






 本文介绍了动态规划中的记忆化策略,通过斐波那契数列、最大路径和、台阶问题和最长上升子序列等实例,阐述了如何在遇到求解方案数、最小代价或最大价值问题时使用动态规划,以及状态转移方程的构建和优化过程。
本文介绍了动态规划中的记忆化策略,通过斐波那契数列、最大路径和、台阶问题和最长上升子序列等实例,阐述了如何在遇到求解方案数、最小代价或最大价值问题时使用动态规划,以及状态转移方程的构建和优化过程。
目录
理解记忆化
动态规划的底层逻辑思想是记忆化 ,就是说对于重复的过程不再进行重复计算,并且有时候仅通过贪心不能够实现结果最优,此时就需要用到动态规划来解决。
下面是记忆化的斐波那契数列的解法,如果单用递归可能50往后的数就难以快速得出结果了,但是记忆化5000也是可以快速得出结论的。
#include <bits/stdc++.h>
using namespace std;
using ll = long long;
const ll p = 1e9 + 7;
const int N = 1e5 + 3;
ll dp[N];
ll f(int n)
{
if (n <= 2) return 1;
if (dp[n] != -1) return dp[n];
return dp[n] = (f(n - 1) + f(n - 2)) % p;
}
int main()
{
memset(dp, -1, sizeof dp);
int n;
cin >> n;
cout << f(n) << '\n';
return 0;
}什么时候用DP
当一般题中出现有方案数/最小代价/最大价值,可以考虑使用。
状态是dp[i][j] 的取值,状态转移是状态与状态之间的转移关系,转移方向表示了迭代或递归方向。
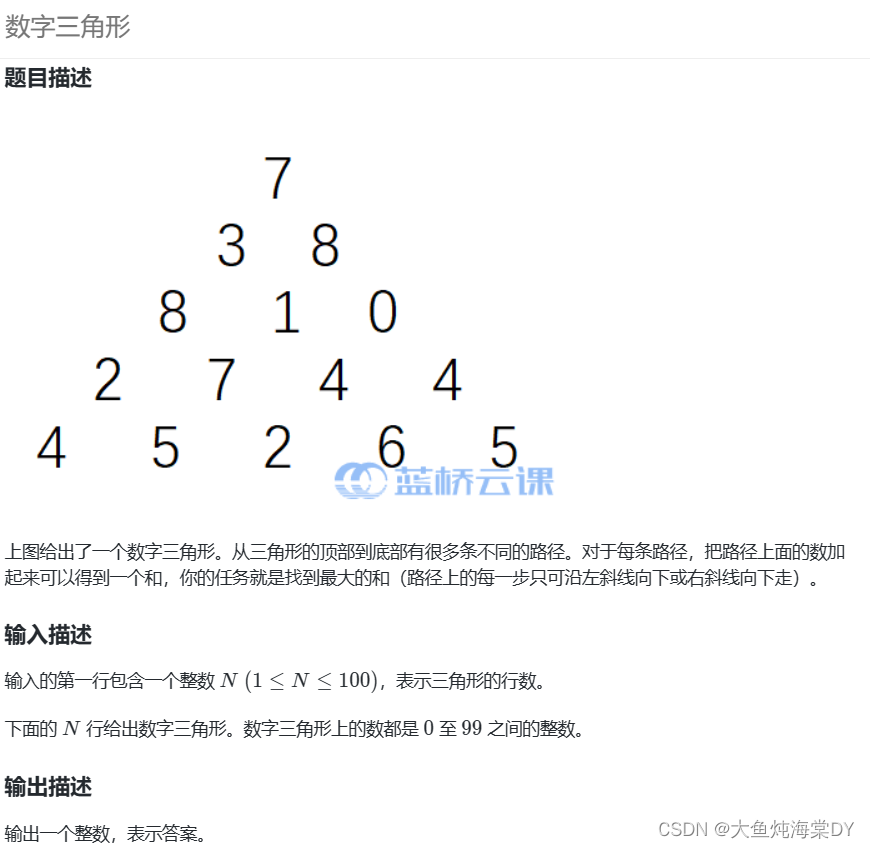
