






今天我们来实际操作一下,如何使用OptiCalib进行多镜头相机标定,多镜头相机标定在众多领域都有着广泛的应用,如何简单、方便、高效、高精度的完成多镜头内外参数的同步标定,OptiCalib给了一个操作案例。
OptiCalib系统下载地址:OptiCalib链接
一、实验数据
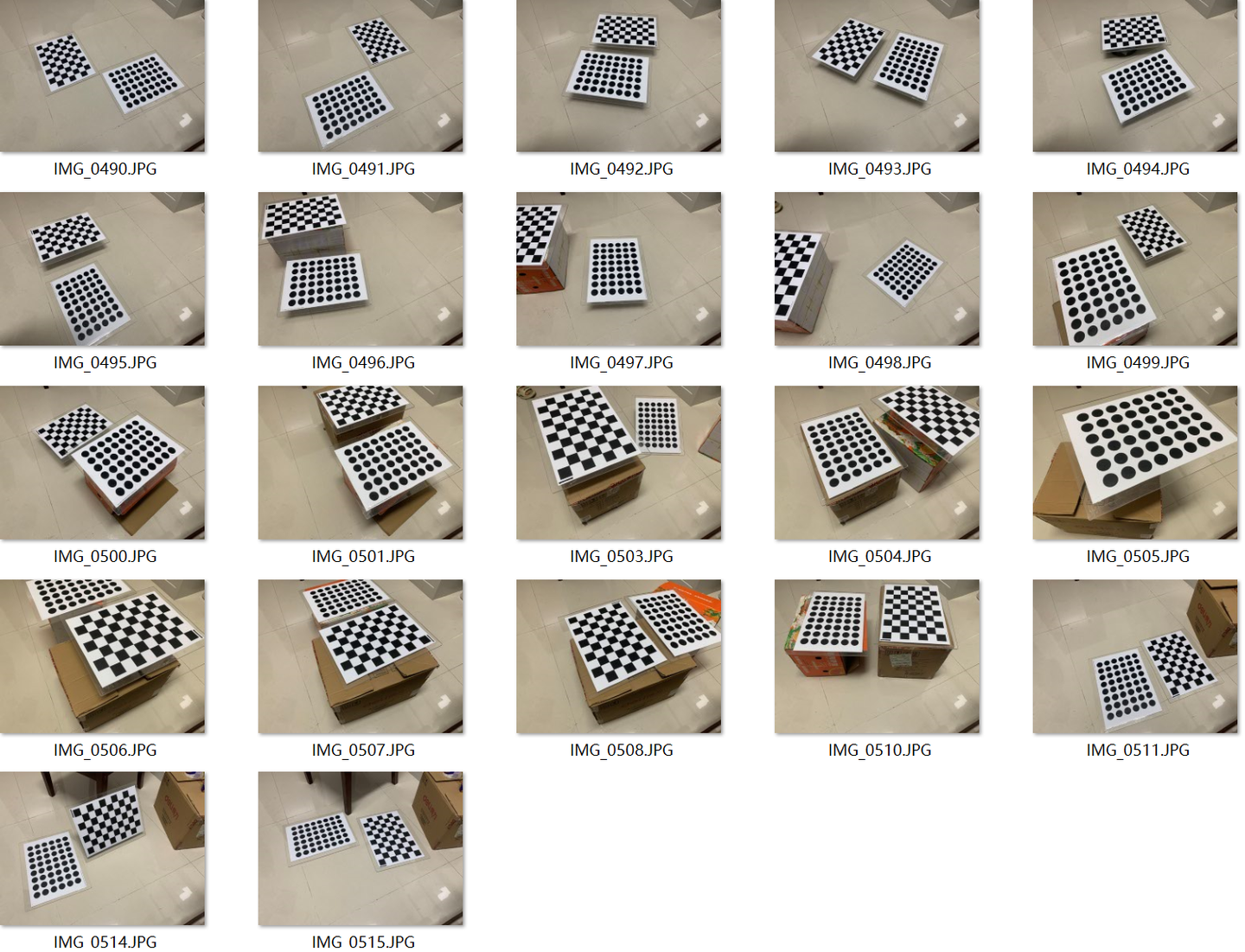
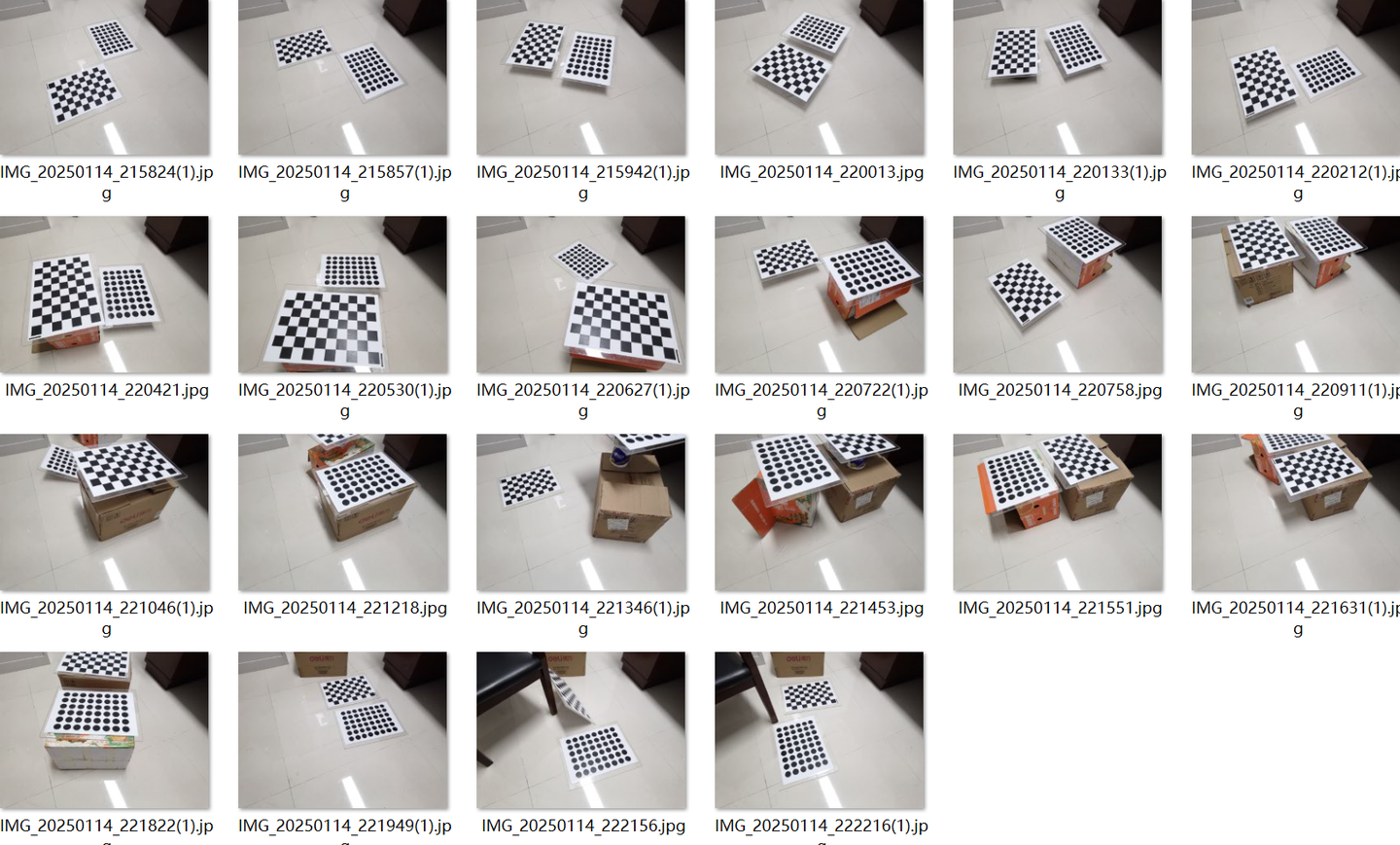
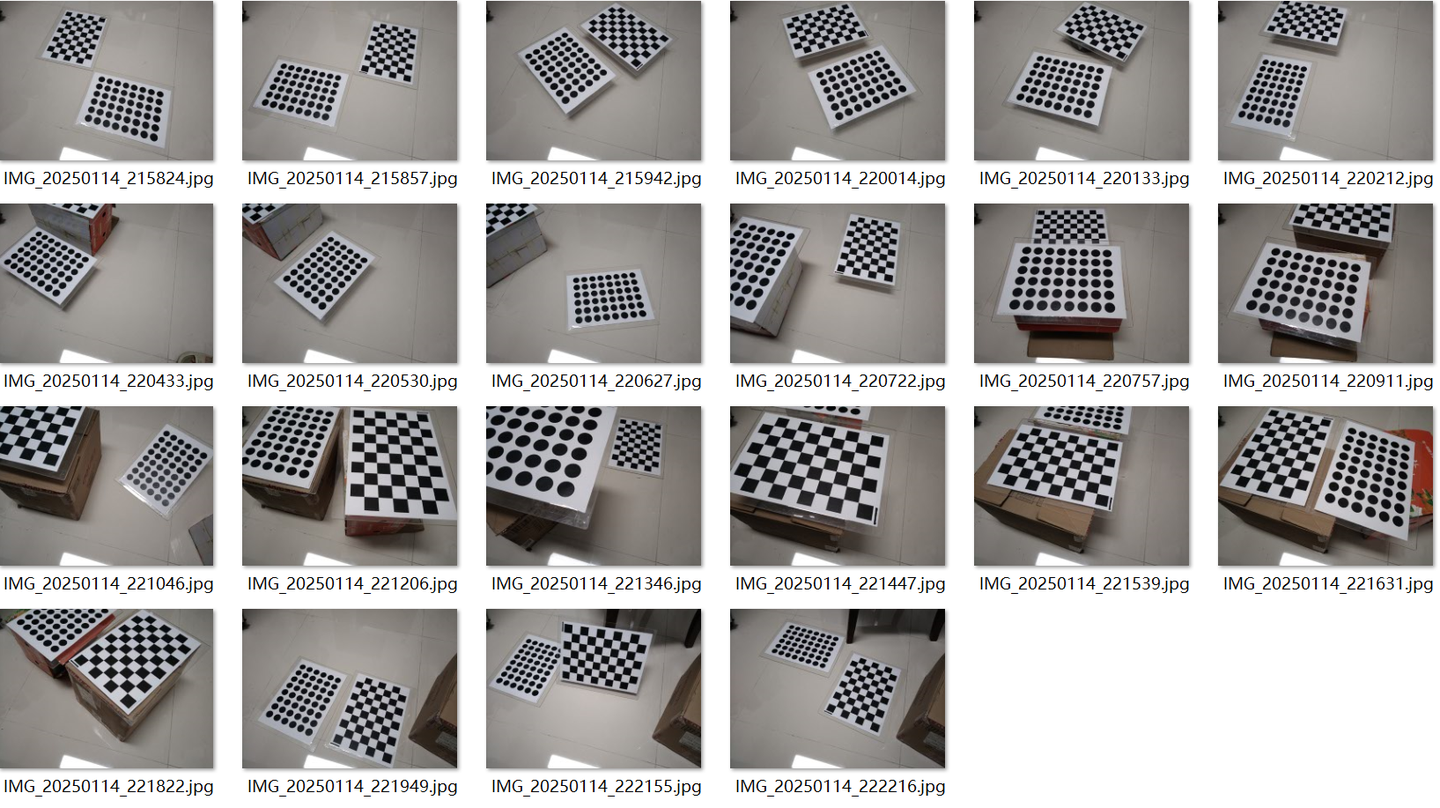
