







老惯例,先介绍下一下项目情况。这是一个应用在智能马桶上一个激光感应组件,装配在马桶盖板的最前端,使用无线充电+2.4无线通讯的方式,主要功能是:
1、无人使用,马桶盖关闭时,通过无线充电给模块供电,同时TOF检测是否有人靠近;
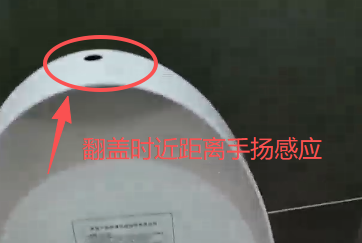
2、当检测到有人靠近时,自动翻盖,翻盖后,TOF切换为近距离检测,再次手扬执行翻圈动作,再次手扬,关圈关盖冲水。

以上就是这个模块最核心的功能了,模块组要功能及硬件组成:
1、无线充电,充电电流约200mA;
2、1F~7F法拉电容作为电池,实测2.5F法拉电容可提供2小时左右的续航,充电时间1分钟可达到90%,极大改善了锂电池充电速度慢的缺点,实测充放电次数5W次,无明显容量衰减;
3、激光测距,多测距模式,满足不同种应用场景下的测距需求;
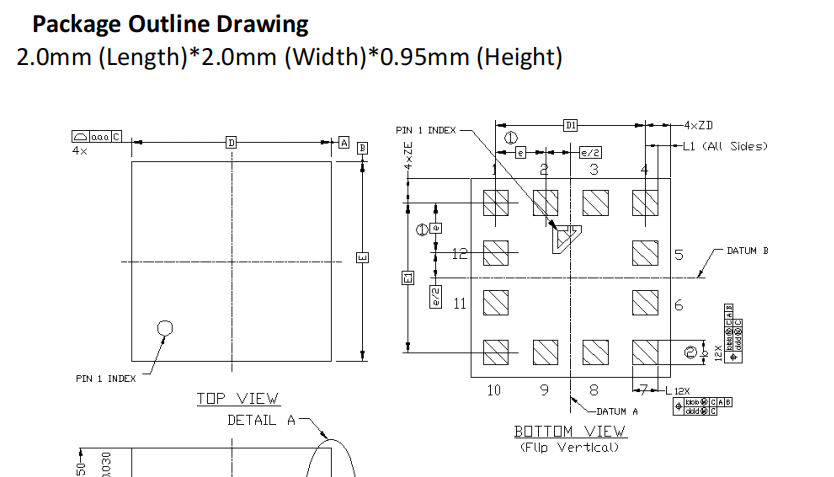
4、位置传感器QMA6100P(这就是今天故事的主角了),用于监测盖板状态,用于切换工作状态和工作模式;
5、2.4G无线通讯,用于与主板的通讯,实现各种交互功能;
产品演示视频如下:
一种使用tof做接近感应和翻圈翻盖的智能马桶感应组件
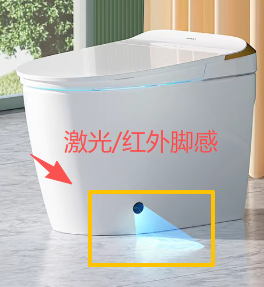
市面上很多的智能马桶使用的电容脚感、机械脚感、红外激光脚感,每次使用时,需要用脚在脚感的位置晃一下或者踢一下,马桶才能识别执行翻盖、翻圈、冲水等动作,而这款马桶激光接近感应模块,简化了这部分操作,只要人靠近,就会自动翻盖,如果需要翻圈,只要在翻盖角度超过45°后,在感应窗前晃一下就可以立即执行翻圈,离开时再在感应窗前用手晃一下,自动执行关圈关盖冲水。

好了下面正是进入今天的主题:位置传感器QMA6100P贴片不良改善验证
在试产的时候,发现大概有18%左右的激光感应模块无法识别翻盖动作,要么一直处于关盖状态下的工作模式、要么一直处于开盖的工作模式,有时候甚至直接不工作了。
问题很明确,就是QMA6100P虚汗了呗。首先,先看下这个芯片的封装:
本来以为是很简单的一个问题,但是实际改善还是历经波折,改过焊盘、调整过钢网厚度、也调整了炉温曲线、换过贴片厂、甚至找供应商确认是否存在引脚氧化导致的上锡不良...
多次验证,问题还是没有得到明显改善,这一折腾就1个多月的时间过去了,真的被折腾的够呛,感觉已经到了强弩之末的那种感觉,已经无能为力了。
一个偶然的时间,突然想到会不会是layout的问题?于是对着板子一直发呆...<此处省略1000字>
突然想到,有没有一种可能是因为这个芯片周围和底部的覆铜太多导致的?因为这个封装的焊盘很小,本来芯片就只有2mm*2mm的大小,会不会是因为覆铜太多导致的此处的温度升温不均,最后导致的贴片不良呢?
改善前:
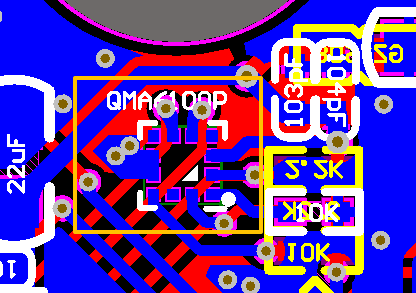
那就改个板子验证下吧,与之将芯片底部及其周围5mm 范围内的顶底面覆铜全部取消,重新打样验证。投入试产200pcs,试产后与这个相关的不良只有1pcs,改善效果明显。
至此,总算跳出了这个坑。有时候我很容易陷入自己给自己设置的死循环里,然后一直在里面绕圈圈,没办法跳出来,从其他角度去看待问题。不知道大家是否也有遇到过类似的情形吗?

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









