







 3D图形旋转有矩阵、欧拉角和四元数三种表示方法,本文重点介绍欧拉角heading - pitch - bank。heading角绕y轴转,pitch角绕x轴转,bank角绕z轴转,其表示旋转直观简洁,但会产生万向锁问题,如pitch角为正负90度时受限。
3D图形旋转有矩阵、欧拉角和四元数三种表示方法,本文重点介绍欧拉角heading - pitch - bank。heading角绕y轴转,pitch角绕x轴转,bank角绕z轴转,其表示旋转直观简洁,但会产生万向锁问题,如pitch角为正负90度时受限。
3D图形的旋转,有三种表示方法:矩阵,欧拉角和四元数。
本文将重点介绍欧拉角heading-pitch-bank(又名roll - pitch - yaw)。
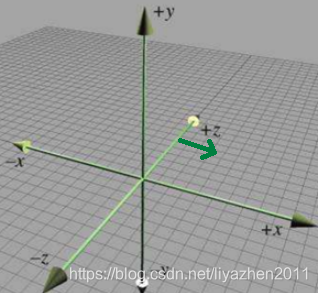
1.heading角
绕y轴转动一定的角度。
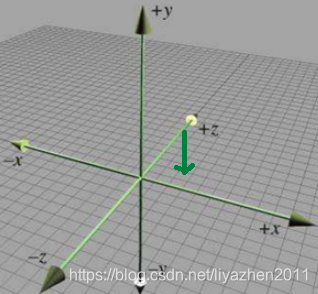
2.pitch角
绕x轴转动一定的角度。
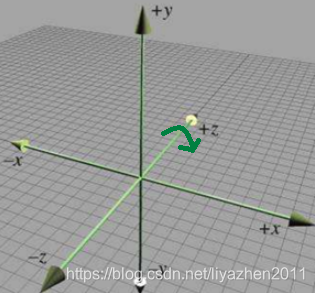
3.bank角
绕z轴转动一定的角度。
欧拉角表示旋转直观简洁(旋转矩阵表示需要9个数字,四元数需要4个数字,欧拉角需要3个角度即可)。但是欧拉角会产生万向锁问题。
万向锁
一旦选择pitch角为正负90度,就被限制只能绕垂直轴旋转。欧拉角在插值过程中可能会碰到万向锁问题。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