由三镜头组成的多镜头相机系统,拍摄三组图像数据,每个镜头拍摄22张图像共计66张,分辨率分别是:4208x3102,4032x3024,3264x2488,
镜头一:
镜头二:
镜头三:
设置两个标定板,分别是:10X7的棋盘标定板、8x6的圆点标定板。
棋盘标定板:
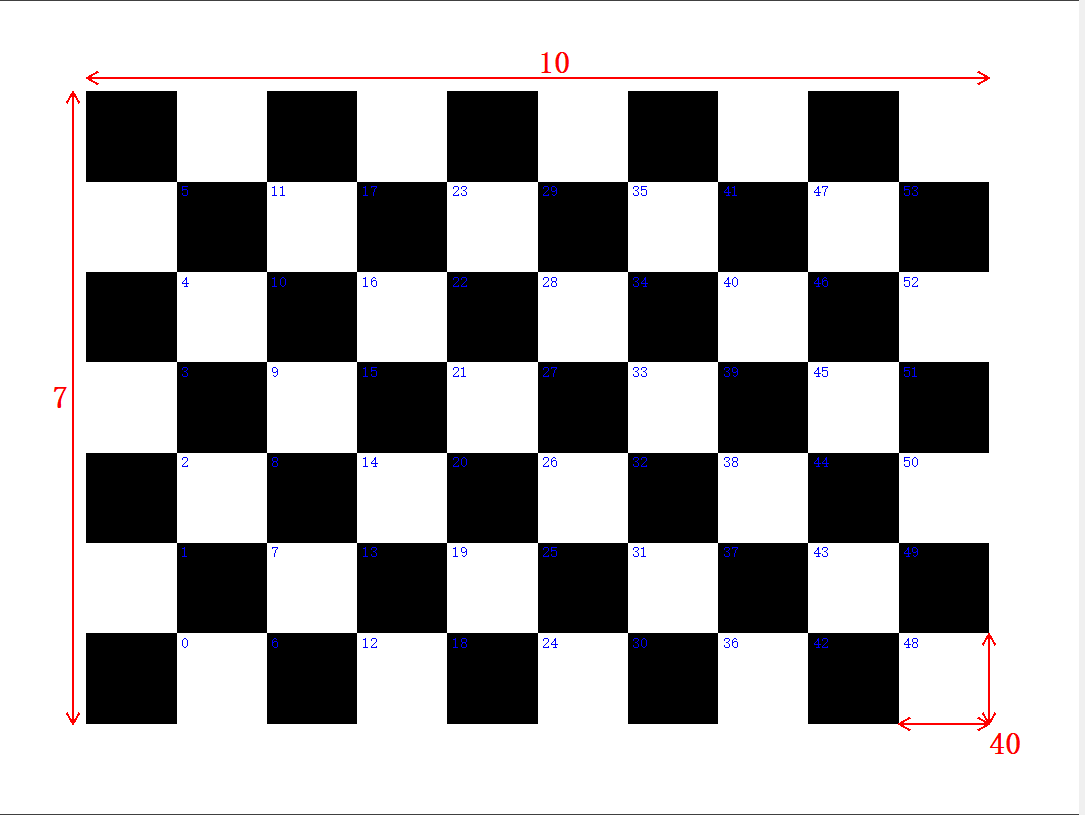
棋盘标定板
圆点标定板:
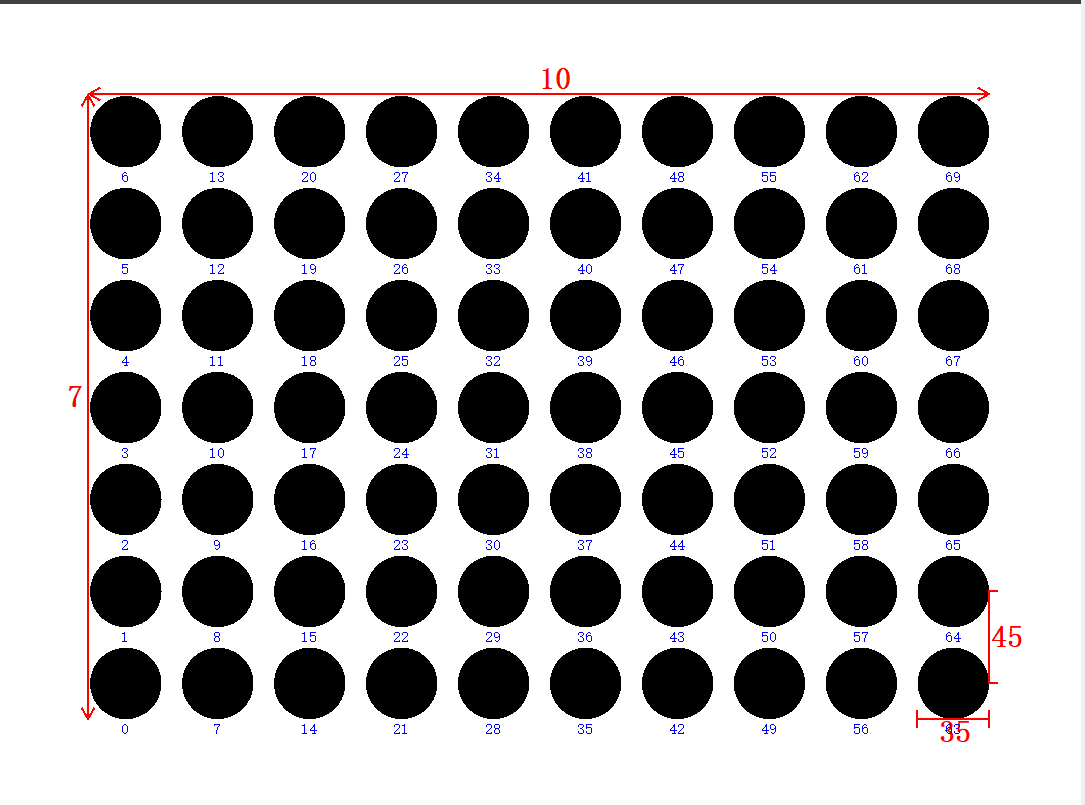
圆点标定板
二、创建工程
创建工程,设置棋盘标定板,加载图像:
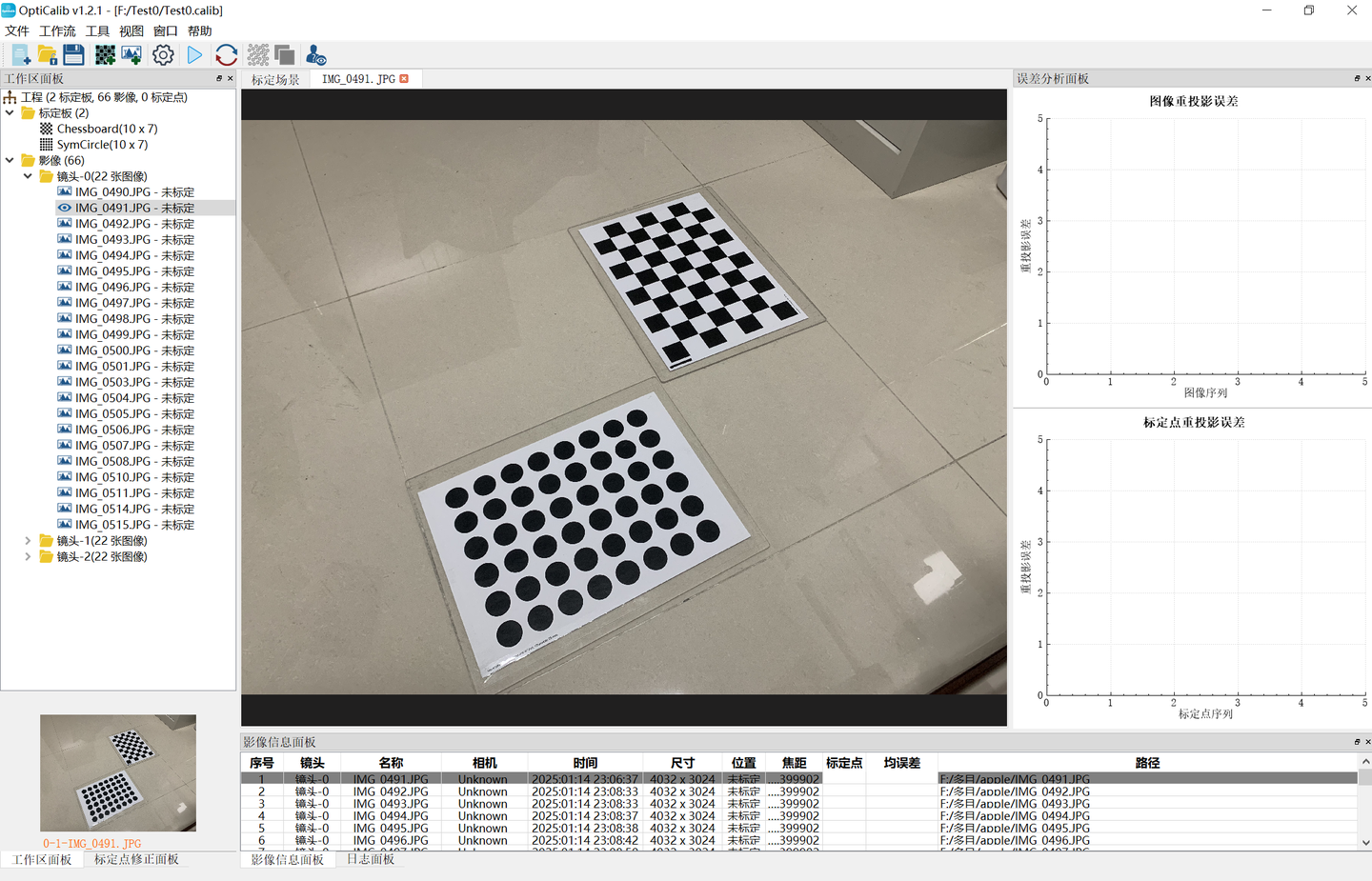
