



3月17日,奥比中光与NVIDIA(英伟达)联合举办的第三届3D视觉创新应用竞赛圆满落幕。本次3D视觉创新应用竞赛持续秉承“专业、创新、开放”的理念,在本次赛程中,竞赛共吸引来自全国各地的超20支高校队伍报名参赛,经过激烈角逐,最终有5支优胜队伍跻身决赛,角逐冠军!
此次竞赛得到中国图象图形学学会、OpenCV中国等合作伙伴的大力支持,以普罗米修斯视觉技术联合创始人 邵志兢、奥比中光高级技术顾问 胡正(费德勒)、OpenCV中国高级研究员 吴佳以及奥比中光技术专家组成的产学研评委团对参赛方案进行评审并给予指导意见。
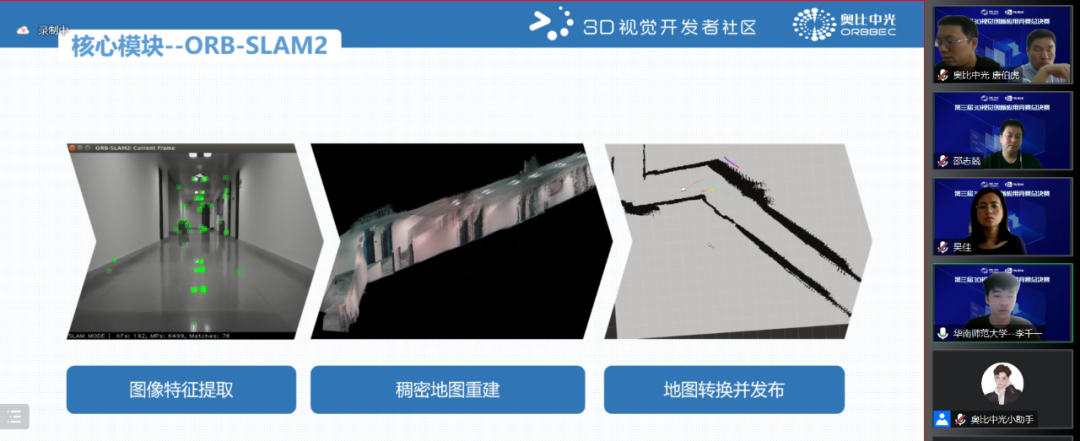
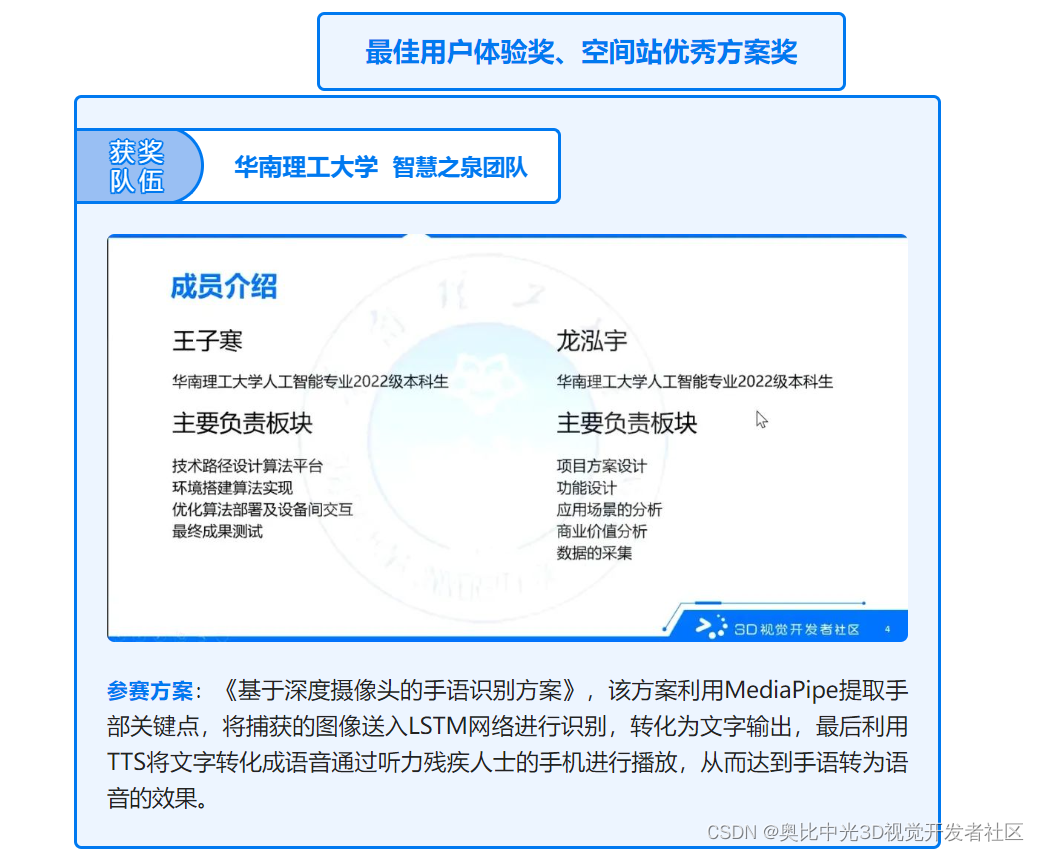
参赛项目均基于奥比中光3D传感器与Jetson Nano的组合套件开发,在决赛环节,5支队伍展示了基于RGBD物件识别抓取的 Wall-A机器人小车、工业3D视觉测振仪、基于深度摄像头的手语识别方案、基于点云的地图重构系统以及基于VSLAM的自主移动清洁机器人的解决方案。


