




 本文详细介绍了Python中位置式和增量式PID控制的实现,并通过代码示例展示了如何调整参数以优化控制效果。此外,提供了PID调试口诀帮助理解参数调整策略。
本文详细介绍了Python中位置式和增量式PID控制的实现,并通过代码示例展示了如何调整参数以优化控制效果。此外,提供了PID调试口诀帮助理解参数调整策略。
PID控制常用的简单分为位置式和增量式。
位置式PID
是输入的是目标位置到实际位置的偏差,输出的是(电机的)目标速度。
增量式PID控制.
数字PID控制算法的一种基本形式,是通过对控制量的增量(本次控制量和上次控制量的差值)进行PID控制的一种控制算法。
增量式PID控制
1、位置式
别的不说附上源代码,我用的是Python3,前提你得装上matplotlib这个库,这个库可以非常清楚的绘制数据的曲线图。如果不装的话可以返回一个列表
import matplotlib.pyplot as plt
class Pid():
"""这里定义了一个关于PID的类"""
def __init__(self, exp_val, kp, ki, kd):
self.KP = kp
self.KI = ki
self.KD = kd
self.exp_val = exp_val
self.now_val = 0
self.sum_err = 0
self.now_err = 0
self.last_err = 0
def cmd_pid(self):
self.last_err = self.now_err
self.now_err = self.exp_val - self.now_val
self.sum_err += self.now_err
# 这一块是严格按照公式来写的
self.now_val = self.KP * (self.exp_val - self.now_val) \
+ self.KI * self.sum_err + self.KD * (self.now_err - self.last_err)
return self.now_val
pid_val = []
#对pid进行初始化,目标值是1000 ,p=0.1 ,i=0.15, d=0.1
my_Pid = Pid(1000, 0.1, 0.15, 0.1)
# 然后循环100次把数存进数组中去
for i in range(0, 100):
pid_val.append(my_Pid.cmd_pid())
