



B站 :道传科技上位机 观看教程
一、工业相机介绍
工业相机与我们手机上面的相机或者我们单反相机不同,工业相机它能够使用各种恶劣的工作环境,比如说高温,高压,高尘等。工业相机主要有面阵相机和线阵相机,线阵相机主要用于检测精度要求很高,运动速度很快的场景,而面阵相机应用更为广泛。
二、相机的分类
智能相机和PC-base相机—— 按集成程度划分
彩色相机和黑白相机 —— 按照色彩划分
面阵相机和线阵相机 —— 按照像素排列划分
CCD相机和CMOS 相机 —— 按照芯片划分
普通相机和3D相机 —— 按照特别功能划分
三、线阵相机
这种相机呈现出线状,一般上只在两种情况下使用这种相机,
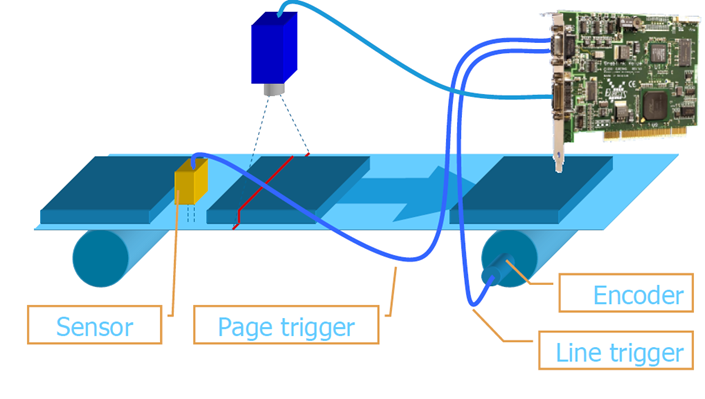
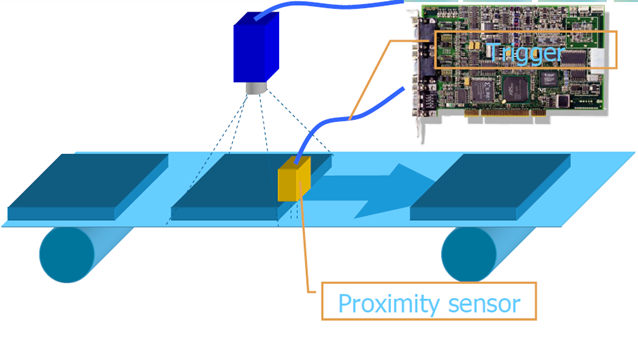
一是被检测视野为细长的带状,多用在滚筒上检测;
二是需要很大的视野和很高的精准度。我们看到的线阵相机的物体二维图像是通过多次线阵扫描组合形成的。
线阵相机的优点就是可以做很多一维像元数,而且总像元数也比面阵相机少,像元尺寸比较灵活,帧幅数高,特别适用于一维动态目标的测量。
四、面阵相机
面阵相机机器视觉应用更加广泛。
面阵CCD的优点是可以直接获取二维图像信息,测量图像直观。
可以短时曝光,利于抢拍动态景物,也可以拍静态景物。
由于我平时使用的基本都是面阵相机,所以这里主要介绍面阵相机的选型。
五、工业相机选型
(CCD/CMOS)
工业相机的图像传感器类型主要包括CCD(电荷耦合器件)和CMOS(互补金属氧化物半导体)两种,两者在技术原理、性能特点和应用场景上存在显著差异。以下是综合分析:
1. CCD工业相机的特点
2. CMOS工业相机的特点
3. 选型建议
总结:工业相机技术路线需根据具体参数(分辨率、帧率、动态范围)和应用场景(速度优先或质量优先)综合权衡,不存在绝对优劣。
工业选型看CCD和CMOS 主要看是不是高速 非高速可以优先考虑 CMOS
五、工业相机选型
(接口)
工业相机的前面就是用来接镜头,都是有专业的标准接口。它的后面,一般有两个接口,一个是电源接口,一个是数据接口。 工业相机的接口分为:USB 2.0/3.0、CamerLink、Gige、1394a/1394b、CoaXPress等类型的接口。这里只介绍几种常用的接口类型。
USB接口:支持热拔热插、使用便捷、标准统一、可连接多个设备、相机可通过USB线缆供电。但没有标准的协议、主从结构,CPU占用率高、带宽没有保证。usb3.0的接口一般都是可以自供电。但是也可以再接一个电源,假如usb接口供电不稳定的话,那么就可以选择外接电源来进行供电。
Gige千兆以太网接口:是一种基于千兆以太网通信协议开发的相机接口标准;适用于工业成像应用,通过网络传输无压缩视频信号;拓展性好,传输数据长度最长可伸展至100m(转播设备上可无限延长);带宽达1Gbit,因此大量的数据可即时得到传输; 可使用标准的NIC卡(或PC上已默认安装);经济性好,可使用廉价电缆(可使用通用的Ethernet电缆(CAT-6)和标准的连接器;可以很容易集成,且集成费用低;可管理维护性及广泛应用性。
