



✔零知开源(零知IDE)是一个专为电子初学者/电子兴趣爱好者设计的开源软硬件平台,在硬件上提供超高性价比STM32系列开发板、物联网控制板。取消了Bootloader程序烧录,让开发重心从 “配置环境” 转移到 “创意实现”,极大降低了技术门槛。零知IDE编程软件,内置上千个覆盖多场景的示例代码,支持项目源码一键下载,项目文章在线浏览。零知开源(零知IDE)平台通过软硬件协同创新,让你的创意快速转化为实物,来动手试试吧!
✔访问零知实验室,获取更多实战项目和教程资源吧!
目录
项目概述
本项目基于零知 ESP32主控,搭配DRV8833 电机驱动模块和红外对射计数传感器,实现了高精度、高稳定性的电机速度测量与控制。核心功能包括:通过串口接收 PWM 指令控制电机转速,利用红外对射传感器采集电机码盘脉冲,结合定时器中断精准采样、EMA 指数加权滤波和平滑阈值处理,最终在 OLED 屏实时显示稳定的速度值(cm/s)、当前 PWM 输出和原始脉冲数
项目难点及解决方案
问题描述1:实时脉冲数据经常出现大幅跳动
解决方案:采用ESP32的硬件定时器提供精确的1秒采样周期,同时结合指数加权移动平均(EMA)滤波算法和变化阈值检测机制,实现了速度值的稳定输出
一、硬件操作部分
硬件清单
| 组件名称 | 型号规格 | 数量 | 备注 |
|---|---|---|---|
| 主控板 | 零知ESP32-WROOM-32 | 1 | 核心控制器 |
| 电机驱动 | DRV8833双H桥驱动模块 | 1 | 电机速度控制 |
| 传感器 | 红外对射计数传感器 | 1 | 脉冲检测 |
| OLED显示屏 | 0.96寸I2C SSD1306 | 1 | 数据显示 |
| 直流电机 | 微型直流电机 | 1 | 待测对象 |
| 码盘 | 20格黑白码盘 | 1 | 安装于电机轴 |
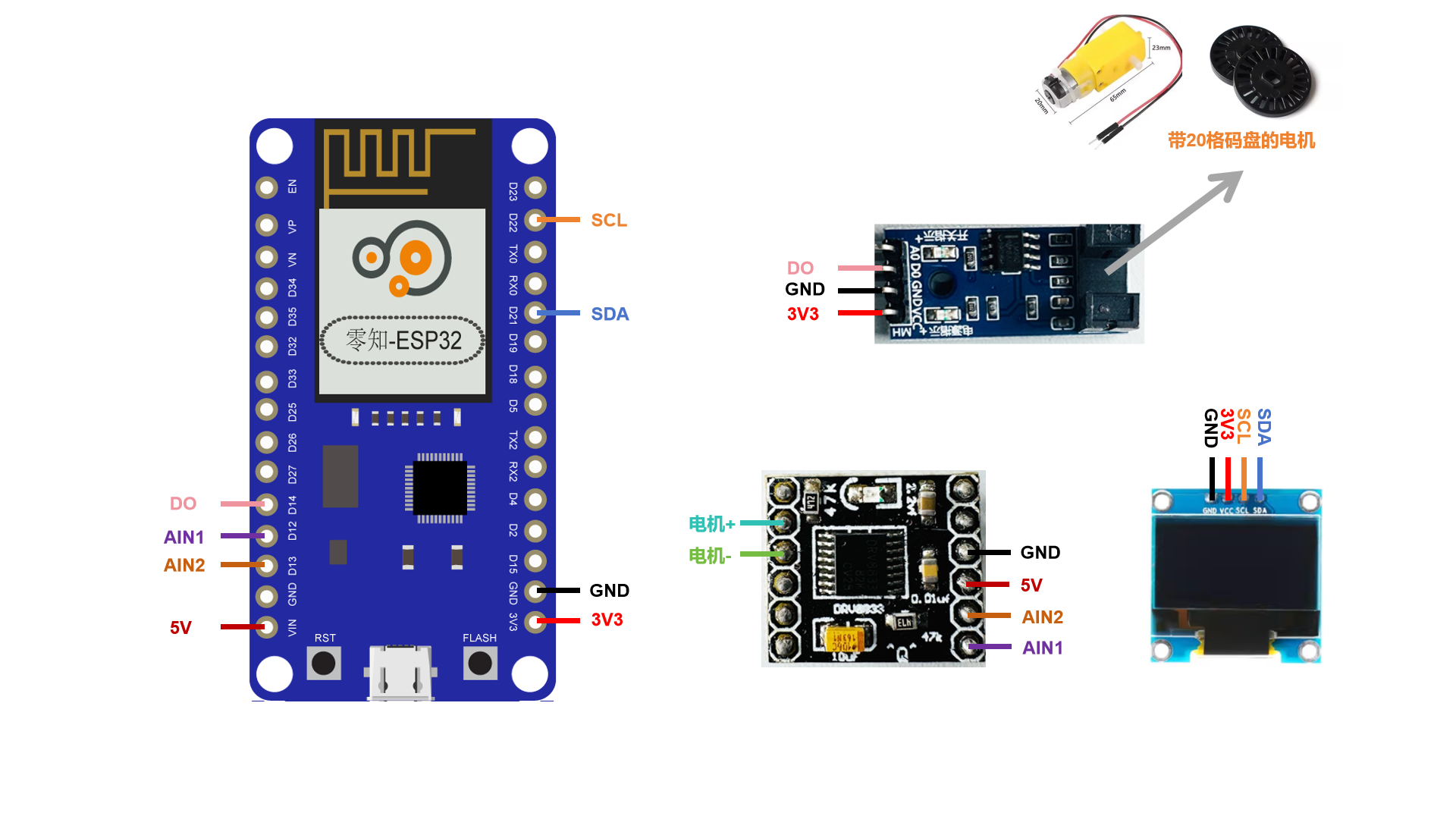
接线方案表
DRV8833采用5V供电确保电机驱动能力
| 零知 ESP32 引脚 | 连接器件 | 器件引脚 | 功能说明 |
|---|---|---|---|
| 12(MOTOR_AIN1) | DRV8833 | AIN1 | 电机 PWM 控制引脚 1 |
| 13(MOTOR_AIN2) | DRV8833 | AIN2 | 电机方向 / 停止控制引脚 2 |
| 14(SENSOR_PIN) | 红外对射传感器 | 信号脚(OUT) | 脉冲计数信号输入 |
| 21(SDA) | OLED1306 | SDA | I2C 数据总线 |
| 22(SCL) | OLED1306 | SCL | I2C 时钟总线 |
| DRV8833 OUT1 | 直流电机 | 电机引脚 1 | 电机动力输出 |
| DRV8833 OUT2 | 直流电机 | 电机引脚 2 | 电机动力输出 |
具体接线图
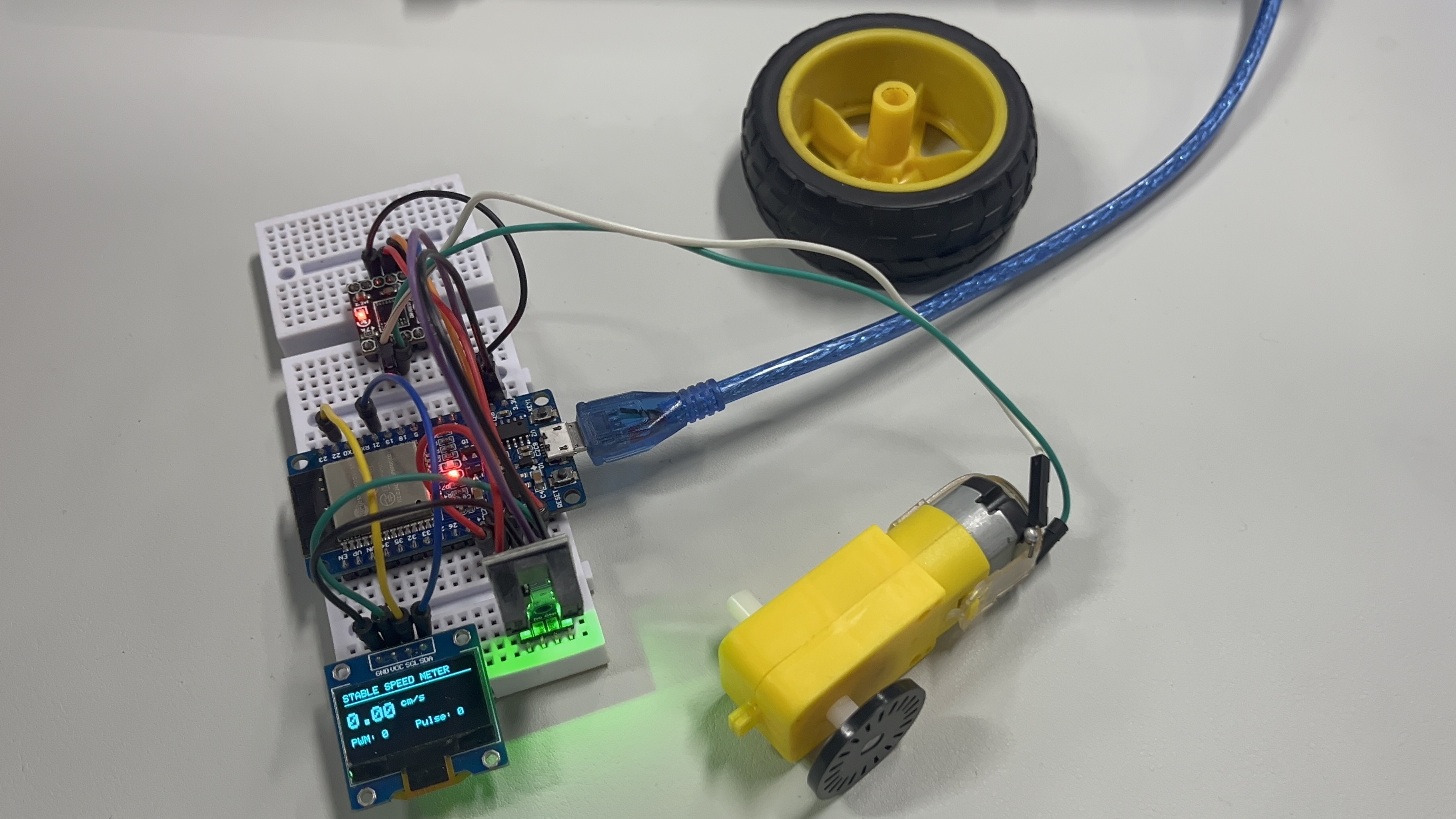
连接实物图
二、代码讲解部分
代码核心在于实现了多层级的稳定性算法,下面详细解析关键部分:
硬件定时器中断
// ================= 硬件定时器配置 =================
hw_timer_t *speedSampleTimer = NULL; // 速度采样定时器
volatile unsigned int timerInterruptCount = 0;// 定时器中断计数(10次=1秒)
portMUX_TYPE timerCriticalMux = portMUX_INITIALIZER_UNLOCKED; // 临界区保护锁
// ================= 中断服务函数 =================
/**
* @brief 红外传感器中断服务函数(上升沿触发+1ms去抖)
* 功能:过滤毛刺信号,统计有效脉冲数
*/
void IRAM_ATTR infraredSensorIsr() {
unsigned long currentIsrTime = micros();
// 1ms去抖:两次中断间隔>1000μs→视为有效脉冲
