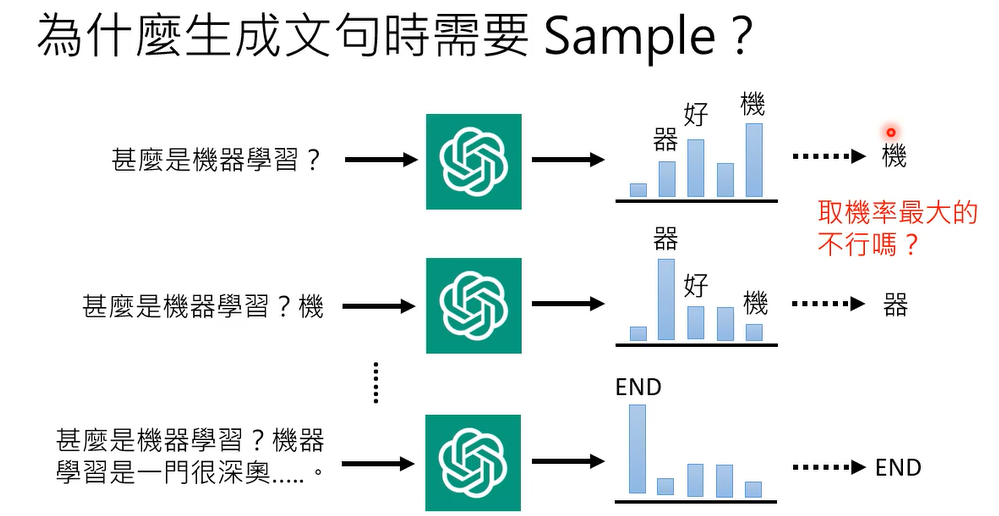
那有人可能会说这个取这个做sample的好处,就是你每次问同一个问题,chatgpt的答案都不一样,那为什么一定要这样呢,为什么不能固定住,就取几率最大的,但模型每次都回答几率最大的句子,这样不是也很好吗,有很多应用,你其实会希望说,你的模型的output每次都是固定的,为什么需要有随机性能,那其实这个问题过去就已经有人问过了,有一篇paper叫做the curious case of neural degeneration
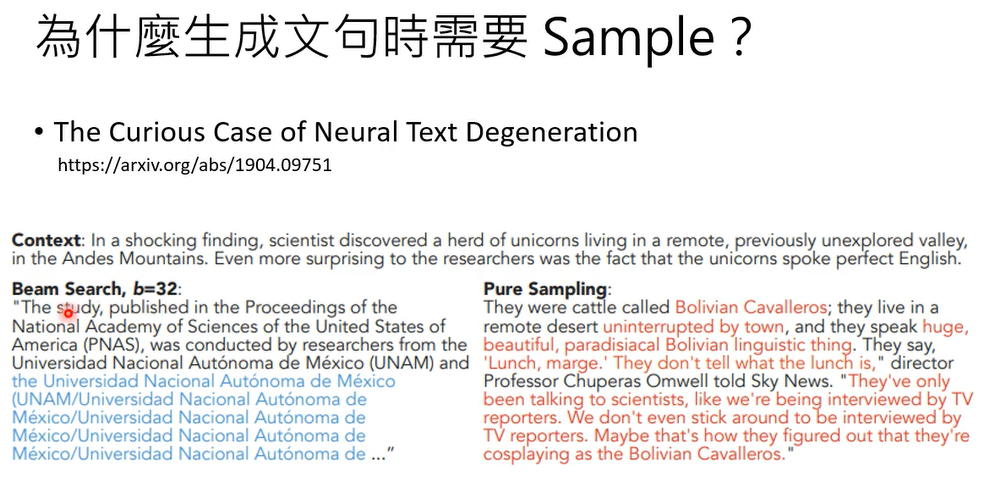
那时候发现说如果你取几率最大的,你用你取几率最大的句子,每次你都取几率最大的词汇,你output的结果啊会是不断重复的句子,机器就会开始不断的跳帧,讲重复的话,虽然你做sampling,感觉机器比较会说一些奇奇怪怪的话,但是跟跳帧比起来,感觉simple的结果是比较好
