



EtherCAT从站只有在OP状态才能使用RxPDO与主站通信
最新推荐文章于 2025-10-28 20:03:11 发布
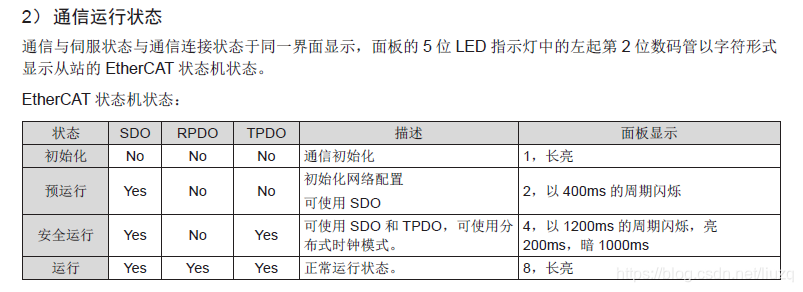
 博客指出EtherCAT站站只有处于OP状态时,才能够使用RxPDO与主站进行通信,强调了站站状态与通信的条件关系。
博客指出EtherCAT站站只有处于OP状态时,才能够使用RxPDO与主站进行通信,强调了站站状态与通信的条件关系。
博客指出EtherCAT站站只有处于OP状态时,才能够使用RxPDO与主站进行通信,强调了站站状态与通信的条件关系。
博客指出EtherCAT站站只有处于OP状态时,才能够使用RxPDO与主站进行通信,强调了站站状态与通信的条件关系。
 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