题解:设状态dp[ i ][ j ] 表示从第i行第j列的元素往下走的所有路径当中最大的和,这代码当中 dp[ i ][ j ] 就是在维护最大的和 ,最后输出dp[1][1]。
我最初没想明白为什么是dp[1][1],因为从下往上遍历,且每次取的都是最大值,到最上边就剩下一个dp[1][1],所以就是最大值了。
#include<bits/stdc++.h>
using namespace std;
using ll = long long;
const int N = 150;
ll a[N][N], dp[N][N];
int main()
{
int n;cin >> n;
for (int i = 1; i <= n ; i++)
for (int j = 1; j <= i; j ++) cin >> a[i][j];
for (int i = n ; i >= 1; i --)
for (int j = 1; j <= i; j ++)
//状态转移方程
dp[i][j] = a[i][j] + max(dp[i + 1][j], dp[i + 1][j + 1]);
cout << dp[1][1];
return 0;
}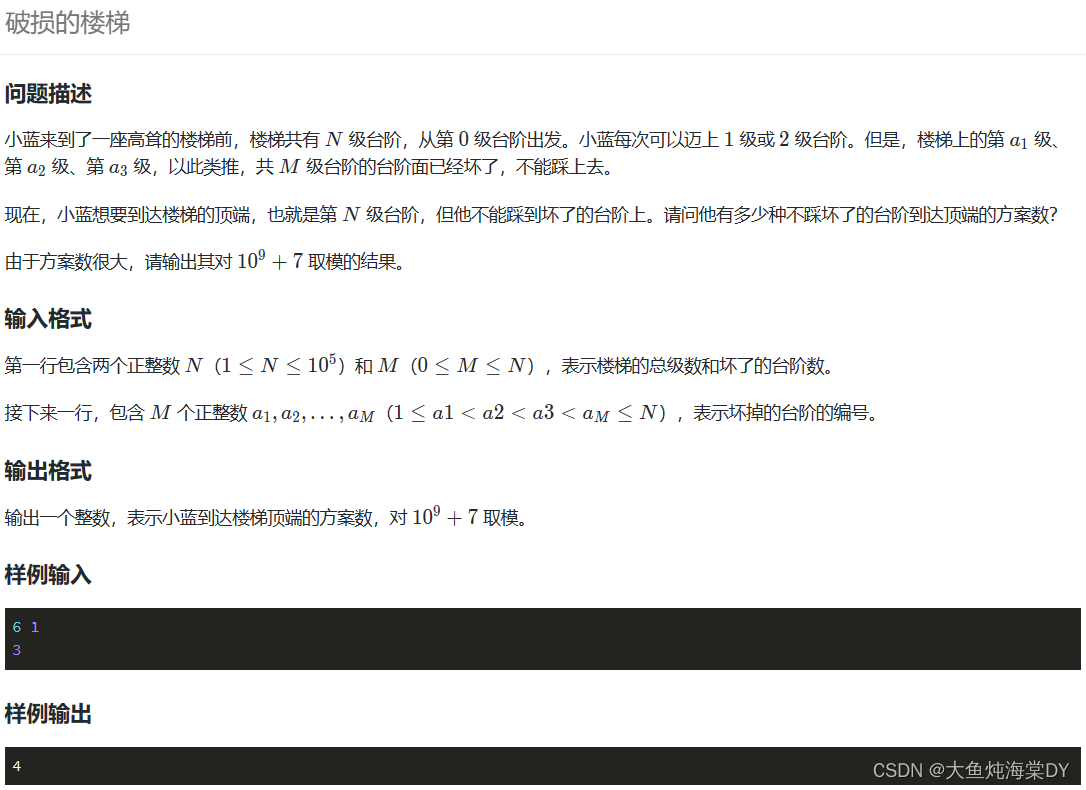
设状态dp[ i ] 表示走到底i级台阶,注意有一个0级台阶
状态转移方程为dp[ i ] = dp[ i - 1 ] + dp[ i - 2 ] ,若果i为破损的,则dp[ i ] = 0
用一个桶来记录那些位置是破损的
从前往后更新,最后输出dp[ n ]
注意零级台阶的初始值是1
#include <bits/stdc++.h>
using namespace std;
using ll = long long;
const int N = 1e5 + 9;
const ll p = 1e9 + 7;
ll dp[N];