Camerlink接口: 是一种串行通讯协议。采用LVDS接口标准,具有速度快、抗干扰能力强、功耗低。从Channel link技术上发展而来的,在Channel link技术基础上增加了一些传输控制信号,并定义了一些相关传输标准。协议采用MDR-26针连接器。高速率,带宽可达6400Mbps、抗干扰能力强、功耗低。
Gige接口简单方便的进行多相机设置,支持100米线材输出。Camera Link接口是专门针对高速图像数据需求的标准接口。USB 3.0接口具有简单易用,实时性好的特点。目前在机器视觉中,应用最广泛的接口是Gige(以太网)接口,以太网接口在传输速度、距离、成本等方面较其他接口具有很大的优势。
工业相机的前面就是用来接镜头,都是有专业的标准接口。它的后面,一般有两个接口,一个是电源接口,一个是数据接口。 工业相机的接口分为:USB 2.0/3.0、CamerLink、Gige、1394a/1394b、CoaXPress等类型的接口。这里只介绍几种常用的接口类型。
下图是接口图片

五、工业相机选型
(相机分辨率)
相机分辨率,相机每次采集图像的像素点数,也是指这个相机总共有多少个感光晶片,通常用万个为单位表示,以矩阵排列,通常相机产品在介绍时会说有千万像素、百万像素等。例如百万像素相机的像素矩阵为WxH=1000x1000。像素的大小是没有固定长度值的,不同设备上1个像素色块的大小是不一样的。每一个小方块都有一个明确的位置和被分配的色彩数值,而这些小方块的颜色和位置决定了该图像所呈现出来的样子
六、工业相机选型
(传感器尺寸)
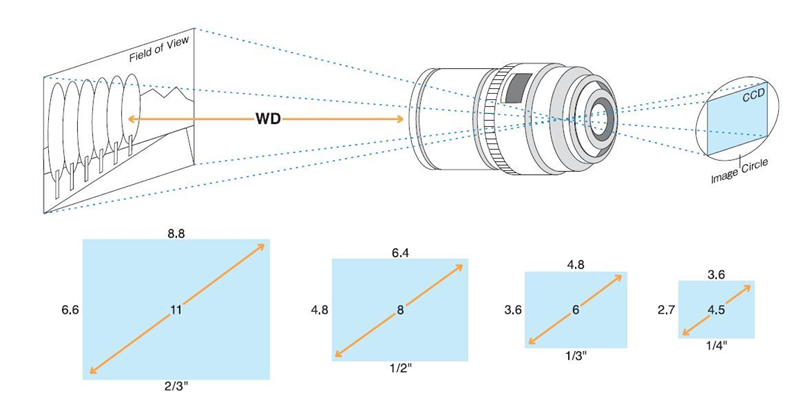
传感器(CCD/CMOS)尺寸的表示方法大惑不解,因为像1/1.8英寸、2/3英寸之类的尺寸,既不是任何一条边的尺寸,也不是其对角线尺寸,看着这样的尺寸,往往难以形成具体尺寸大小的概念。
靶面尺寸=对角线尺寸
靶面面积=传感器宽度x传感器高度
传感器尺寸大,在同样的像素密度下,像元尺寸也会大,这样会增加每个像元的感光面积,对提高图像的质量有益。传感器的尺寸,还能决定视野大小与工作距离。在同样的工作距离、同样的镜头下,传感器尺寸大,可以拍摄更大的视野。
七、工业相机选型
(其他概念1)
1、像元尺寸
有了相机分辨率和传感器尺寸,就能够计算像元尺寸。
像元尺寸=传感器尺寸/分辨率(像元个数)
这样就会分别得到宽度及高度上的像元尺寸
像元尺寸指芯片像元阵列上每个像元的实际物理尺寸,例如3.75umx3.75um 等。像元尺寸从某种程度上反映了芯片的对光的响应能力,像元尺寸越大,能够接收到的光子数量越多,在同样的光照条件和曝光时间内产生的电荷数量越多。对于弱光成像而言,像元尺寸是芯片灵敏度的一种表征。是不是有些迷惑了,听起来感觉和前面所说的相机分辨率很像,前面的相机分辨率值越小,分辨率高,这里是像元尺寸越大, 灵敏度越高。是两个不同的概念。
