







 本文探讨了基于改进PFPN网络的语义地图构建方法,涉及2D和3D语义分割技术,以及在无人驾驶中的应用。通过与多种模型对比,选择了ResNet-50-1×的PFPN作为视觉语义分割核心,并介绍了多模态数据融合策略。实验在COCO数据集上进行,验证了模型的分割性能。
本文探讨了基于改进PFPN网络的语义地图构建方法,涉及2D和3D语义分割技术,以及在无人驾驶中的应用。通过与多种模型对比,选择了ResNet-50-1×的PFPN作为视觉语义分割核心,并介绍了多模态数据融合策略。实验在COCO数据集上进行,验证了模型的分割性能。
(一)相关研究
-
2D语义分割(semantic segmentation)
- 使用马尔可夫随机场(MRF)和条件随机场(CRF)等概率模型进行语义分割;
- CNN方法——FCN:引入了一种称为转置卷积层的上采样层,可以在保留了原始输入图像空间信息的同时进行逐像素分类;
- 以FCN为基础的衍生网络结构:ENET 、 SegNet 、 DilatedNet 和 RefineNet 等。
- PFPN网络结构:可以使用同时生成基于区域的输出和密集像素输出的单个网络来提高实例分割和语义分割的准确性。
-
3D语义分割
- 基于高线束激光雷达:用于三维语义分割的改进二维卷积神经网络(CNN)结构: PointNet 和 SEGCloud ;
- YOLOv3 结合视觉 SLAM 构建语义地图;
(二)具体实现
-
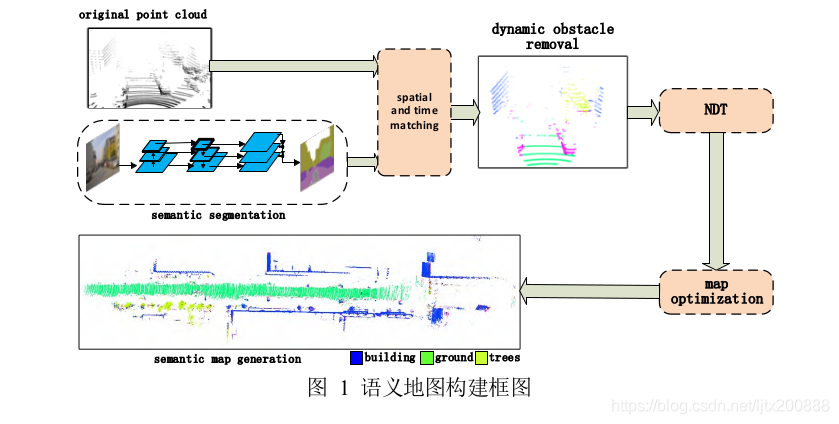
主要流程
分为语义分割与点云获取、多模态数据融合和 NDT 建图与优化三个模块,首先通过改进的 PFPN 网络实现的园区场景视觉语义分割,然后将语义分割数据与点云数据通过空间匹配和时间匹配的方式进行数据融合,使得点云具有了语义信息,在建图过程中通过语义信息将其中的动态障碍物去除进行语义地图的优化,从而达到语义的建立并提高建图精度与速度。
-
视觉语义分割
主要模
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