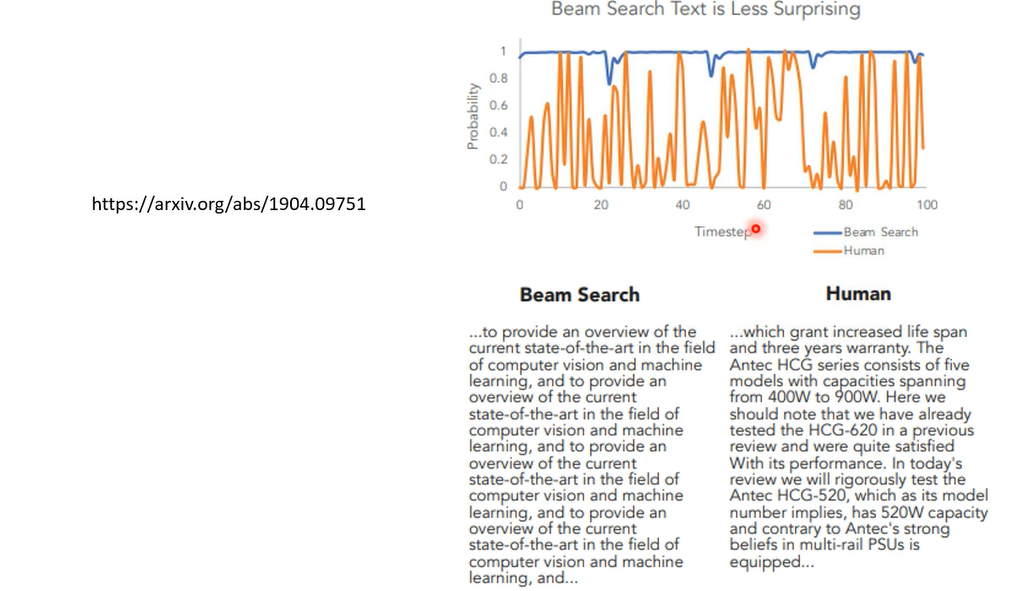
为什么呢,他做了一个分析,说我们来看看人写的句子吧,右边橙色这条线代表的是人写的句子,那右边是人写的一篇文章,我们来用我们的language model来计算,人写的这篇文章里面每一个字根据我们的language model,根据gp t two所计算出来的几率,你会发现说人写出来的文章,他用字遣词,并不是选几率最大的那一个词汇,那如果你看机器写的文章,他今天让机器选这个几率最大的词汇,让几率每当机器每一次产生字的时候,都产生几率最大的那一个字,那他发现说虽然这个句子机器产生出来的句子,它是几率最大的,但是它就是一个很奇怪的句子,你发现他不断重复在讲重样的话,the state of the art,the state of the art,一直讲一直讲,要反复讲,一样的话,当你在做生成的时候,几率最大的生成结果未必是最好的结果,那人在写一篇文章的时候,也许我们并不会选几率最大的