2、精度
精度指一个像素表示实际物体的大小,用(um*um)/pixel表示。注意,像元尺寸并不等于精度,像元尺寸是相机机械构造时固定的,而精度与相机视野有关,是变化的。精度值越小,精度越高。
单个像素对应的大小=视野宽/宽度分辨率 =视野高/高度分辨率
补充:考虑到相机边缘视野的畸变以及系统的稳定性要求,一般不会只用一个像素单位对应一个测量精度值,有时候根据光源的不同会提高计算的值,使用背光源的精度为1~3个像素,使用正光源的精度为3~5个像素:
例如:使用500W像素相机 分辨率为2500*2000 视野为100mm*80mm
单个像素对应大小 = 0.04mm
背光的精度为 0.04mm~0.12mm
正光的精度为 0.12mm~0.20mm
3、图片分辨率
图像分辨率比较好理解,就是单位距离内的像用多少个像素来显示,与精度意义相同,只是表示方法不同。
5、帧频/行频
相机的帧频/行频表示相机采集传输图像的频率,通常面阵相机用帧率表示,单位fps( . frame per second),如30fps,表示相机在1秒钟内最多能采集传输30帧图像;线阵相机通常用行频表示,单位KHz,如12KHz表示相机在1秒钟内最多能采集12000行图像数据。速度是相机的重要参数,在实际应用中很多时候需要对运动物体成像,相机的速度需要满足一定要求,才能清晰准确的对物体成像。
6、曝光时间
曝光时间:电子快门打开采集信息的时间,曝光时间越长,图像越亮,但同时,抗震动能力越差,对运动物体拍摄时曝光时间越长拖影越明显。过长的曝光时间会使得相机帧率下降。工业相机曝光时间可从1μs至10s不等。
7、增益
增益(Gain)的作用是放大传感器输出的电信号,从而提升图像的亮度。然而,增加增益的同时也会引入更多的噪声,进而影响图像质量。具体来说,当增益增加时,图像会变得更亮,但同时也会出现噪点,导致图像质量下降;而减少增益则会使图像变暗,但能够减少噪声,使图像更加清晰
1。在光照条件不佳的环境下,适当增加增益可以有效地提高图像的亮度,但需要注意不要过度使用,以免引入过多的噪点
8、阈值
阈值(Threshold)在图像处理中用于区分图像的前景和背景。通过设定一个特定的像素值作为阈值,可以将图像转换为二值图像(黑白图像),便于后续处理和分析。阈值的设定需要根据具体的图像内容和处理需求来调整,过高或过低的阈值都会影响分割效果。
阈值处理的具体步骤包括:
1.选择一个合适的阈值。
2.将图像中的每个像素的灰度值与这个阈值进行比较。
3.将高于阈值的像素设置为白色(或黑色),低于阈值的像素设置为黑色(或白色),从而得到二值化图像
B站 :道传科技上位机 观看教程视频


















 1506
1506

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