if (currentIsrTime - lastSensorIsrTime > 1000) {
portENTER_CRITICAL_ISR(&timerCriticalMux); // 禁止其他中断,保护计数变量
sensorPulseCount++;
portEXIT_CRITICAL_ISR(&timerCriticalMux);
lastSensorIsrTime = currentIsrTime;
}
}
/**
* @brief 定时器中断服务函数(100ms触发一次)
* 功能:累计中断次数,触发1秒一次的速度计算
*/
void IRAM_ATTR speedSampleTimerIsr() {
portENTER_CRITICAL_ISR(&timerCriticalMux);
timerInterruptCount++;
portEXIT_CRITICAL_ISR(&timerCriticalMux);
}IRAM_ATTR确保中断函数存储在IRAM中,提高执行速度
硬件定时器配置
void setup() {
// 串口初始化(115200波特率,用于控制和波形输出)
Serial.begin(115200);
while (!Serial); // 等待串口就绪(兼容部分开发板)
// OLED初始化
if (!oledDisplay.begin(SSD1306_SWITCHCAPVCC, OLED_I2C_ADDR)) {
Serial.println("OLED Init Failed!");
while (1); // 初始化失败则卡死,提示错误
}
oledDisplay.setTextColor(SSD1306_WHITE); // 设置字体颜色为白色
// PWM初始化(适配DRV8833)
ledcSetup(PWM_CHANNEL_MOTOR, PWM_FREQUENCY, PWM_RESOLUTION);
ledcSetup(PWM_CHANNEL_STANDBY, PWM_FREQUENCY, PWM_RESOLUTION);
ledcAttachPin(MOTOR_DRV_AIN1, PWM_CHANNEL_MOTOR);
ledcAttachPin(MOTOR_DRV_AIN2, PWM_CHANNEL_STANDBY);
// 红外传感器初始化(下拉输入+上升沿中断)
pinMode(INFRARED_SENSOR_PIN, INPUT_PULLDOWN);
attachInterrupt(digitalPinToInterrupt(INFRARED_SENSOR_PIN),
infraredSensorIsr, RISING);
// 速度采样定时器初始化(100ms中断一次)
speedSampleTimer = timerBegin(0, 80, true); // 定时器0,80分频(1MHz计数),向上计数
timerAttachInterrupt(speedSampleTimer, &speedSampleTimerIsr, true); // 绑定中断函数
timerAlarmWrite(speedSampleTimer, 100000ul, true); // 100000×1μs=100ms,自动重载
timerAlarmEnable(speedSampleTimer); // 使能定时器中断
// 系统就绪提示
Serial.println("=== System Ready ===");
Serial.println("Usage: Send PWM value (0~255) via Serial to control motor");
Serial.println("Serial Output Format: RawPulse | FilteredPulse | Speed(cm/s)");
Serial.println("====================");
}timerBegin 使用定时器0,预分频80(80MHz/80=1MHz),向上计数;timerAlarmWrite设置报警值为100,000微秒,自动重载;每10次中断构成1秒的完整采样周期