plt.plot(pid_val)
plt.show()
数据图
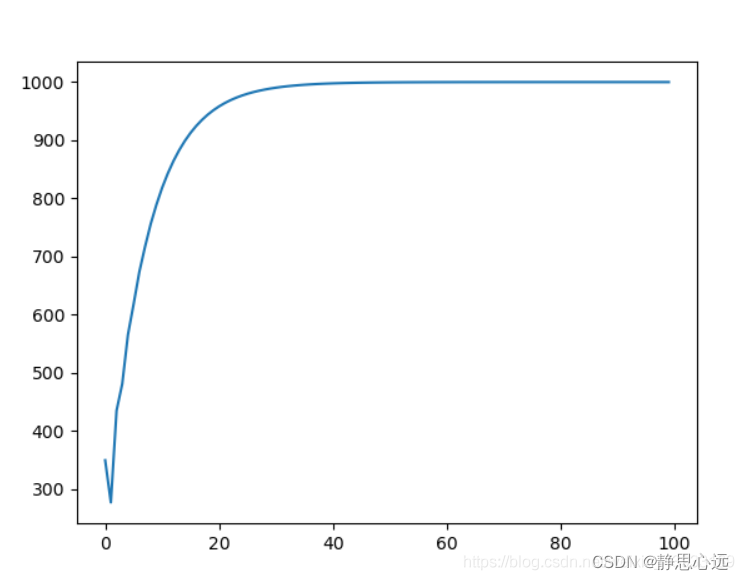
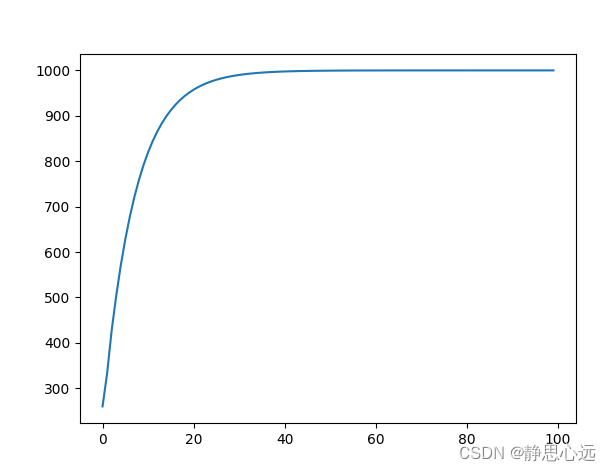
开始处有一个数据不对,把pd从0.1调小为0.01
import matplotlib.pyplot as plt
class Pid():
#这里定义了一个关于PID的类
def __init__(self, exp_val, kp, ki, kd):
self.KP = kp
self.KI = ki
self.KD = kd
self.exp_val = exp_val
self.now_val = 0
self.sum_err = 0
self.now_err = 0
self.last_err = 0
def cmd_pid(self):
self.last_err = self.now_err
self.now_err = self.exp_val - self.now_val
self.sum_err += self.now_err
# 这一块是严格按照公式来写的
self.now_val = self.KP * (self.exp_val - self.now_val) \
+ self.KI * self.sum_err + self.KD * (self.now_err - self.last_err)
return self.now_val
pid_val = []
#对pid进行初始化,目标值是1000 ,p=0.1 ,i=0.15, d=0.1
my_Pid = Pid(1000, 0.1, 0.15, 0.01)
# 然后循环100次把数存进数组中去
for i in range(0, 100):
pid_val.append(my_Pid.cmd_pid())
plt.plot(pid_val)
plt.show()
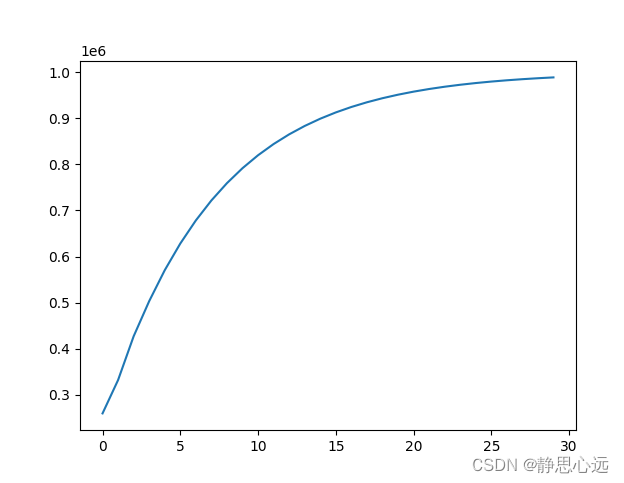
2、增量式

这就是离散化 PID 的增量式表示方式,由公式可以看出,增量式的表达结果和最
近三次的偏差有关,这样就大大提高了系统的稳定性。需要注意的是最终的输出
结果应该为 u(K)+增量调节值;
import matplotlib.pyplot as plt
class Pid():
def __init__(self, exp_val, kp, ki, kd):
