




 本文详细介绍了使用Python实现全景图像拼接的原理与步骤,包括图像配准(APAP算法)、图割方法和图像融合。在实验中,作者通过固定点位和更换拍摄位置分析了拼接效果,遇到并解决了图像尺寸不一致、运行时警告等问题。
本文详细介绍了使用Python实现全景图像拼接的原理与步骤,包括图像配准(APAP算法)、图割方法和图像融合。在实验中,作者通过固定点位和更换拍摄位置分析了拼接效果,遇到并解决了图像尺寸不一致、运行时警告等问题。
文章目录
一、原理
1全景拼接
将SIFT应用到图像拼接上,根据特征点匹配的方式,则利用这些匹配的点来估算单应矩阵(使用上面的RANSAC算法,也就是把其中一张通过个关联性和另一张匹配的方法。通过单应矩阵H,可以将原图像中任意像素点坐标转换为新坐标点,转换后的图像即为适合拼接的结果图像。可以简单分为以下几步:
1.根据给定图像/集,实现特征匹配。
2.通过匹配特征计算图像之间的变换结构。
3.利用图像变换结构,实现图像映射。
4.针对叠加后的图像,采用APAP之类的算法,对齐特征点。(图像配准)
5.通过图割方法,自动选取拼接缝。
6.根据multi-band blending策略实现融合。
1.1图像配准
图像配准是对图像进行变换,使变换后的图像能够在常见的坐标系中对齐。为了能够进行图像对比和更精细的图像分析,图像配准是一步非常重要的操作。图像配准的方法有很多,这里以APAP算法为例:
1.提取两张图片的sift特征点
2.对两张图片的特征点进行匹配
3.匹配后,仍有很多错误点,此时用RANSAC进行特征点对的筛选。筛选后的特征点基本能够一一对应。
4.使用DLT算法,将剩下的特征点对进行透视变换矩阵的估计。
5.因为得到的透视变换矩阵是基于全局特征点对进行的,即一个刚性的单应性矩阵完成配准。为提高配准的精度,Apap将图像切割成无数多个小方块,对每个小方块的变换矩阵逐一估计。

1.2图割方法
最大流最小割算法原理,在下文博客中有很好的讲解
https://blog.youkuaiyun.com/qq_28739605/article/details/80684704
1.最小割问题
一个有向图,并有一个源顶点(source vertex)和目标顶点(target vertex).边的权值为正,又称之为容量(capacity)。如下图
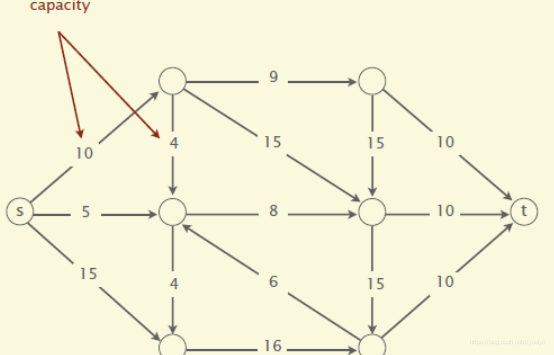
一个st-cut(简称割cut)会把有向图的顶点分成两个不相交的集合,其中s在一个集合中,t在另外一个集合中。
这个割的容量(capacity of the cut)就是A到B所有边的容量和。注意这里不包含B到A的。最小割问题就是要找到割容量最小的情况。
2.最大流问题
跟mincut问题类似,maxflow要处理的情况也是一个有向图,并有一个原顶点(source vertex)和目标(target vertex),边的权值为正,又称之为容量(capacity)。
(1)初始化,所有边的flow都初始化为0。
(2)沿着增广路径增加flow。增广路径是一条从s到t的无向路径,但也有些条件,可以经过没有满容量的前向路径(s到t)或者是不为空的反向路径(t->s)。
1.3图像融合
图像拼接完成以后会发现在拼接的交界处有明显的衔接痕迹,存在边缘效应,所以需要特定的处理解决这种不自然。这时候可以采用blending方法。multi-band blending是目前图像融和方面比较好的方法。
二、代码
# -*- coding: utf-8 -*-
from pylab import *
from numpy import *
from PIL import Image
# If you have PCV installed, these imports should work
from PCV.geometry import homography, warp
from PCV.localdescriptors import sift
np.seterr(invalid='ignore')
"""
This is the panorama example from section 3.3.
"""
# set paths to data folder
featname = ['C:\Python\Pictrue/apap/pic' + str(i + 1) + '.sift' for i in range(5)] # 图片路径记得修改
imname = ['C:\Python\Pictrue/apap/pic' + str(i + 1) + '.jpg' for i in range(5)]
# extract features and match
l = {
}
d = {
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2115
2115

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