指数加权移动平均滤波
void loop() {
// 1. 串口接收PWM指令,控制电机速度
if (Serial.available() > 0) {
int inputPwm = Serial.parseInt(); // 读取串口发送的PWM值
// 验证输入有效性(仅接收0~255的数值)
if ((Serial.read() == '\n' || Serial.read() == '\r') && inputPwm >= 0 && inputPwm <= 255) {
setMotorPwmSpeed(inputPwm);
Serial.printf("Motor PWM Set to: %d\n", currentMotorPwm);
} else {
Serial.println("Invalid Input! Please send number between 0~255");
}
}
// 2. 每1秒采样一次,计算稳定速度(定时器中断累计10次=1秒)
if (timerInterruptCount >= 10) {
portENTER_CRITICAL(&timerCriticalMux); // 临界区保护,避免数据冲突
unsigned long rawPulse = sensorPulseCount; // 读取原始脉冲数
sensorPulseCount = 0; // 重置脉冲计数
timerInterruptCount = 0; // 重置定时器计数
portEXIT_CRITICAL(&timerCriticalMux);
// --- 核心算法:数据平滑+稳定速度计算 ---
// A. 静态噪声过滤:低速截止
if (rawPulse < minValidPulse) {
rawPulse = 0;
filteredPulseCount = 0.0; // 强制归零,避免噪声导致的虚假速度
}
// B. EMA指数加权滤波:平滑原始脉冲数据
// 公式:滤波后值 = α×当前测量值 + (1-α)×上一次滤波值
filteredPulseCount = (emaFilterAlpha * rawPulse) + ((1.0 - emaFilterAlpha) * filteredPulseCount);
// C. 阈值判断:仅当脉冲变化足够大时更新显示(抑制微小波动)
if (abs(filteredPulseCount - lastDisplayedPulse) > speedUpdateThreshold || rawPulse == 0) {
lastDisplayedPulse = filteredPulseCount; // 更新显示用脉冲数
}
// D. 计算最终稳定速度(cm/s)
currentSpeedCmS = lastDisplayedPulse * cmPerPulse;
// --- 串口输出(格式固定,适配波形工具) ---
// 输出格式:Raw脉冲数 | 滤波后脉冲数 | 速度(cm/s),保留2位小数
Serial.print(rawPulse);
Serial.print(" | ");
Serial.print(filteredPulseCount, 1); // 滤波后脉冲数保留1位小数
Serial.print(" | ");
Serial.println(currentSpeedCmS, 2); // 速度保留2位小数,波形更细腻
// --- 更新OLED显示 ---
updateOledDisplay(lastDisplayedPulse, currentSpeedCmS);
}
}| 环节 | 输入 | 输出 | 核心作用 |
|---|---|---|---|
| 低速截止 | 原始脉冲数 | 0 或原始值 | 过滤静态噪声(无电机转动时的误计数) |
| EMA 滤波 | 原始脉冲数 / 上次平滑值 | 平滑后脉冲数 | 抑制大幅波动,保留趋势 |
| 变化阈值 | 平滑后脉冲数 / 上次显示值 | 稳定显示值 | 过滤 ±1~2 的微小波动,保持显示稳定 |
