




霍夫变换(Hough Transform)是一种用于检测图像中特定形状(如直线、圆等)的经典算法,其检测直线的原理如下:
直线的参数表示
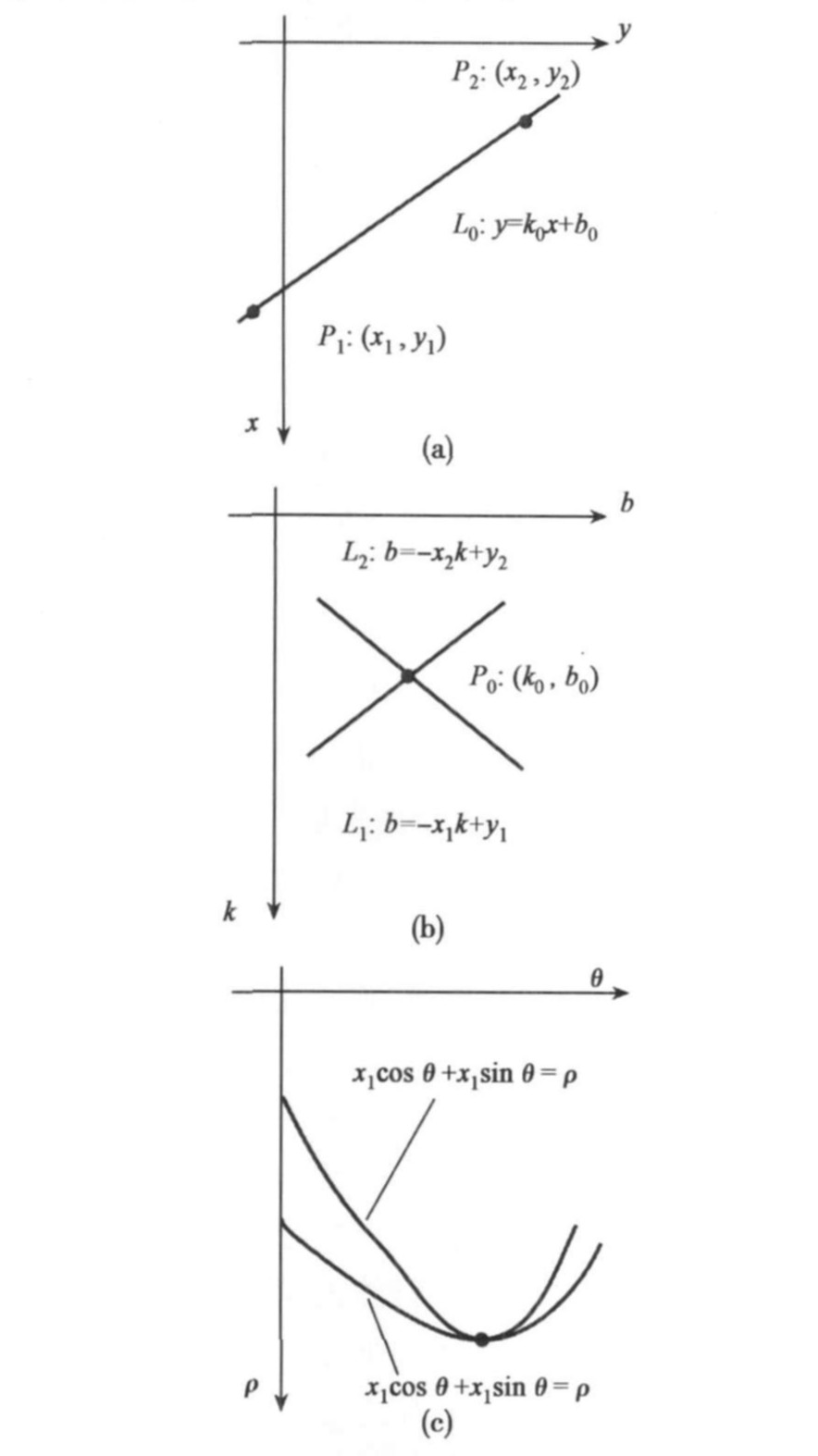
在笛卡尔坐标系中,直线可以用方程\(y = kx + b\)来表示,其中k是斜率,b是截距。但这种表示方法存在一些问题,例如当直线垂直于x轴时,斜率k会趋于无穷大,导致数值计算上的困难。
为了避免这个问题,在霍夫变换中通常使用极坐标来表示直线。对于平面上的任意一点\((x,y)\),从原点到该点的向量可以用极坐标\((\rho,\theta)\)来表示,其中\(\rho\)是向量的长度,\(\theta\)是向量与x轴正方向的夹角。那么,直线在极坐标下的方程可以表示为\(\rho = x\cos\theta + y\sin\theta\)。
霍夫空间与投票机制
- 霍夫空间:对于图像中的每一个点\((x,y)\),将其代入极坐标方程\(\rho = x\cos\theta + y\sin\theta\),可以得到一系列的\((\rho,\theta)\)组合,这些组合构成了该点在霍夫空间中的一条曲线。实际上,图像中同一条直线上的所有点,在霍夫空间中对应的曲线会相交于一点,这个交点的坐标\((\rho,\theta)\)就代表了图像中的这条直线。
- 投票机制:为了找到图像中的直线,需要在霍夫空间中进行 “投票”。首先创建一个二维数组作为霍夫累加器,其维度通常根据\(\rho\)和\(\theta\)的取值范围来确定。对于图像中的每一个边缘点(通过边缘检测算法得到),在霍夫空间中计算其对应的\((\rho,\theta)\)曲线,并在累加器中相应的位置进行投票(通常是将该位置的数值加 1)。投票结束后,累加器中数值较高的点就对应着图像中可能存在的直线。
阈值处理与峰值检测
- 阈值处理:为了确定哪些点是真正的直线,需要设置一个阈值。只有当累加器中的某个点的投票数超过阈值时,才认为该点对应着图像中的一条直线。
- 峰值检测:在超过阈值的点中,通常还需要进行峰值检测,以找到真正的直线参数。这是因为可能存在一些相邻的点都超过了阈值,但它们实际上代表的是同一条直线。通过峰值检测算法(如非极大值抑制等),可以找到霍夫空间中的局部最大值,这些最大值对应的\((\rho,\theta)\)就是最终检测到的直线的参数。
霍夫变换(Hough Transform)是一种用于检测图像中特定形状(如直线、圆等)的经典算法,其检测直线的原理如下:
直线的参数表示
在笛卡尔坐标系中,直线可以用方程\(y = kx + b\)来表示,其中k是斜率,b是截距。但这种表示方法存在一些问题,例如当直线垂直于x轴时,斜率k会趋于无穷大,导致数值计算上的困难。
为了避免这个问题,在霍夫变换中通常使用极坐标来表示直线。对于平面上的任意一点\((x,y)\),从原点到该点的向量可以用极坐标\((\rho,\theta)\)来表示,其中\(\rho\)是向量的长度,\(\theta\)是向量与x轴
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1143
1143

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