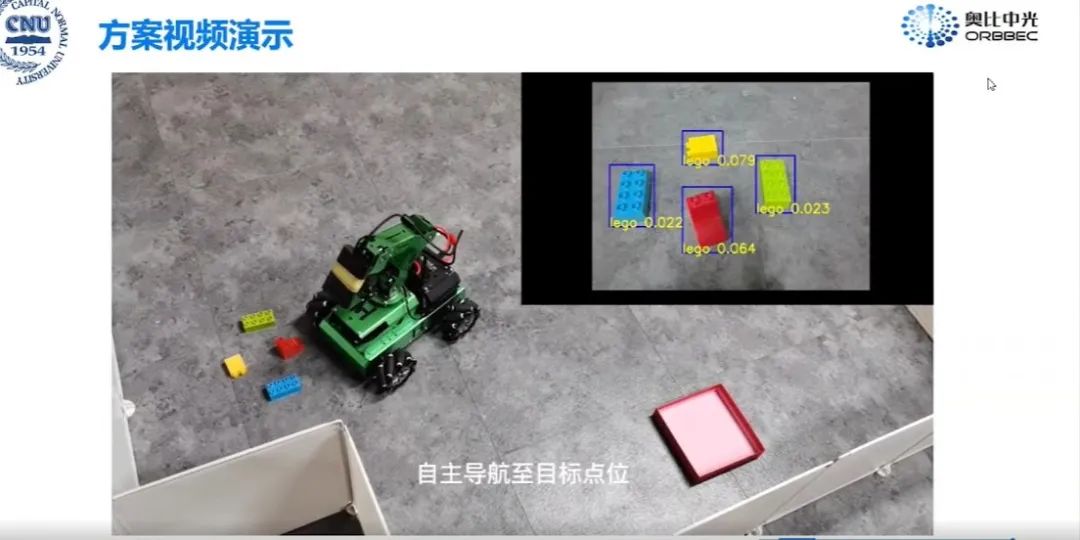
首都师范大学参赛队伍的《基于RGB-D物件识别和抓取 Wall-A机器人小车》,该方案实现了工业分捡、智能建造、险情抢救等智能机器人广泛应用场景为目标,基于NeRF的目标三维重建技术、RGB-D三维目标检索技术,搭载Jetson Nano与Femto深度相机,实现了机器人的自主目标检索、分类与抓取等功能。通过加入Instant NGP与NeuS三维重建算法,只需要10分钟便可完成数据采集流程,极大地提高效率。
华南师范大学的参赛队伍带来的《基于VSLAM的自主移动清洁机器人》方案,非常新颖!针对环卫产业劳动力老龄化、职业被动选择、工作安全风险高、装备高碳排放污染等痛点。利用场景简单、安全风险低、区域、路线固定的特点,智能清洁机器人可有效节省人力成本、提高作业效率、减少安全危害、降低污染物排放量,成为环卫产业的有力武器。
并且,利用ORBBEC Astra pro 3D结构光技术,依靠其具有高精度、低能耗、反应迅速等优点,实现了短距、长距和高分辨率RGB摄像机之间切换,以满足个性化场景需求。其极富创造性的项目方案受到评委导师团的高度赞扬。
最后的“空中圆桌”环节,竞赛的评委导师们展开线上讨论,除了给予竞赛作品评价和指导意见,还针对各参赛队的选题价值、3D视觉技术在人工智能领域的应用前景等各方面分别进行精彩分享。




针对各参赛的整体表现,专家们给出以下几点建议:
🔹第一,注重应用创新。项目在开发过程中应视野宽阔、体现人文关怀,要提高多角度、多维度、多尝试的开发思维,力求技术和设计上的创新,作品才能更加上一层楼;
🔹第二,拓展自身爱好,以乐促学。正所谓“知之者不如好之者,好之者不如乐之者”,用爱好开发作品,以自己的兴趣爱好为导向,想法会更加有趣、新颖;
🔹第三,多参加竞赛,端正态度,全力以赴。高质量的学习与工作才能得到高质量的回报。每一次比赛都是成长的机会,加深理解与总结,长期积累,日日精进,最终才能实现从学术人才到行业人才的跨越。
🔹第四,要更多注重工程化、产品化思维,注重技术产品转化的能力。在方案开发过程中要多思考当前行业的现实需求,并将其整合到方案中,使之成为重要的一环,这样才能更加清楚明了自己作品的定位和定义。
作为3D视觉领域的重磅赛事,虽受疫情影响延期举办,但决赛通过以线上形式展开并在多平台同步直播,仍然吸引了众多开发者的关注,受到高校师生、行业专家高度赞可。
随着3D视觉行业的快速发展,3D视觉人才需求迎来爆发。奥比中光开发者社区秉承“注重实战、全面发展、透视行业、成就未来”的宗旨,注重开发者的实战能力培养,除3D视觉创新应用竞赛外,还在国内各高校建设3D视觉追光空间站实训平台,通过公开课、实战训练营等一系列教学与实战结合的活动,推动产教融合、协同育人,为行业输送高质量的人才,不断夯实3D视觉行业基础。
获奖名单公示


点击下方“链接”即可观看总决赛直播回放
https://developer.orbbec.com.cn/v/lecture
版权声明:本文为奥比中光3D视觉开发者社区特约作者授权原创发布,未经授权不得转载,本文仅做学术分享,版权归原作者所有,若涉及侵权内容请联系删文。
3D视觉开发者社区是由奥比中光给所有开发者打造的分享与交流平台,旨在将3D视觉技术开放给开发者。平台为开发者提供3D视觉领域免费课程、奥比中光独家资源与专业技术支持。
加入【3D视觉开发者社区】学习行业前沿知识,赋能开发者技能提升! 加入【3D视觉AI开放平台】体验AI算法能力,助力开发者视觉算法落地!


















 727
727

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