设置标定板、加载图像
设置标定参数,启动相机标定:
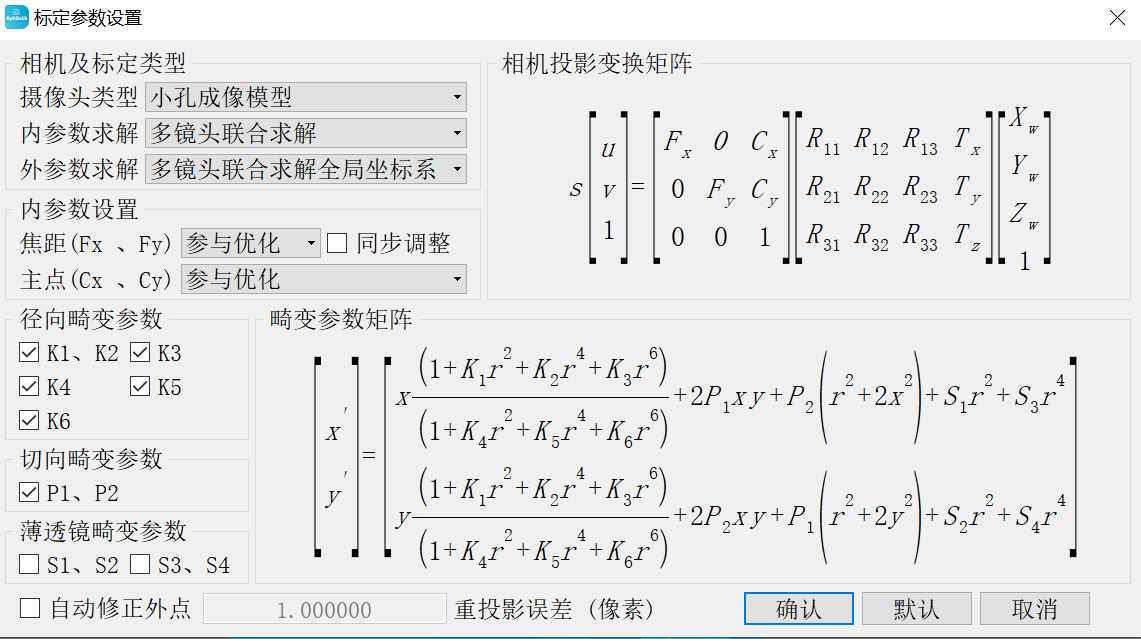
设置标定参数
完成相机标定:
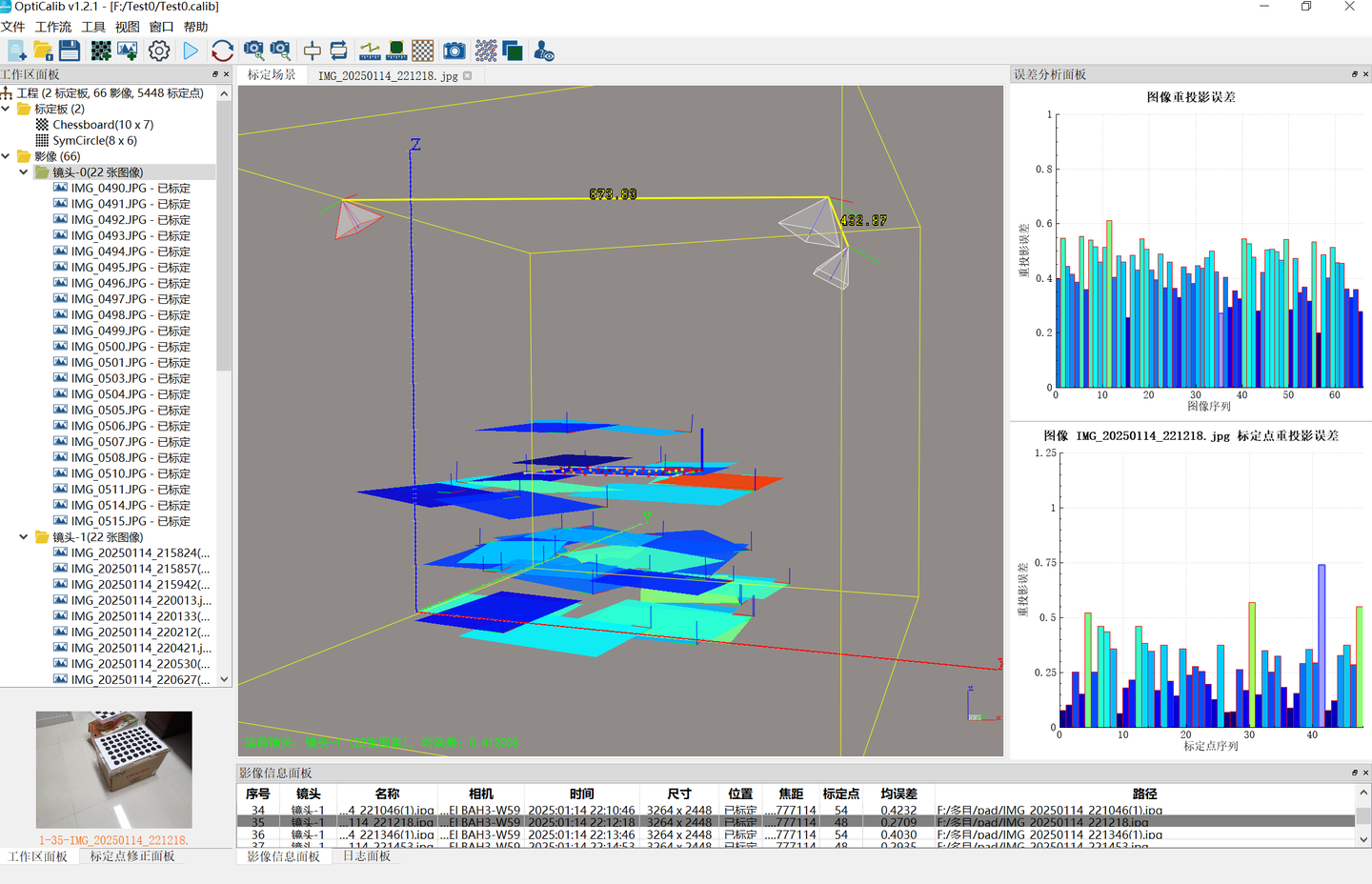
平均重投影误差