项目完整代码
/**************************************************************************************
文件: /DRV8833_Motor_Stable_Speed/DRV8833_Motor_Stable_Speed.ino
作者:零知实验室(深圳市在芯间科技有限公司)
-^^- 零知开源,让电子制作变得更简单! -^^-
时间: 2025-12-2 16:36:27
说明: 基于ESP32的电机稳速测速系统。通过红外传感器检测脉冲,结合EMA滤波和阈值算法计算稳定速度,并在OLED上实时显示。可通过串口调节电机PWM速度。
***************************************************************************************/
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
// ================= 用户可调参数 (校准区) =================
// 1. 脉冲-距离转换系数 (cm/脉冲):根据实际硬件校准
// 理论计算: 轮径25.75mm × π ÷ 码盘20格 ≈ 0.4045 cm/脉冲
// 校准规则:测量距离偏短→增大;偏长→减小
float cmPerPulse = 0.4045;
// 2. EMA滤波平滑系数 (0.01~1.0)
// 小值→更平滑但响应慢;大值→响应快但抖动大
const float emaFilterAlpha = 0.3;
// 3. 速度更新阈值 (死区):抑制微小波动
// 仅当脉冲变化超过此值时更新显示,避免数值频繁跳动
const float speedUpdateThreshold = 2.0;
// 4. 最小有效脉冲数:过滤静态噪声
// 1秒内脉冲数小于此值→视为电机停止
const int minValidPulse = 2;
// ================= 硬件引脚定义 =================
#define OLED_SCREEN_WIDTH 128 // OLED屏幕宽度
#define OLED_SCREEN_HEIGHT 64 // OLED屏幕高度
#define OLED_I2C_ADDR 0x3C // OLED默认I2C地址
Adafruit_SSD1306 oledDisplay(OLED_SCREEN_WIDTH, OLED_SCREEN_HEIGHT, &Wire, -1);
// DRV8833电机驱动引脚
#define MOTOR_DRV_AIN1 12 // 电机PWM控制引脚1
#define MOTOR_DRV_AIN2 13 // 电机方向/停止控制引脚2
#define INFRARED_SENSOR_PIN 14 // 红外对射传感器信号引脚
// ESP32 PWM配置参数
#define PWM_CHANNEL_MOTOR 0 // 电机PWM通道1
#define PWM_CHANNEL_STANDBY 1 // 电机备用通道2
#define PWM_RESOLUTION 8 // PWM分辨率(8位→0~255)
#define PWM_FREQUENCY 1000 // PWM频率(1kHz,适配DRV8833)
// ================= 全局变量 =================
volatile unsigned long sensorPulseCount = 0; // 传感器原始脉冲计数
volatile unsigned long lastSensorIsrTime = 0; // 传感器中断上次触发时间(去抖用)
// 滤波后数据存储
float filteredPulseCount = 0.0; // EMA滤波后的脉冲数
float currentSpeedCmS = 0.0; // 当前稳定速度(cm/s)
float lastDisplayedPulse = 0.0; // 上一次显示的脉冲数
