




提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
排序算法
排序算法是《数据结构与算法》中最基本的算法之一。
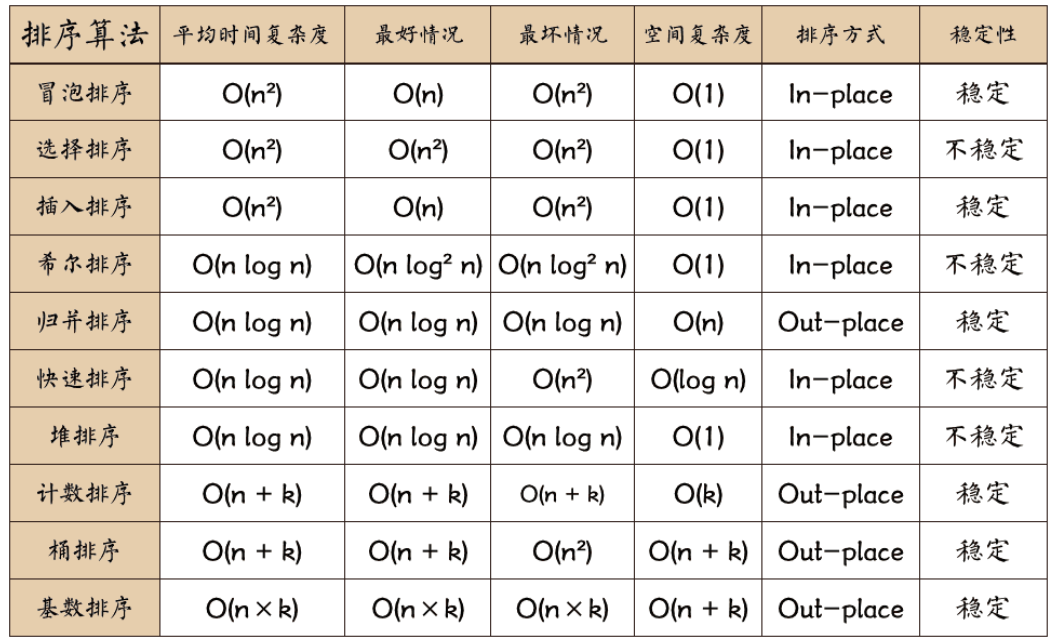
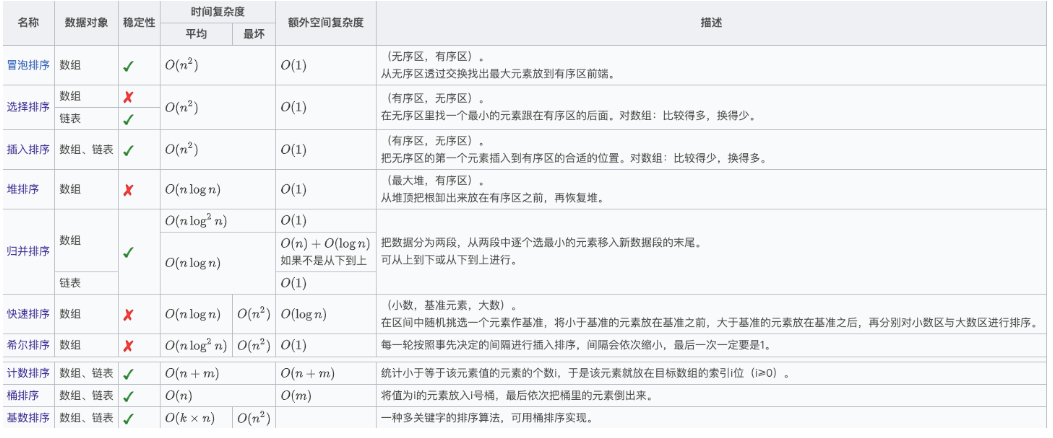
排序算法可以分为内部排序和外部排序,内部排序是数据记录在内存中进行排序,而外部排序是因排序的数据很大,一次不能容纳全部的排序记录,在排序过程中需要访问外存。常见的内部排序算法有:插入排序、希尔排序、选择排序、冒泡排序、归并排序、快速排序、堆排序、基数排序等。用一张图概括:
 关于时间复杂度:
关于时间复杂度:
平方阶 (O(n2)) 排序 各类简单排序:直接插入、直接选择和冒泡排序。
线性对数阶 (O(nlog2n)) 排序 快速排序、堆排序和归并排序;
O(n(1+§)) 排序,§ 是介于 0 和 1 之间的常数。 希尔排序
线性阶 (O(n)) 排序基数排序,此外还有桶、计数排序。
关于稳定性:
稳定的排序算法:冒泡排序、插入排序、归并排序和基数排序。
不是稳定的排序算法:选择排序、快速排序、希尔排序、堆排序。
名词解释:
- n:数据规模
- k:"桶"的个数
- In-place:占用常数内存,不占用额外内存
- Out-place:占用额外内存
- 稳定性:排序后 2 个相等键值的顺序和排序之前它们的顺序相同
按排序依据原则:
插入排序:直接插入排序、折半插入排序、希尔排序
交换排序:冒泡排序、快速排序
选择排序:简单选择排序、堆排序
归并排序:2-路归并排序、多路归并排序
基数排序、计数排序、桶排序
一、插入排序
基本思想:每步将一个待排序的对象,按其关键码大小,插入到前面已经排好序的一组对象的适当位置上,直到对象全部插入为止。
即边插入边排序,保证子序列随时都是排好序的。
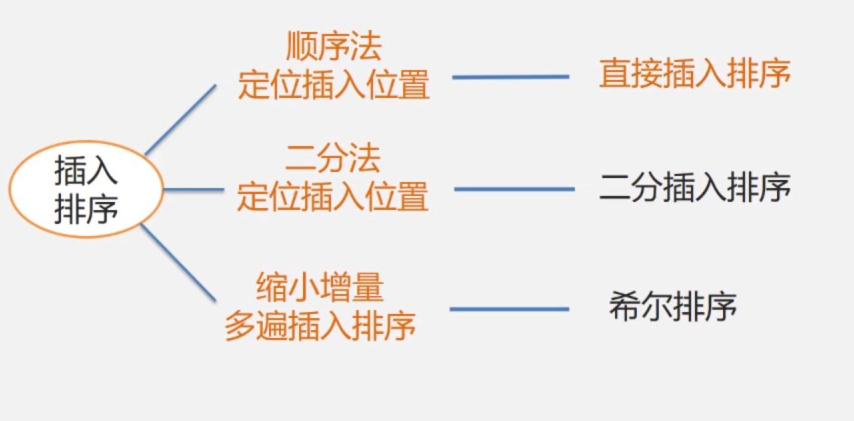
直接插入排序
直接插入排序——采用顺序查找法查找插入位置
#include<iostream>
using namespace std;
void insertion_sort(int arr[],int len){
int i,j;
for(int i=1;i<len;i++){
if(arr[i]<arr[i-1]){
int key = arr[i];
for(j=i-1;j>=0 && key<arr[j];--j){
arr[j+1]=arr[j];
}
arr[j+1]=key;
}
}
}
void printarr(int arr[],int len){
for(int i=0;i<len;i++){
