




 本文分析了基于MIL的检测器在弱监督对象检测中的不稳定性,并提出通过融合不同初始化的检测器结果来提高检测性能。文章介绍了多分支框架、在线融合策略(SCS)和正交初始化方法,旨在利用不稳定性达到类似集成学习的效果,提升检测准确性。
本文分析了基于MIL的检测器在弱监督对象检测中的不稳定性,并提出通过融合不同初始化的检测器结果来提高检测性能。文章介绍了多分支框架、在线融合策略(SCS)和正交初始化方法,旨在利用不稳定性达到类似集成学习的效果,提升检测准确性。
文章目录
论文笔记(九):Utilizing the Instability inWeakly Supervised Object Detection
---------------------------------分割线--------------------------------
艾米拜可
---------------------------------分割线--------------------------------
这篇文章来自CVPR2019,仍旧是一篇弱监督检测的文章,和ICCV上的C-MIDN(之后会补上博客)来自同一位作者,其思路也都相似,都是想利用多实例检测器来进行融合以达到更好的效果,相较于C-MIDN,这篇文章的实现更为简单(没有用到语义分割信息),原理也更好理解。
MIDN的不稳定性
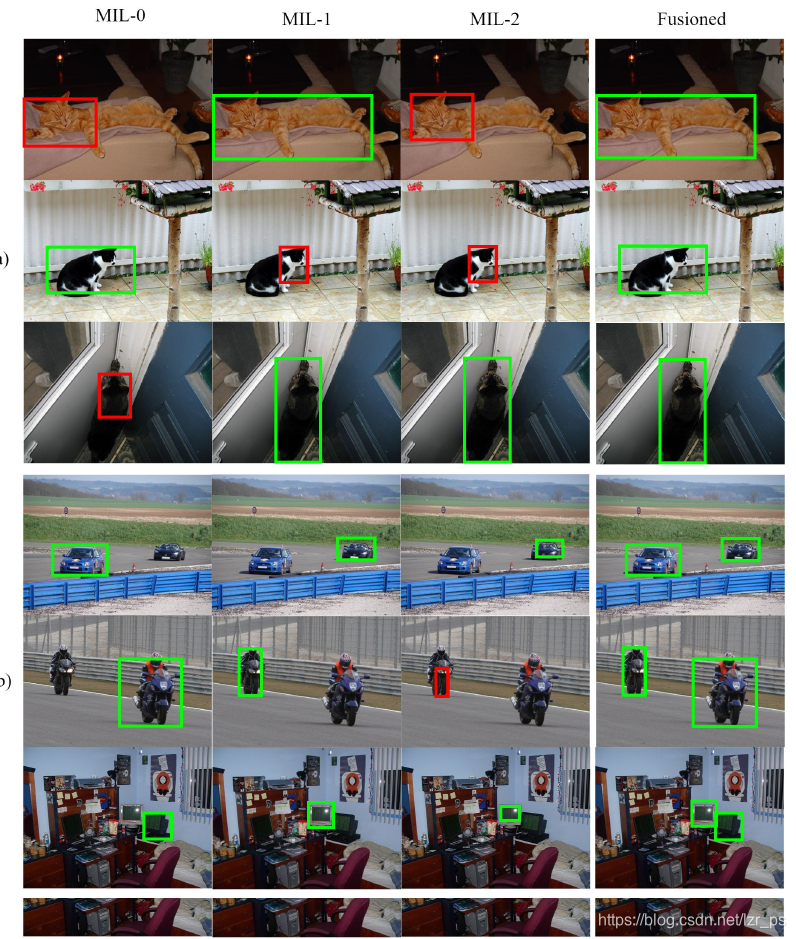 作者在实验中发现如果对相同的MIDN模型进行不同的初始化,其检测结果会有很大变化,如上图所示,即使在本次MIDN中陷入了局部最优的图片,在给与了不同的初始化之后就能正常检测到完整的物体。作者称此为MIDN的不稳定性,为了定量分析这一不稳定性,作者定义了一种度量标准:不一致检测率(IDR),代表两个检测器结果的不一致性。
作者在实验中发现如果对相同的MIDN模型进行不同的初始化,其检测结果会有很大变化,如上图所示,即使在本次MIDN中陷入了局部最优的图片,在给与了不同的初始化之后就能正常检测到完整的物体。作者称此为MIDN的不稳定性,为了定量分析这一不稳定性,作者定义了一种度量标准:不一致检测率(IDR),代表两个检测器结果的不一致性。
不一致检测率(IDR) :在图像中,若两个检测器的某一类的最高得分边框的IOU<0.5,则表示该图像该类上的结果不一致,而不一致检测率即为两个检测器在测试集上该类的结果不一致率。 I D R ∗ c = ∣ { I k c , w h e r e I o U ( b 1 , k c , b 2 , k c ) < 0.5 } ∣ ∣ { I k c } ∣ , IDR*c=\frac{|\{I_k^c,where IoU(b^c_{1,k},b^c_{2,k})<0.5\}|}{|\{I_k^c\}|}, IDR∗c=∣{
Ikc}∣∣{
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1388
1388

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