词汇,选几率最大的词汇,他可能呃呃是最经典的,最常出现的词汇,但也是最无聊的,而且会反复出现同样的内容,这个是在文字上面的观察,但其实在语音上也有一样的观察
那今天呢语音当然都是用呃语音的,语音合成的模型都是用end to end做的啦,直接输入文字输出音轨
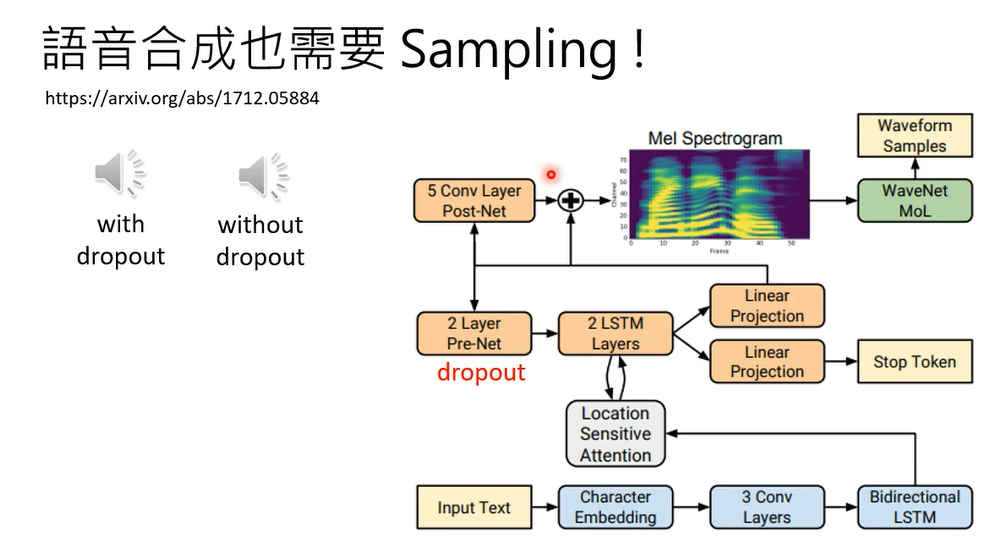
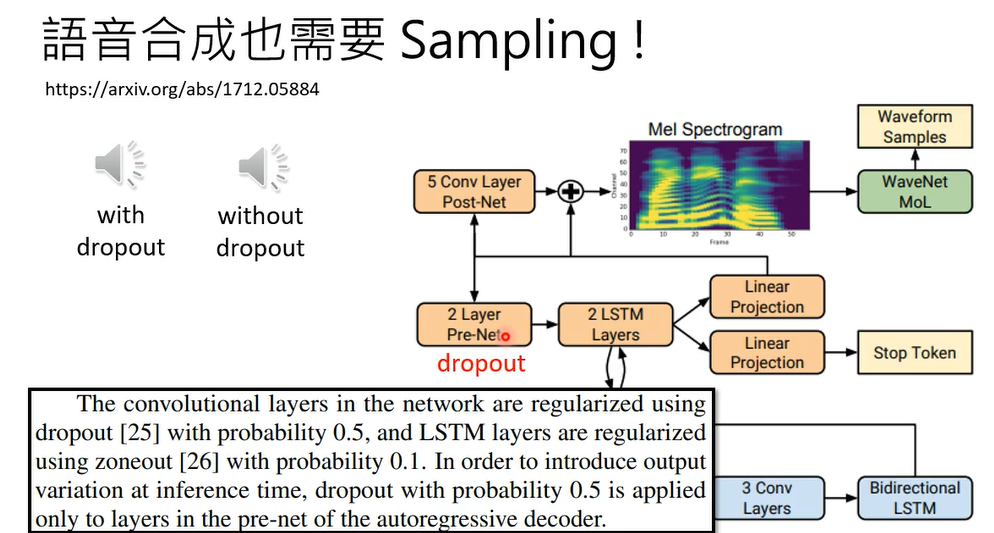
在testing加dropout。
所以会不会diffusion model也是同样的道理呢
实验验证后,也发现加noise是必要的
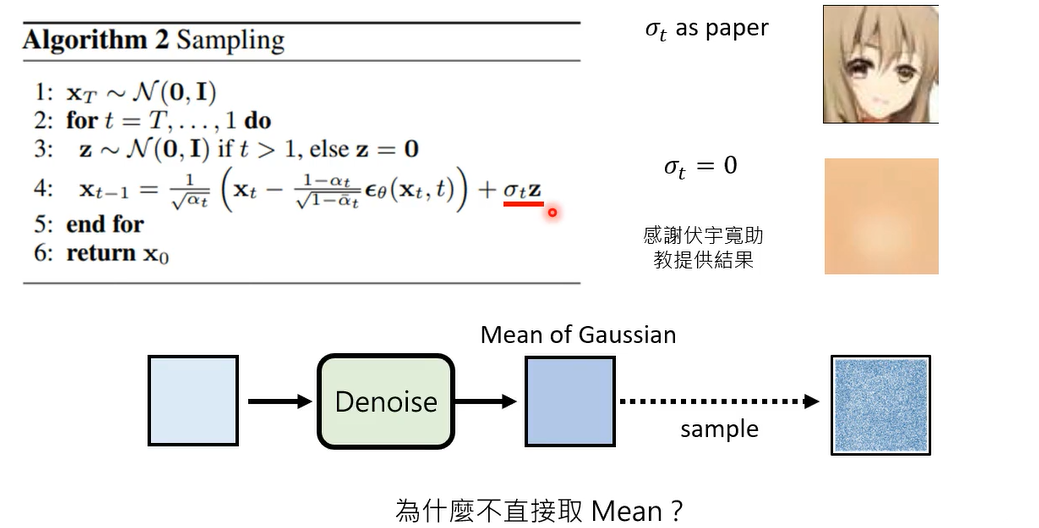
那这个就是diffusion model里面的玄机了啊
今天就告诉你说training的时候诶,为什么x为什么不是一次一次加noise,而是一步到位,加一次noise,就直接把它denoise掉呢,那这个我们已经讲过了