int currentMotorPwm = 0; // 当前电机PWM输出值
// ================= 硬件定时器配置 =================
hw_timer_t *speedSampleTimer = NULL; // 速度采样定时器
volatile unsigned int timerInterruptCount = 0;// 定时器中断计数(10次=1秒)
portMUX_TYPE timerCriticalMux = portMUX_INITIALIZER_UNLOCKED; // 临界区保护锁
// ================= 中断服务函数 =================
/**
* @brief 红外传感器中断服务函数(上升沿触发+1ms去抖)
* 功能:过滤毛刺信号,统计有效脉冲数
*/
void IRAM_ATTR infraredSensorIsr() {
unsigned long currentIsrTime = micros();
// 1ms去抖:两次中断间隔>1000μs→视为有效脉冲
if (currentIsrTime - lastSensorIsrTime > 1000) {
portENTER_CRITICAL_ISR(&timerCriticalMux); // 禁止其他中断,保护计数变量
sensorPulseCount++;
portEXIT_CRITICAL_ISR(&timerCriticalMux);
lastSensorIsrTime = currentIsrTime;
}
}
/**
* @brief 定时器中断服务函数(100ms触发一次)
* 功能:累计中断次数,触发1秒一次的速度计算
*/
void IRAM_ATTR speedSampleTimerIsr() {
portENTER_CRITICAL_ISR(&timerCriticalMux);
timerInterruptCount++;
portEXIT_CRITICAL_ISR(&timerCriticalMux);
}
// ================= 辅助函数 =================
/**
* @brief 设置电机PWM速度
* @param pwmVal: PWM值(0~255),0→停止,越大转速越快
*/
void setMotorPwmSpeed(int pwmVal) {
currentMotorPwm = constrain(pwmVal, 0, 255); // 限制PWM范围(0~255)
if (currentMotorPwm == 0) {
ledcWrite(PWM_CHANNEL_MOTOR, 0);
ledcWrite(PWM_CHANNEL_STANDBY, 0); // 两通道均为0→电机停止
} else {
ledcWrite(PWM_CHANNEL_MOTOR, currentMotorPwm);
ledcWrite(PWM_CHANNEL_STANDBY, 0); // DRV8833正转模式
}
}
/**
* @brief 更新OLED显示内容
* @param dispPulse: 显示用脉冲数(滤波后)
* @param dispSpeed: 显示用速度(cm/s)
*/
void updateOledDisplay(float dispPulse, float dispSpeed) {
oledDisplay.clearDisplay();
// 标题栏
oledDisplay.setTextSize(1);
oledDisplay.setCursor(0, 0);
oledDisplay.println("STABLE SPEED METER");
oledDisplay.drawLine(0, 10, OLED_SCREEN_WIDTH, 10, SSD1306_WHITE);
// 速度显示(大号字体)
oledDisplay.setCursor(0, 20);
oledDisplay.setTextSize(2);
