







1 .免责声明
本篇文章只是对经手过的仿生项目的初略概述以及个人对于如何商业化落地的一些个人见解,只用于心得分享交流。
2.仿生目的
能查到这篇文章的朋友们,大体上应该是仿生相关的或者机器人相关的,专业人士,业余爱好者或者寻求落地项目的单位,所以在此篇文章中,本人会跳过一些基础的信息,只谈心得。
当下仿生种类较多,比如仿生鱼、螃蟹、蝴蝶、蝙蝠等等,大概就是,天上飞的,地上跑的,水里游的,能看到的,只要注意到它具有某一方面特有的技能,都会仿,仿的目的就是研究,分析怎么达到相同的效果,以期能够在一些特殊领域,让机器人能够具有相同技能实现某些作业目的,最直接有效的方式就是仿生。
3.多足的仿生机器人
多足仿生机器人,主要是四足、六足以及八足较多。
1.仿生四足
对于仿生四足机器人,具有代表性的就是柔性躯干的仿猎豹,和刚性躯干的仿牛马等。刚性躯干看重的是其承载负重能力,柔性躯干看重的是其快速性。
足式机器人的优势就是代替轮式机器人在非结构环境中作业,大体上足式机器人的领域就是环境恶劣的的地方,轮式就是占据了规则的环境中,这种平衡一直保持到近年,但是社会啊,发展就是不断打破平衡,破而后立,此处花开两朵,先表一枝。
1.1刚性躯干机器人
日本东京工业大学一直在搞这方向的研究,先后做了好多代,方向一直都是搭建更好的模型用于研究,如图一:
 图一 TITAN-XIII 速度 0.7m/s
图一 TITAN-XIII 速度 0.7m/s
名声比较响就是波士顿动力的研究,波士顿动力研究团队推出名为 wildcat 的四足机器人,如图二:

图二 wildcat
最后看MIT做的,Cheetah 机器人,能够达到 10 英里的时速和 0.33 米的越障高度,如图三:
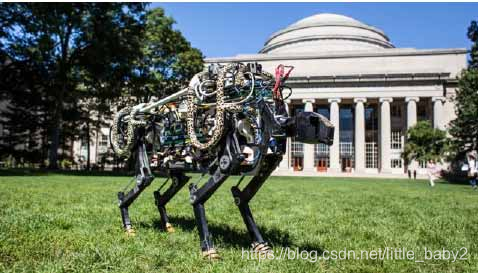
图三 Cheetah
当然国内也有做得很好的,不详细说明,可以列举一下,比如浙大的熊蓉教授团队,现在搬到AIRS人工智能与机器人研究院的unitree(宇树科技)等,都是很优秀的,这里提一下,unitree的机器人,在YouTube上有个teseted团队特意买了一款做测评视频。
负载能力很好的就很难跑的快,跑的巧,跑的飘逸,因为负载能力好的就要稳,不管如何几乎无销量,这都为我后面要说的留下一点伏笔,我们再看柔性的躯干的四足。
1.2柔性躯干机器人
瑞士洛桑联邦理工大学一直在研究这种机器人的控制,如图四:
图四 四足模型
上海大学雷静桃教授带领的团队致力于多脊柱关节四足机器人的研究多年,初始提出一个气动肌肉躯干模型, 之后再此基础上又经过改良,实现腰椎胸椎都可通过气泵控制实现弯曲的仿生四足机器人,如图五:

图五
(以上图片都可以去官网看清晰图,我就偷懒拿我自己的材料配图。)
2.仿生六足/八足
仿生六足和八足,主要以蜘蛛昆虫类的较多,今天主要说说蜘蛛。
美国 一家公司Interbotix-Trossen Robotics 制作的PhantomX MK-IV如图六:
• 尺寸:高度 19 cm,宽度61.5cm, 长度54.4cm
• 承重:500g
• 速度:0.129m/s

图六 PhantomX MK-IV
图七T8X spider robot是由香港的一个机构研发的产品,共有八条腿,每条腿配备三个独立舵机,26台伺服电机 :
• 连接: Wi-Fi技术
• 自重:300克

图七 T8X spider robot
德国的Festo子公司Esslingen公司新近推出BionicWheelBot如图八 :
• 速度:根据地形变化


图八 BionicWheelBot
还有如下几款成熟的产品中国的vincross设计的六足机器人 HEXA 如图九:
• 传感器:720p 摄像头,三轴加速度计,距离传感器,红外发射器
• 尺寸:高度 12 cm,直径 50.8 cm
• 自重:1.75kg
• 速度:0.33m/s

图九 HEXA


图十一 Weaver
以上几个仿生蜘蛛的售价和销量一样的高。
4.仿生的发展
从以上案例可以很直观的看到,仿生机器人越来越跟真实的动物相似,同时还具备机器人的性能,这个发展毋庸置疑,逐步趋向于完美的状态。
5.仿生如何落地
这部分才是我要思考和阐述的重点。机器人想要发展,最直接的动力就是需求,往往是研究先于需求,仿生最明显的作用就是为军方提供伪装需求,但是军方的环境和需求远远低于市场。
限制机器人发展的第二个因素是资金,在当下这个追逐利益的大环境下,无论患者怎样的初衷,没有资金的支持,最后也会不得不歇菜。
所以这里就有一个办法,将机器人做成民用级别的产品,就有了市场,有了市场就有了资金。
众所周知,民用产品考虑的更多的是娱乐性和安全性。目前的科研项目一直追求的是更好的性能,都没能完善自己的技术,做成民用产品,持续性才是发展的基础。
针对上边我提到的四足和六足,对比之下,六足效益更好,销量更多,发展的也更好,究其原因,娱乐性比较好,一个迷你型的hexa售价12920元,集成很多功能,还能继续开发,可玩性很高。再来看看四足机器人,很少,做得好的就是那几个,还特别大,售价高,根本就没有市场,而且民用的环境下,快速性比不过轮子,负载还比不过轮子,那么这个科研技术如何存活,全世界都在头疼这个问题。
在这我要提到我的前东家,一家聚集很多人才的机器人公司,他能聚焦于智慧家居,我个人呢觉得这是一个很好的方向,生活的便利性是发展的大趋势。前东家正在研发小型的可爱的四足,可以像蜘蛛机器人一样,挥手,摇尾巴,弯曲身子卖萌,放在园区娱乐性很高。同时移动速度快,可以基于视觉,发现异常行为,图形捕捉和跟随,并报警,这比固定的摄像头可靠性又高了很多,如果搭载,其他智能功能也是很不错的方向,毕竟在全世界,猫猫狗狗作为家庭成员的有很多。基于此,我觉得前东家还是有一些领先的眼光,先谋生后深耕。
以上两个方向的例子,本人只想说,科研必不可少,能够适当的将一部分技术转化成民用消费品,能够让生活充满科技,也能让生活支撑科技,这才是良性循环。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