。然后呢也顺便讲一下,为什么在做simple的时候,我们是需要加noise
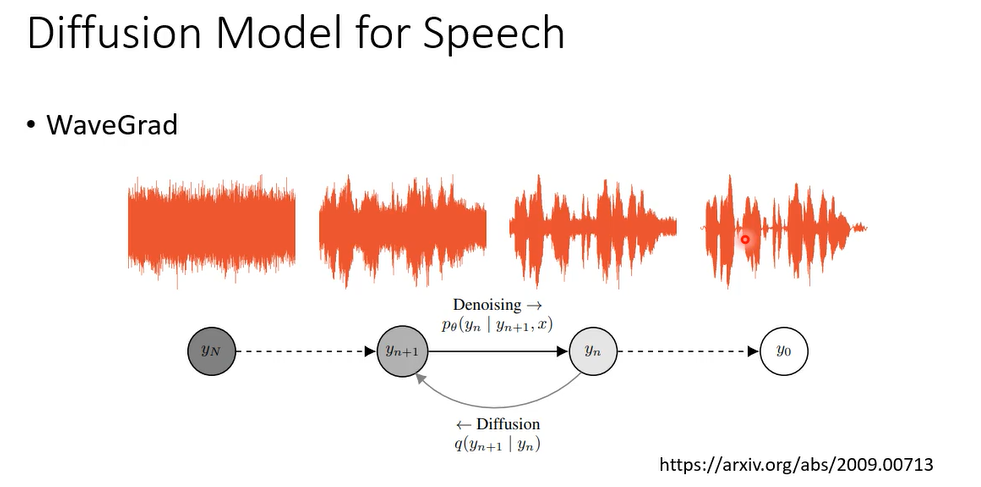
那这个diffusion model啊不是只能用在影像上,那在语音上也可以做diffusion model,做语音合成,这个就没有什么好讲的,跟影像上就是一模一样的啊,本来影像的input是2d的东西,把现在input变成1d的东西,你从一个完全高斯的simple的资讯,然后慢慢一步一步的做denoise,把它变成一段声音讯号,那就可以做语音合成。
但是把diffusion model坐在文字上就很麻烦了,至少你没办法直接apply DDPM,为什么没有办法直接派dd p m,你想我们今天做diffusion model的时候,我们就是希望说input image或input,一个一段声音讯号,你一直加高斯的noise,加到最后它就变成只有高斯的noise,没有其他的东西,看不出来原来是什么,但文字是discrete的东西,你没有办法把一个discrete的东西,一直加noise上去,让它变成完全是高斯,看不出来原来是什么东西。