oledDisplay.print(dispSpeed, 2); // 保留2位小数,提高精度
oledDisplay.setTextSize(1);
oledDisplay.println(" cm/s");
// 辅助信息(PWM+脉冲数)
oledDisplay.setCursor(0, 45);
oledDisplay.print("PWM: "); oledDisplay.print(currentMotorPwm);
oledDisplay.setCursor(64, 45);
oledDisplay.print("Pulse: "); oledDisplay.print((int)dispPulse);
oledDisplay.display();
}
// ================= 初始化函数 =================
void setup() {
// 串口初始化(115200波特率,用于控制和波形输出)
Serial.begin(115200);
while (!Serial); // 等待串口就绪(兼容部分开发板)
// OLED初始化
if (!oledDisplay.begin(SSD1306_SWITCHCAPVCC, OLED_I2C_ADDR)) {
Serial.println("OLED Init Failed!");
while (1); // 初始化失败则卡死,提示错误
}
oledDisplay.setTextColor(SSD1306_WHITE); // 设置字体颜色为白色
// PWM初始化(适配DRV8833)
ledcSetup(PWM_CHANNEL_MOTOR, PWM_FREQUENCY, PWM_RESOLUTION);
ledcSetup(PWM_CHANNEL_STANDBY, PWM_FREQUENCY, PWM_RESOLUTION);
ledcAttachPin(MOTOR_DRV_AIN1, PWM_CHANNEL_MOTOR);
ledcAttachPin(MOTOR_DRV_AIN2, PWM_CHANNEL_STANDBY);
// 红外传感器初始化(下拉输入+上升沿中断)
pinMode(INFRARED_SENSOR_PIN, INPUT_PULLDOWN);
attachInterrupt(digitalPinToInterrupt(INFRARED_SENSOR_PIN),
infraredSensorIsr, RISING);
// 速度采样定时器初始化(100ms中断一次)
speedSampleTimer = timerBegin(0, 80, true); // 定时器0,80分频(1MHz计数),向上计数
timerAttachInterrupt(speedSampleTimer, &speedSampleTimerIsr, true); // 绑定中断函数
timerAlarmWrite(speedSampleTimer, 100000ul, true); // 100000×1μs=100ms,自动重载
timerAlarmEnable(speedSampleTimer); // 使能定时器中断
// 系统就绪提示
Serial.println("=== System Ready ===");
Serial.println("Usage: Send PWM value (0~255) via Serial to control motor");
Serial.println("Serial Output Format: RawPulse | FilteredPulse | Speed(cm/s)");
Serial.println("====================");
}
// ================= 主循环 =================
void loop() {
// 1. 串口接收PWM指令,控制电机速度
if (Serial.available() > 0) {
int inputPwm = Serial.parseInt(); // 读取串口发送的PWM值