bool broken[N];
int main()
{
int n, m;cin >> n >> m;
for (int i = 1; i <= m; i ++)
{
int x;cin >> x;
broken[x] = true;
}
dp[0] = 1;
if (!broken[1]) dp[1] = 1;
for (int i = 2; i <= n; i ++)
{
if (broken[i]) continue;
dp[i] = (dp[i - 1] + dp[i - 2]) % p;
}
cout << dp[n];
return 0;
}
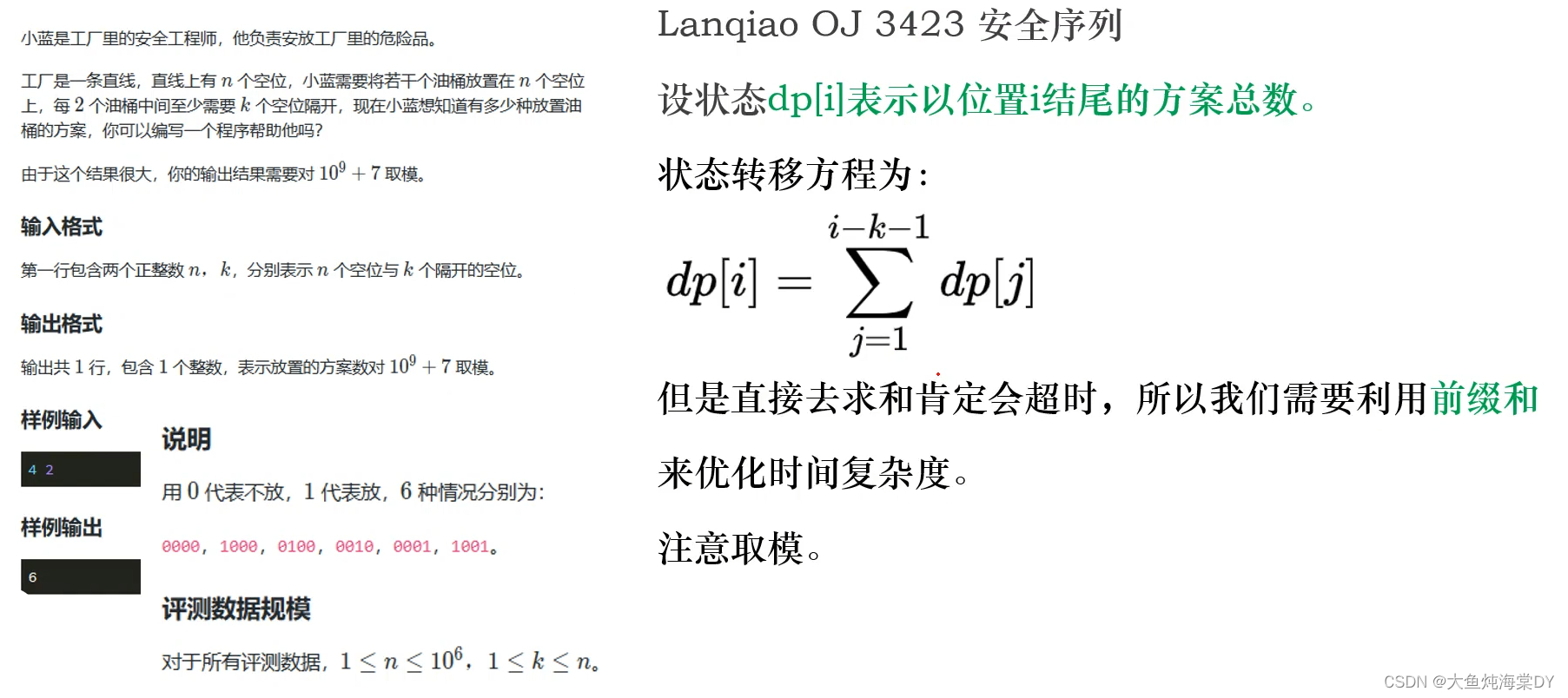
i - k - 1的意思是说这个数距上一个数的距离大于1的话,就说明还存在这样一个数可行就能继续往下走,否则结束。
#include<bits/stdc++.h>
using namespace std;
const int N = 1e6 + 9;
const int p = 1e9 + 7;
int prefix[N], dp[N];
int main()
{
int n,k;cin >> n >> k;
dp[0] = prefix[0] = 1;
for (int i = 1; i <= n; i ++)
{
if (i - k - 1 < 1) dp[i] = 1;
else dp[i] = prefix[i - k - 1];
prefix[i] = (prefix[i - 1] + dp[i]) % p;
}
cout << prefix[n] << '\n';
return 0;
}
















 1714
1714

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