self.KP = kp
self.KI = ki
self.KD = kd
self.exp_val = exp_val
self.now_val = 0
self.now_err = 0
self.last_err = 0
self.last_last_err = 0
self.change_val = 0
def cmd_pid(self):
self.last_last_err = self.last_err
self.last_err = self.now_err
self.now_err = self.exp_val - self.now_val
self.change_val = self.KP * (self.now_err - self.last_err) + self.KI * \
self.now_err + self.KD * (self.now_err - 2 * self.last_err
+ self.last_last_err)
self.now_val += self.change_val
return self.now_val
pid_val = []
my_Pid = Pid(1000000, 0.1, 0.15, 0.1)
for i in range(0, 30):
pid_val.append(my_Pid.cmd_pid())
plt.plot(pid_val)
plt.show()
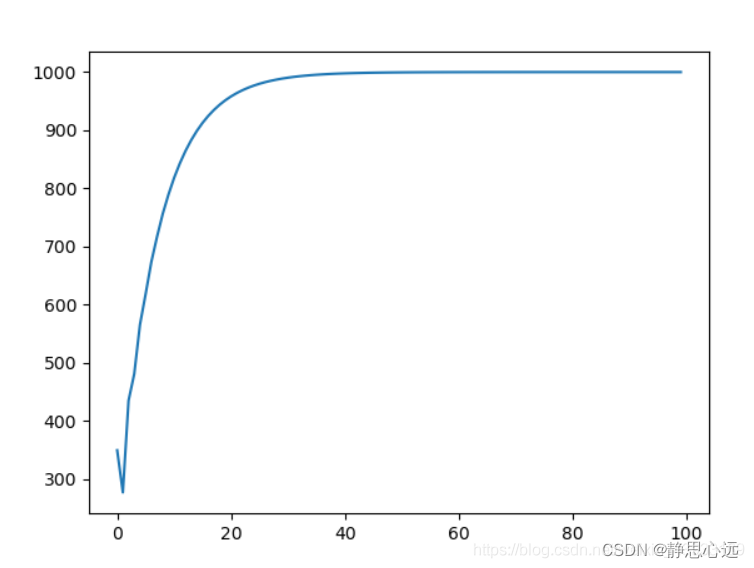
开始处有一个数据不对,把pd从0.1调小为0.01
my_Pid = Pid(1000000, 0.1, 0.15, 0.01)
3、口诀
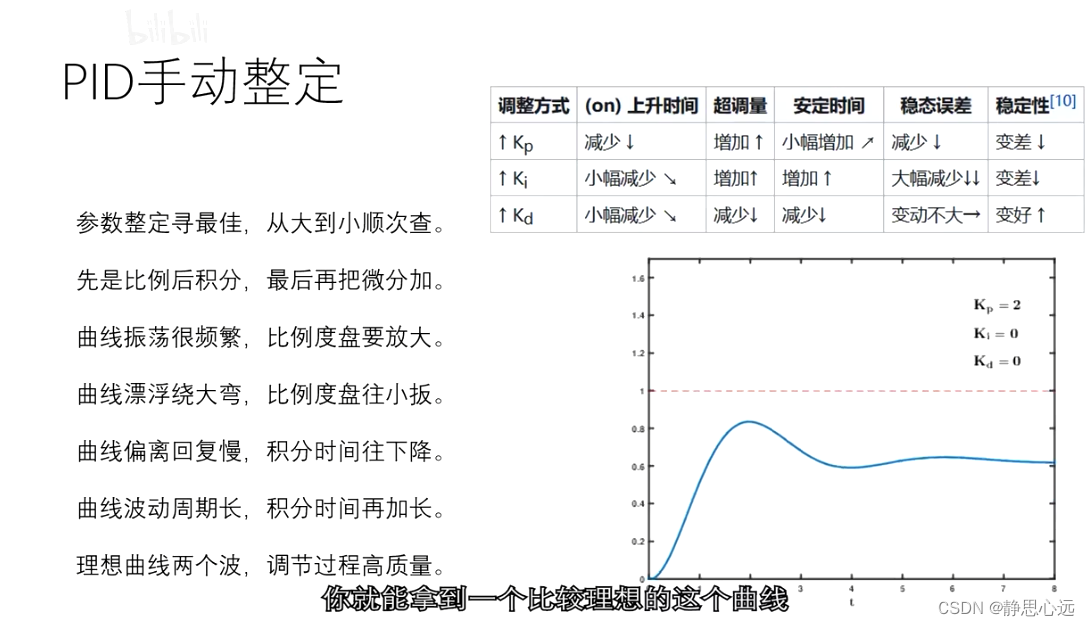
PID调试口诀:
参数整定找最佳, 从小到大顺序查。
先是比例后积分, 最后再把微分加。
曲线振荡很频繁, 比例度盘要放大。
曲线漂浮绕大弯, 比例度盘往小扳。
曲线偏离回复慢, 积分时间往下降。
曲线波动周期长, 积分时间再加长。
曲线振荡频率快, 先把微分降下来。
动差大来波动慢, 微分时间应加长。
理想曲线两个波, 前高后低四比一。
一看二调多分析, 调节质量不会低。




















 1002
1002

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