// 验证输入有效性(仅接收0~255的数值)
if ((Serial.read() == '\n' || Serial.read() == '\r') && inputPwm >= 0 && inputPwm <= 255) {
setMotorPwmSpeed(inputPwm);
Serial.printf("Motor PWM Set to: %d\n", currentMotorPwm);
} else {
Serial.println("Invalid Input! Please send number between 0~255");
}
}
// 2. 每1秒采样一次,计算稳定速度(定时器中断累计10次=1秒)
if (timerInterruptCount >= 10) {
portENTER_CRITICAL(&timerCriticalMux); // 临界区保护,避免数据冲突
unsigned long rawPulse = sensorPulseCount; // 读取原始脉冲数
sensorPulseCount = 0; // 重置脉冲计数
timerInterruptCount = 0; // 重置定时器计数
portEXIT_CRITICAL(&timerCriticalMux);
// --- 核心算法:数据平滑+稳定速度计算 ---
// A. 静态噪声过滤:低速截止
if (rawPulse < minValidPulse) {
rawPulse = 0;
filteredPulseCount = 0.0; // 强制归零,避免噪声导致的虚假速度
}
// B. EMA指数加权滤波:平滑原始脉冲数据
// 公式:滤波后值 = α×当前测量值 + (1-α)×上一次滤波值
filteredPulseCount = (emaFilterAlpha * rawPulse) + ((1.0 - emaFilterAlpha) * filteredPulseCount);
// C. 阈值判断:仅当脉冲变化足够大时更新显示(抑制微小波动)
if (abs(filteredPulseCount - lastDisplayedPulse) > speedUpdateThreshold || rawPulse == 0) {
lastDisplayedPulse = filteredPulseCount; // 更新显示用脉冲数
}
// D. 计算最终稳定速度(cm/s)
currentSpeedCmS = lastDisplayedPulse * cmPerPulse;
// --- 串口输出(格式固定,适配波形工具) ---
// 输出格式:Raw脉冲数 | 滤波后脉冲数 | 速度(cm/s),保留2位小数
Serial.print(rawPulse);
Serial.print(" | ");
Serial.print(filteredPulseCount, 1); // 滤波后脉冲数保留1位小数
Serial.print(" | ");
Serial.println(currentSpeedCmS, 2); // 速度保留2位小数,波形更细腻
// --- 更新OLED显示 ---
updateOledDisplay(lastDisplayedPulse, currentSpeedCmS);
}
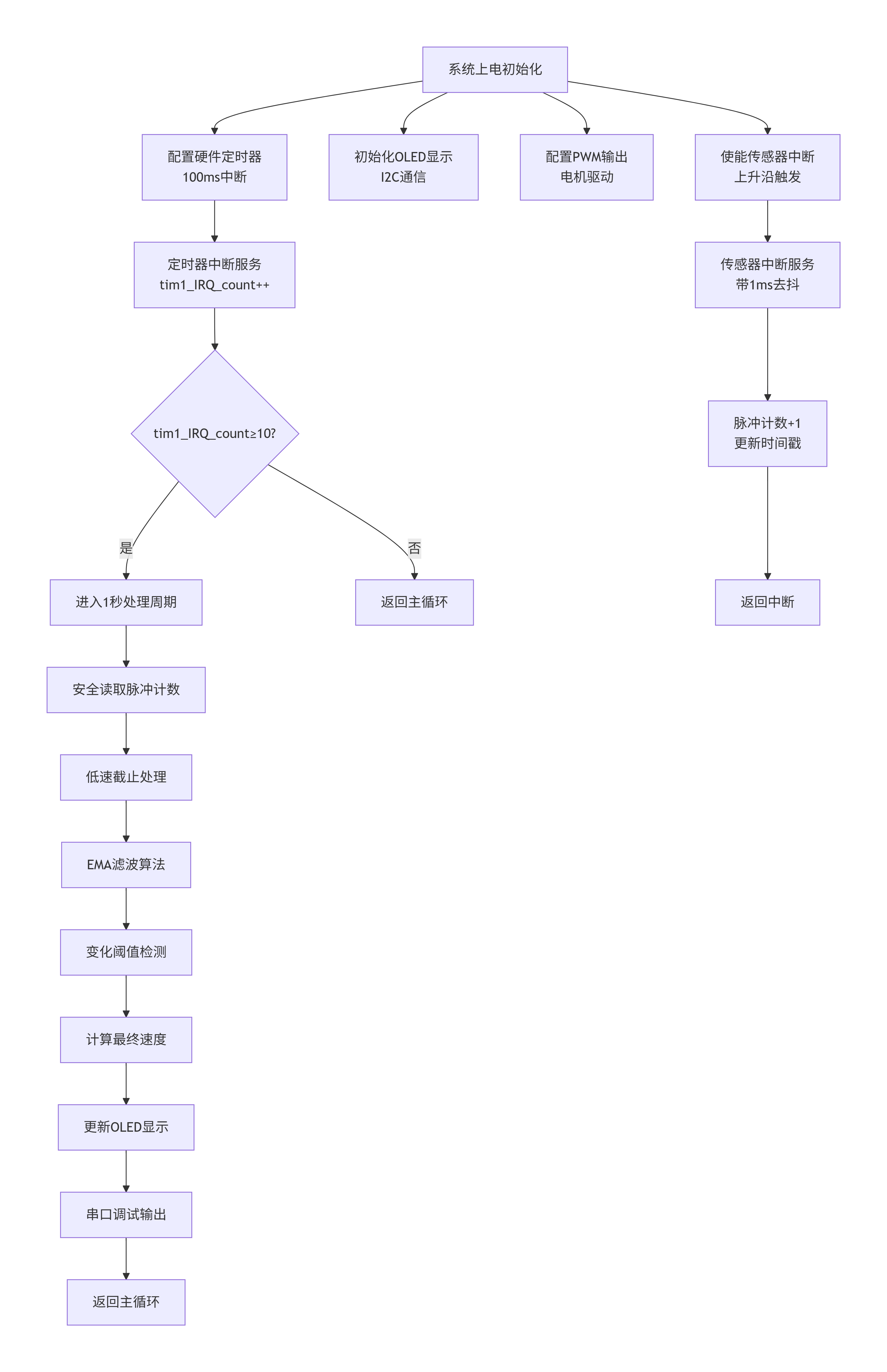
}系统流程图
三、项目结果演示
校准全过程
1)硬件安装与接线
按接线表连接所有器件,确保:
红外对射传感器与码盘间距 5~10mm,对齐齿隙;DRV8833 供电电压匹配电机;OLED I2C 地址为 0x3C
2)传统 PID 方案测试
烧录原始 PID 代码,打开OLED 显示屏上的局域网地址,观察脉冲波形变化

原始脉冲数波动 52~71,抖动严重,无法稳定显示
3)改进方案校准
烧录改进后代码,进行以下校准:
距离校准(CM_PER_PULSE):
①用尺子量取 1 米(100cm)距离,在串口发送 PWM=150,让电机带动轮子沿直线走 1 米;