第一个镜头重投影均误差0.455813,第二个镜头重投影均误差0.412008,第三个镜头的重投影均误差0.417366,总的重投影均误差0.428766,平均像素大小:0.319545mm/Pixel。
重投影误差分布:
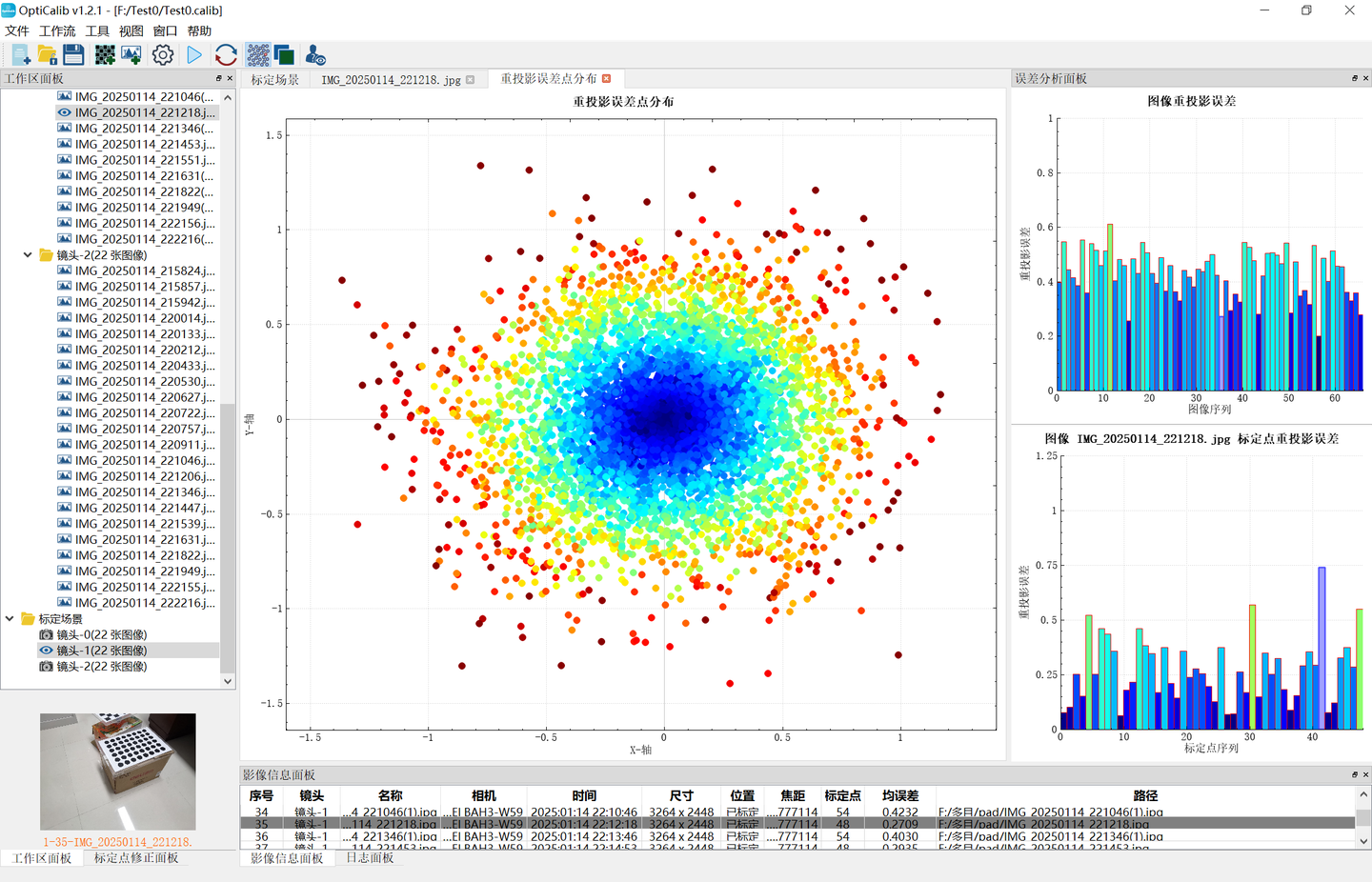