一种方法是,我们今天就不讲细节,只讲大方向的概念,因为大方向的概念是不要把noise加在文字上,文字是discrete,没办法加noise怎么办哦,加在比如说加在word emdedding上,就这样结束了
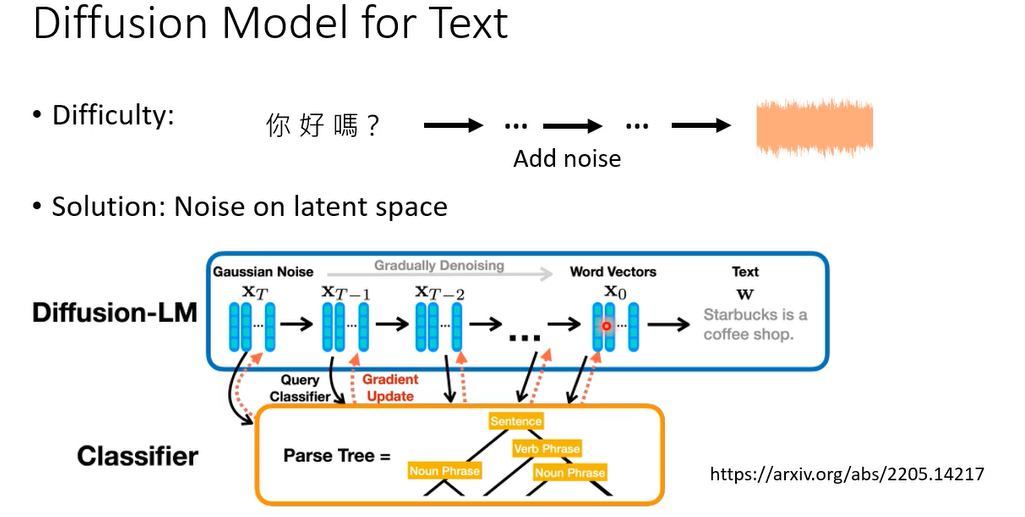
还有就是DiffuSeq
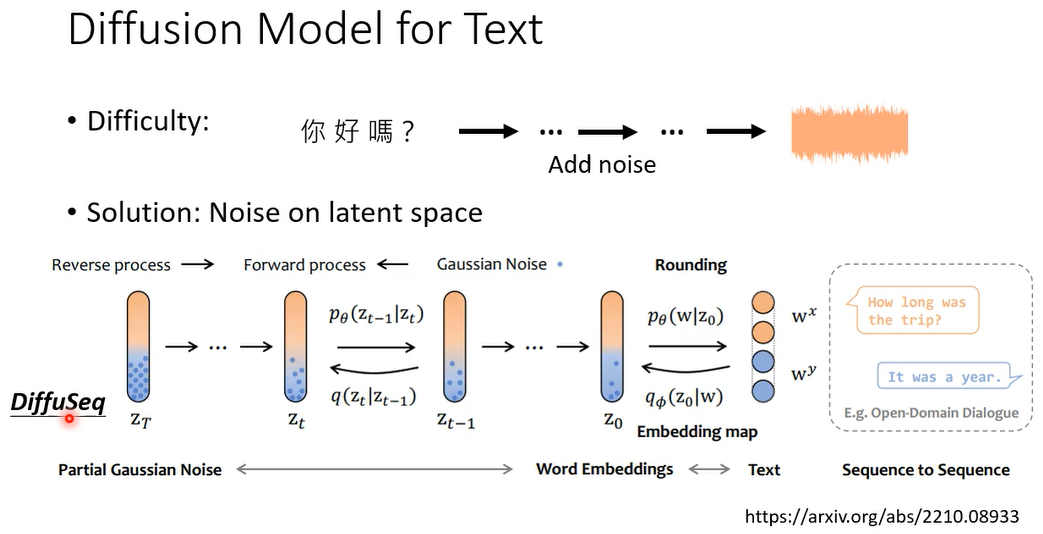
它是一个sequence to sequence和model啊,概念也是一样,反正就是在latent representation上面做这个diffusion
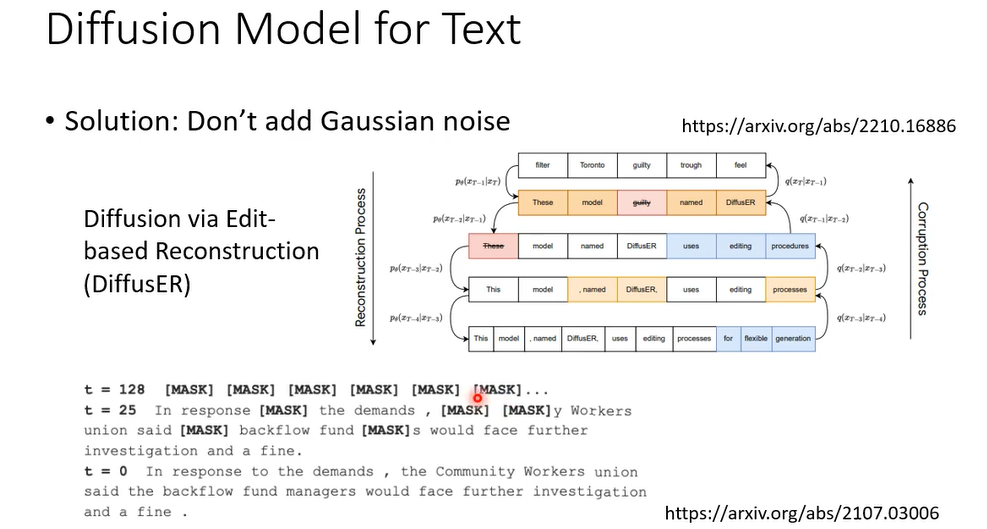