②记录串口打印的Raw值(假设为 247),则CM_PER_PULSE=100/247≈0.405,修改代码后重新上传
滤波系数调节(FILTER_ALPHA):
若速度仍抖,减小 α(如 0.2);若响应过慢,增大 α(如 0.4)
阈值调节(CHANGE_THRESHOLD):
微小波动多则增大至 2.5~3.0;响应迟缓则减小至 1.5~2.0
4)稳定测试
发送不同 PWM 值(50~255),观察串口和 OLED:
串口打印:Raw 值波动 ±3~5,但 Filtered 值波动≤±1,DispSpeed 波动≤±0.3 cm/s;
OLED 显示:速度值稳定,无频繁跳变
参数调节指南
| 参数 | 默认值 | 调节范围 | 作用 | 调节建议 |
|---|---|---|---|---|
CM_PER_PULSE | 0.4045 | 0.1-1.0 | 每个脉冲对应的距离 | 根据实际测量校准 |
FILTER_ALPHA | 0.3 | 0.01-1.0 | 滤波平滑系数 | 值越小越平滑但响应慢 |
CHANGE_THRESHOLD | 2.0 | 0.5-10.0 | 变化检测阈值 | 值越大显示越稳定 |
MIN_PULSE_CUTOFF | 2 | 1-10 | 最小有效脉冲 | 过滤静止噪声 |
稳定速度输出波形图
打开调试功能/串口绘图仪→设置波特率→观察波形脉冲和速度变化:
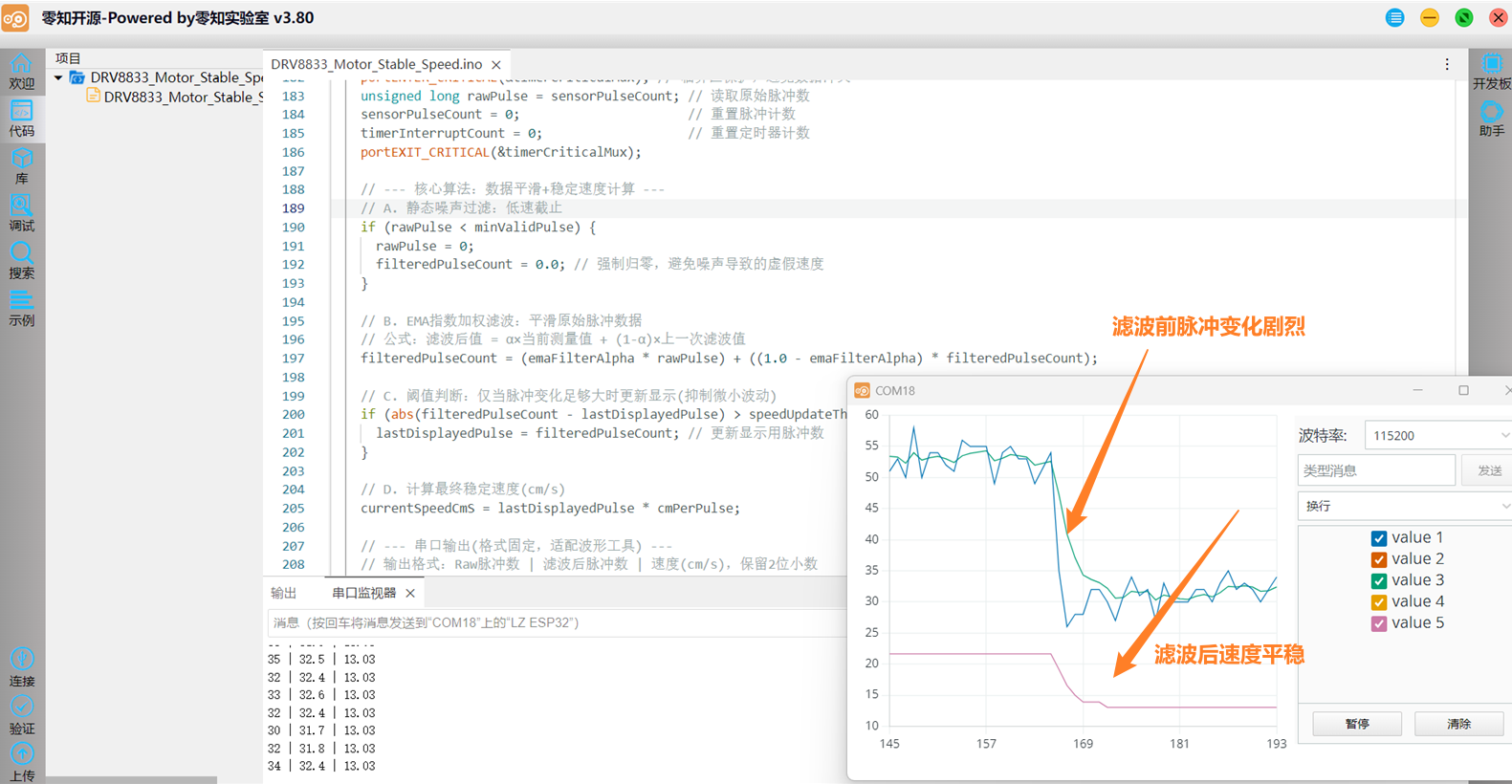
速度波形基本呈水平线,波动幅度≤±0.3 cm/s,无大幅跳变
视频演示
DRV8833的稳定电机测速系统
串口发送 PWM 指令(255→127→90→0)、实时展示 OLED 屏,速度值稳定更新,PWM 与原始脉冲数同步显示、串口波形区速度波形平稳,无剧烈波动
四、DRV8833 与红外对射传感器技术讲解
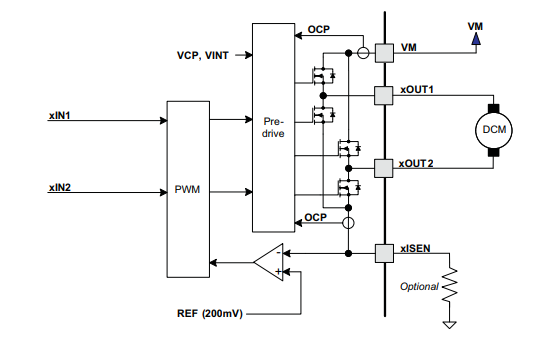
DRV8833 电机驱动模块
工作原理
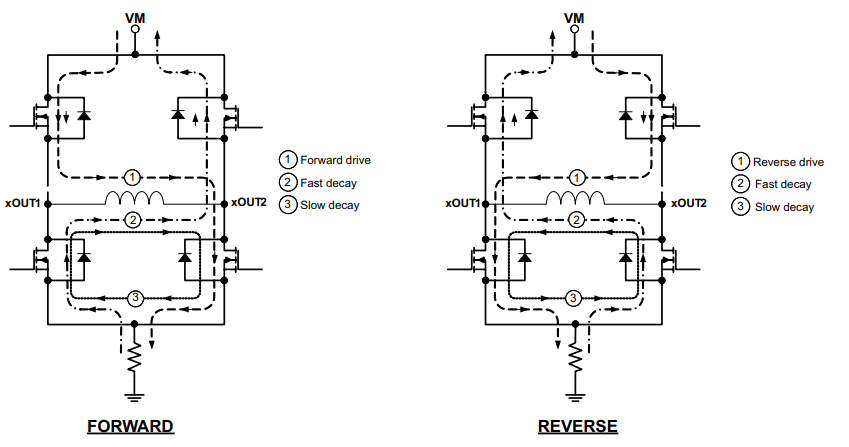
DRV8833 内部集成双 H 桥驱动电路,H 桥由 4 个 MOS 管组成,通过控制 MOS 管的导通 / 截止实现电机正转、反转、停止和调速
正转:AIN1=PWM,AIN2=LOW;
反转:AIN1=LOW,AIN2=PWM;
停止:AIN1=LOW,AIN2=LOW;
调速:改变 PWM 占空比(0~255),占空比越大,电机转速越高
红外对射计数传感器
工作原理
传感器由红外发射管和接收管组成,呈对射式安装:
无遮挡时:发射管发出的红外光被接收管接收,接收管导通,输出低电平;有遮挡时(码盘齿经过):红外光被阻断,接收管截止,输出高电平;电机转动时,码盘的齿和间隙交替遮挡红外光,传感器输出连续脉冲,脉冲数 = 码盘齿数 × 转动圈数。
计数逻辑
本项目电机码盘为 20 格(20 齿 + 20 间隙),电机转 1 圈,传感器输出 20 个脉冲;结合轮径计算每脉冲对应的距离:
每脉冲距离(cm)= 轮子周长(cm)/ 码盘齿数 =(π×轮径cm)/20
五、常见问题解答(FAQ)
Q1:为什么我的脉冲计数仍然不稳定?
A:请按以下步骤排查:检查传感器安装是否牢固,码盘是否偏心;测量传感器输出信号,增大 FILTER_ALPHA 至 0.4~0.5,或增大 CHANGE_THRESHOLD 至 2.5~3.0,尝试更小的值(如0.2);检查电源稳定性
Q2:电机不转动
A:请检查: DRV8833 供电,确保供电电大于等于电机工作电压; PWM 值大于等于70,电机启动需要最小电压驱动;DRV8833 模块引脚的 OUT1/OUT2 正确连接到电机,,AIN1=12,AIN2=13
项目资源整合
DRV8833数据手册: DRV8833 Dual H-Bridge Motor Driver datasheet (Rev. E)
OLED SSD1306库文件: Adafruit_SSD1306

















 3592
3592

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