cout<<arr[i]<<' ';
}
cout<<endl;
}
int main(){
int arr[] = {
61, 17, 29, 22, 34, 60, 72, 21, 50, 1, 62 };
int len = sizeof(arr)/sizeof(arr[0]);
insertion_sort(arr,len);
printarr(arr,len);
return 0;
}
折半插入排序
#include<iostream>
using namespace std;
void half_insertion_sort(int arr[],int len){
int i,j;
for(int i=1;i<len;i++){
int key=arr[i];
if(arr[i]>arr[i-1]){
arr[i] = key;
}else{
int low = 0;int high = i-1;
while(low<=high){
int mid = low+(high-low)/2;
if(key<arr[mid]){
high = mid-1;
}else{
low = mid+1;
}
}
for(j=i-1;j>=high+1;--j) arr[j+1]=arr[j];
arr[high+1]=key;
}
}
}
void printarr(int arr[],int len){
for(int i=0;i<len;i++){
cout<<arr[i]<<' ';
}
cout<<endl;
}
int main(){
int arr[] = {
61, 17, 29, 22, 34, 60, 72, 21, 50, 1, 62 };
int len = sizeof(arr)/sizeof(arr[0]);
half_insertion_sort(arr,len);
printarr(arr,len);
return 0;
}
希尔排序
希尔排序的基本思想是:先将整个待排序的记录序列分割成为若干子序列分别进行直接插入排序,待整个序列中的记录"基本有序"时,再对全体记录进行依次直接插入排序。
特点:
- 缩小增量
- 多遍插入排序
算法步骤
选择一个增量序列 t1,t2,……,tk,其中 ti > tj, tk = 1;
按增量序列个数 k,对序列进行 k 趟排序;
每趟排序,根据对应的增量 ti,将待排序列分割成若干长度为 m 的子序列,分别对各子表进行直接插入排序。仅增量因子为 1 时,整个序列作为一个表来处理,表长度即为整个序列的长度。
#include<iostream>
using namespace std;
void shellinsert(int arr[],int dk,int length){