那还有另外的做法,这另外的想法是说,假设加高斯distribution,加高斯的noise是不行的,假设高斯,那也不能够加在文字中,discrete东西上,那能不能够想些其他的方法,其他种类的noise,其他种类的diffusion process加到文字上的,所以有另外一个系列的work,他们的走向就是把其他种类的diffusion process,加到文字上,所以他们到时候他们的这个这个noier distribution,就不是高斯,比如说这篇paper里面,他noise distribution都是全部都是mask,他们的这个xT呢是全部都是mask的句子,然后再慢慢的把有mask的地方呢填回来
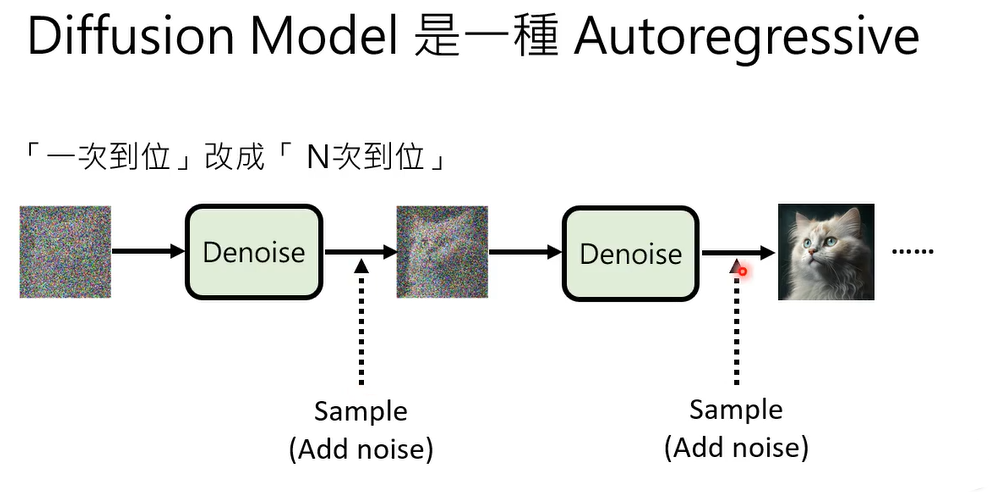
Diffusion Model的成功在于它将生成任务分解为多个小步骤(“n次到位”),借鉴了Auto-regressive Model逐步生成的优势,同时通过去噪的方式避免了Auto-regressive Model的一些局限性。这种分步生成的思想使得Diffusion Model在生成质量、稳定性和灵活性方面表现出色。