重投影误差分布
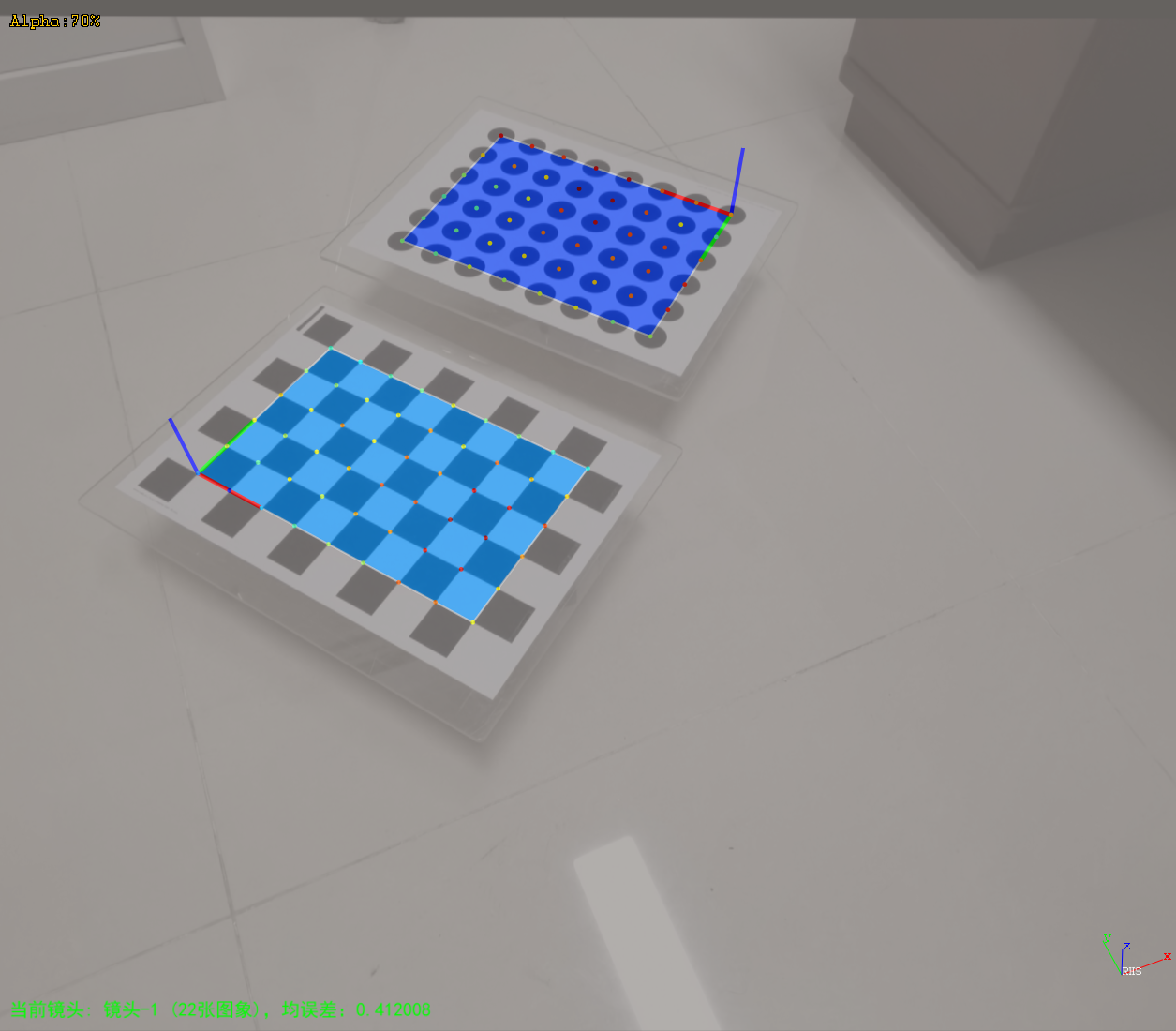
二三维对齐效果
三、结论
OptiCalib完成多镜头相机标定,正确的设置标定板参数,能够自动计算圆点标定板的对齐方向,当出现存在错误的标定点检测结果,需使用软件进行修正后再进行标定,直到视觉上检查不存在错误的标定点,从而通过交互操作实现高精度的相机标定。

















 1231
1231

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