//dk:增量值
int i,j;
// int size = sizeof(arr)/sizeof(arr[0]); arr做函数参数,传的是数组的地址,所以不在函数内部使用sizeof
//对顺序表arr进行一趟增量为dk的shell排序,dk为步长因子
for(i=dk;i<length;i++){
if(arr[i]<arr[i-dk]){
int key = arr[i];
for(j=i-dk;j>=0&&(key<arr[j]);j=j-dk){
arr[j+dk]=arr[j];
}
arr[j+dk]=key;
}
}
}
void shellsort(int arr[],int dlta[],int t,int length){
//arr:待排序数组,dlta:增量数组,t:增量数组元素个数,length:待排序数组长度
//按增量序列dlta[0...t-1]对顺序表作希尔排序
for(int i=0;i<t;i++){
shellinsert(arr,dlta[i],length);//一趟增量为dlta[i]的插入排序
}
}
void printarr(int arr[],int len){
for(int i=0;i<len;i++){
cout<<arr[i]<<' ';
}
cout<<endl;
}
int main(){
int arr[] = {
61, 17, 29, 22, 34, 60, 72, 21, 50, 1, 62 };
int dlta[] = {
5,3,1};
int t = sizeof(dlta)/sizeof(dlta[0]);
int len = sizeof(arr)/sizeof(arr[0]);
shellsort(arr,dlta,t,len);
printarr(arr,len);
return 0;
}
希尔排序算法效率与增量序列的取值有关。
希尔排序法是一种不稳定的排序算法。
二、交换排序
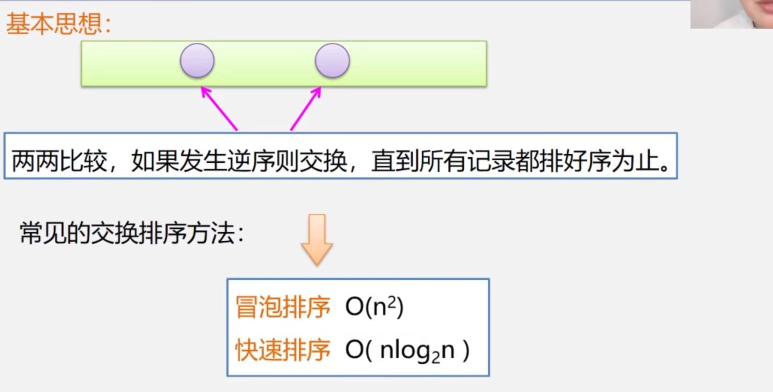
冒泡排序
算法步骤
比较相邻的元素。如果第一个比第二个大,就交换他们两个。冒泡一趟,一个最大数就升上去了,经常n-1趟后全部元素就排序好了。
#include<iostream>
using namespace std;
void bubble_sort(int arr[],int length){
int i,j;
for 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4220
4220

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