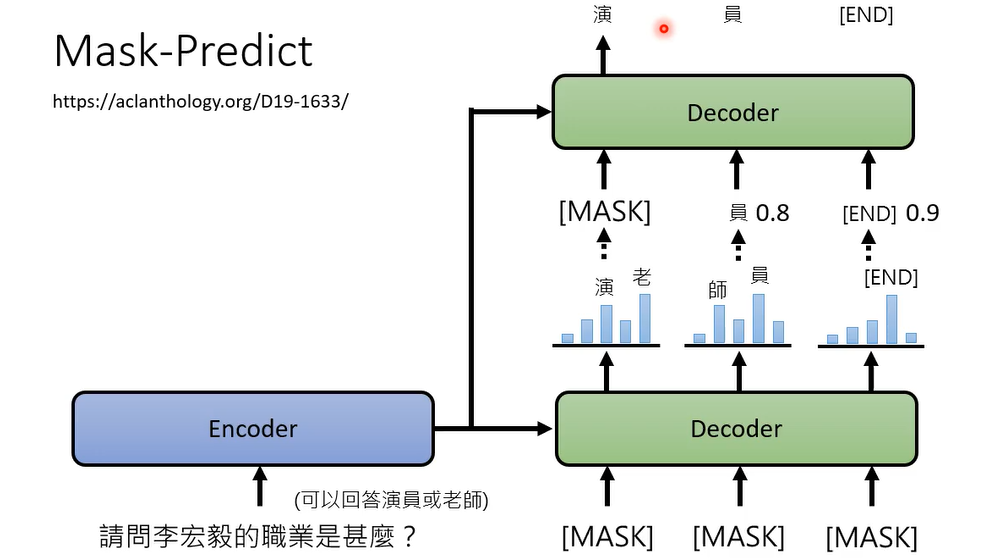
如果同样的输入可以有不同的答案,,那auto regressive model它可能会产生非常糟的结果,假设你有一个decoder,他是auto regressive是一次到位的一个model,就是输入给他一串mask,他把这些mask统统变成文字,那是因为他无法决定,到底答案应该是要演员还是老师,所以第一个字出现演跟老的几率都很大,然后第二个字出现师跟员的几率都很大,最后你做simple的时候,结果就会不好,那怎么办呢,有一个方法叫mask predict,如果今天第一次出现的结果不够好,那就再做第二次,把simple出来的结果里面几率比较低的,就你今天simple的时候,你会知道它原来的几率是多少吗,把几率比较低的部分用mask盖住,重新再做一次结果的生成
像这样的方法不只用在NLP上,也用在影像上
