







 本文介绍了自动驾驶中的规划模块,包括路径规划、行为决策和运动规划。路径规划利用Dijkstra和A*算法寻找最短路径。行为决策层处理复杂环境中的决策问题,而运动规划则将行为转化为具体轨迹。Frenet坐标系简化了行驶轨迹的计算,以道路中心线为参考进行定位。
本文介绍了自动驾驶中的规划模块,包括路径规划、行为决策和运动规划。路径规划利用Dijkstra和A*算法寻找最短路径。行为决策层处理复杂环境中的决策问题,而运动规划则将行为转化为具体轨迹。Frenet坐标系简化了行驶轨迹的计算,以道路中心线为参考进行定位。
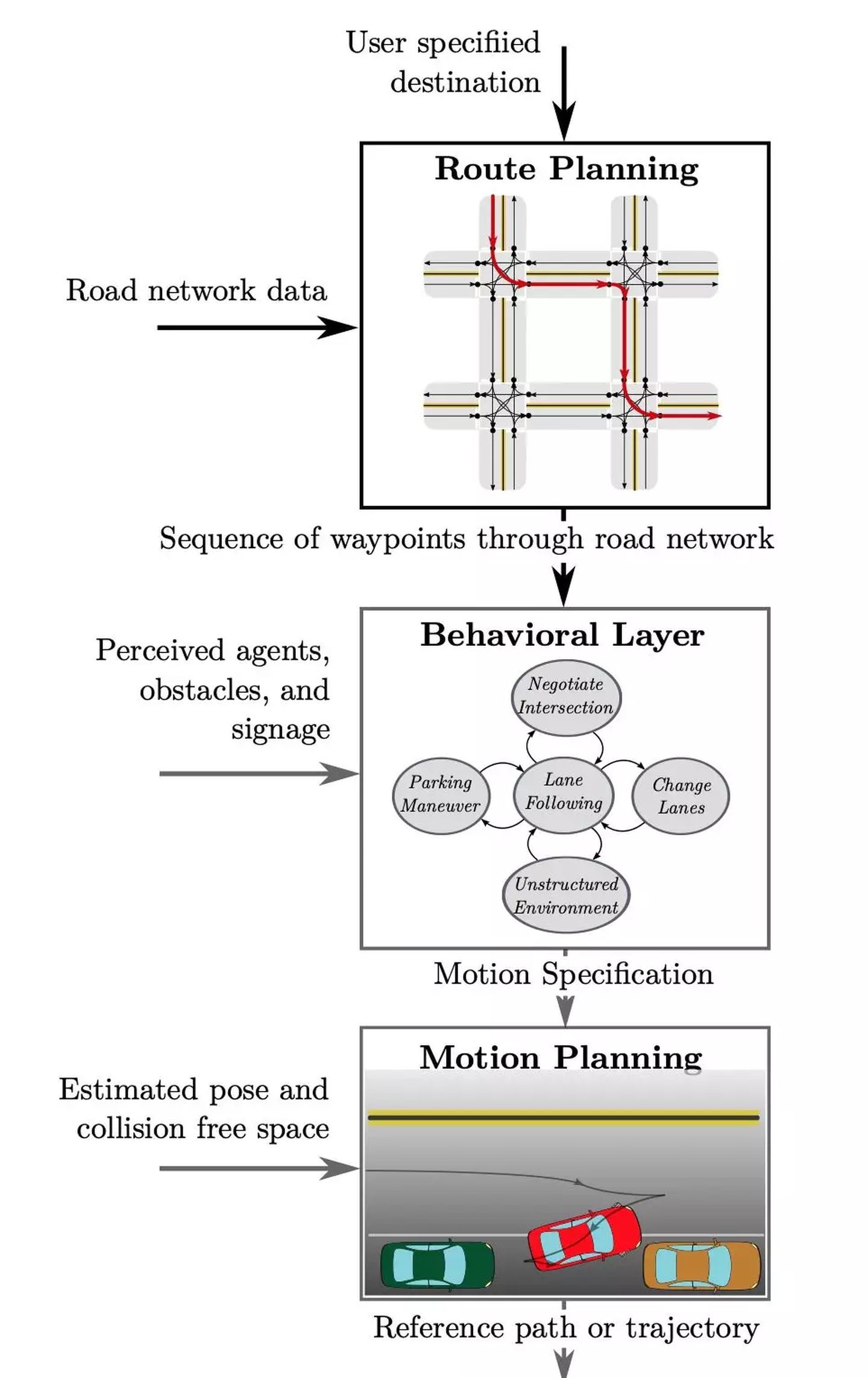
决策模块分为三个层次:
其中,全局路径规划(Route Planning)生成一条全局的路径。
行为决策层(Behavioral Layer)在接收到全局路径后,结合从感知模块,作出具体的行为决策。(包括其他车辆与行人,障碍物,以及道路上的交通规则信息,例如选择变道超车还是跟随)。
最后,运动规划(Motion Planning)层根据具体的行为决策,规划生成一条满足特定约束条件的轨迹,该轨迹作为控制模块的输入决定车辆最终行驶路径。(例如车辆本身的动力学约束、避免碰撞、乘客舒适性等)
路径规划(Route Planning):
Dijkstra算法:
Dijkstra算法是由计算机科学家Edsger W. Dijkstra在1956年提出,用来寻找图形中节点之间的最短路径。在Dijkstra算法中,需要计算每一个节点距离起点的总移动代价。同时,还需要一个优先队列结构。对于所有待遍历的节点,放入优先队列中会按照代价进行排序。在算法运行的过程中,每次都从优先队列中选出代价最小的作为下一个遍历的节点。直到到达终点为止。
Dijkstra算法的优点是:给出的路径是最优的;缺点是计算时间复杂度比较高(O(N2)),因为是向周围进行探索,没有明确的方向。
A*算法:
为了解决Dijkstra算法的搜索效率
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