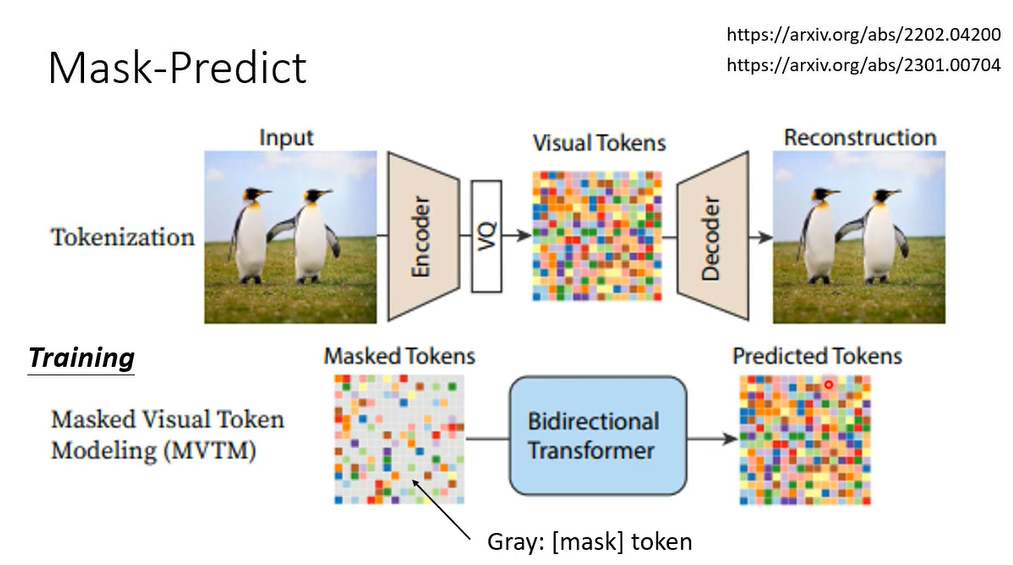
训练的时候把mask的部分猜回来,那生图的时候怎么做呢
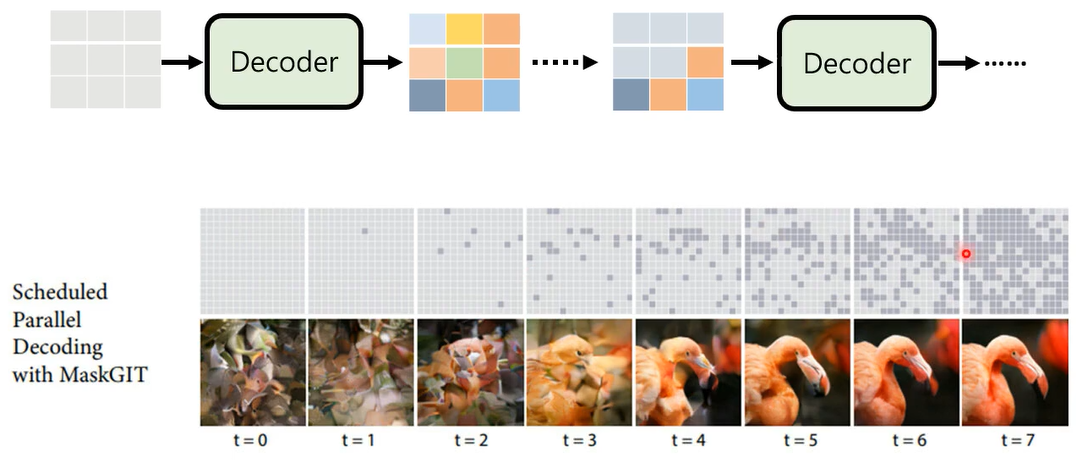
一开始你的图呢全部都是mask,把这个全部都是mask的图丢到decoder里面,decoder呢就产生一张图片,但是它产生出来的结果,里面的一些信息分数比较低的部分,把它再盖住,再重新mask,然后再重新生图,来用这个方法做也可以产生很好的结果
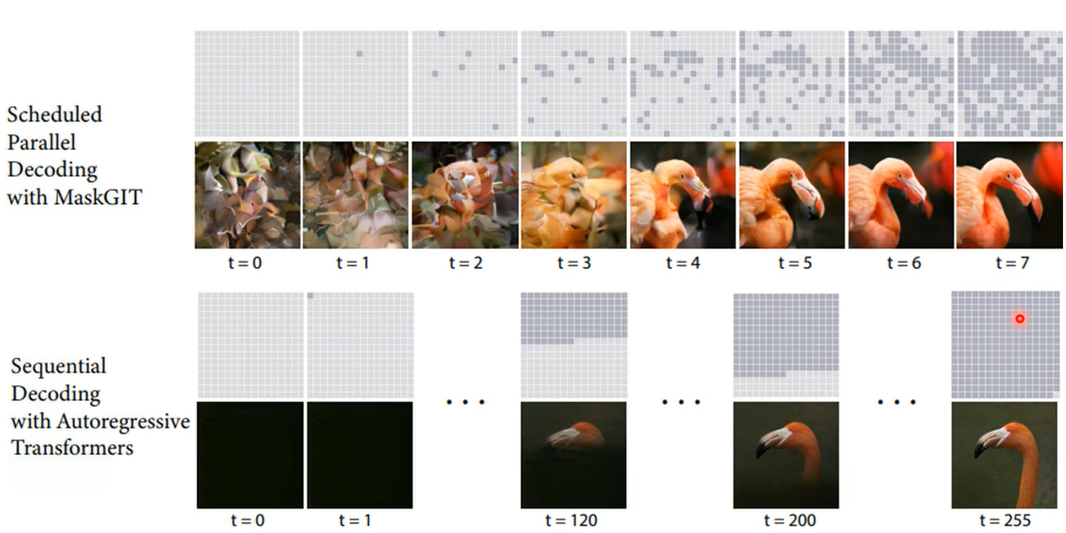
重点是把那auto regressive model加入
auto regressive的优势
这可能是diffusion model成功的关键
参考资料


















 1898
1898

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











