




 本教程介绍如何使用正态分布变换(NDT)算法高效配准两个大规模点云,通过统计模型和标准优化技术确定最可能的配准。代码示例展示了数据加载、点云下采样、参数设置、配准计算、结果保存及可视化。
本教程介绍如何使用正态分布变换(NDT)算法高效配准两个大规模点云,通过统计模型和标准优化技术确定最可能的配准。代码示例展示了数据加载、点云下采样、参数设置、配准计算、结果保存及可视化。
在本教程中,我们将介绍如何使用正态分布变换(NDT)算法来确定两个大规模点云(都超过100,000个点)之间的刚性变换。NDT算法是一种配准算法,其使用应用于3D点的统计模型的标准优化技术来确定两个点云之间的最可能的配准。因为其在配准过程中不依赖对应点的特征计算和匹配,所以效率高。有关NDT算法内部工作原理的更多信息,请参阅Martin Magnusson博士的博士论文“The Three-Dimensional Normal Distributions Transform – an Efficient Representation for Registration, Surface Analysis, and Loop Detection”。
代码
首先,下载数据集room_scan1.pcd和room_scan2.pcd并将它们保存到磁盘。这些点云包含从不同角度对同一房间的360度扫描。
然后,在您喜欢的编辑器中创建一个文件,并将以下内容放入其中。我在本教程中使用了normal_distributions_transform.cpp。
#include <iostream>
#include <thread>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/registration/ndt.h>
#include <pcl/filters/approximate_voxel_grid.h>
#include <pcl/visualization/pcl_visualizer.h>
using namespace std::chrono_literals;
int main (int argc, char** argv)
{
// Loading first scan of room.
pcl::PointCloud<pcl::PointXYZ>::Ptr target_cloud (new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ> ("room_scan1.pcd", *target_cloud) == -1)
{
PCL_ERROR ("Couldn't read file room_scan1.pcd \n");
return (-1);
}
std::cout << "Loaded " << target_cloud->size () << " data points from room_scan1.pcd" << std::endl;
// Loading second scan of room from new perspective.
pcl::PointCloud<pcl::PointXYZ>::Ptr input_cloud (new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ> ("room_scan2.pcd", *input_cloud) == -1)
{
PCL_ERROR ("Couldn't read file room_scan2.pcd \n");
return (-1);
}
std::cout << "Loaded " << input_cloud->size () << " data points from room_scan2.pcd" << std::endl;
// Filtering input scan to roughly 10% of original size to increase speed of registration.
pcl::PointCloud<pcl::PointXYZ>::Ptr filtered_cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::ApproximateVoxelGrid<pcl::PointXYZ> approximate_voxel_filter;
approximate_voxel_filter.setLeafSize (0.2, 0.2, 0.2);
approximate_voxel_filter.setInputCloud (input_cloud);
approximate_voxel_filter.filter (*filtered_cloud);
std::cout << "Filtered cloud contains " << filtered_cloud->size ()
<< " data points from room_scan2.pcd" << std::endl;
// Initializing Normal Distributions Transform (NDT).
pcl::NormalDistributionsTransform<pcl::PointXYZ, pcl::PointXYZ> ndt;
// Setting scale dependent NDT parameters
// Setting minimum transformation difference for termination condition.
ndt.setTransformationEpsilon (0.01);
// Setting maximum step size for More-Thuente line search.
ndt.setStepSize (0.1);
//Setting Resolution of NDT grid structure (VoxelGridCovariance).
ndt.setResolution (1.0);
// Setting max number of registration iterations.
ndt.setMaximumIterations (35);
// Setting point cloud to be aligned.
ndt.setInputSource (filtered_cloud);
// Setting point cloud to be aligned to.
ndt.setInputTarget (target_cloud);
// Set initial alignment estimate found using robot odometry.
Eigen::AngleAxisf init_rotation (0.6931, Eigen::Vector3f::UnitZ ());
Eigen::Translation3f init_translation (1.79387, 0.720047, 0);
Eigen::Matrix4f init_guess = (init_translation * init_rotation).matrix ();
// Calculating required rigid transform to align the input cloud to the target cloud.
pcl::PointCloud<pcl::PointXYZ>::Ptr output_cloud (new pcl::PointCloud<pcl::PointXYZ>);
ndt.align (*output_cloud, init_guess);
std::cout << "Normal Distributions Transform has converged:" << ndt.hasConverged ()
<< " score: " << ndt.getFitnessScore () << std::endl;
// Transforming unfiltered, input cloud using found transform.
pcl::transformPointCloud (*input_cloud, *output_cloud, ndt.getFinalTransformation ());
// Saving transformed input cloud.
pcl::io::savePCDFileASCII ("room_scan2_transformed.pcd", *output_cloud);
// Initializing point cloud visualizer
pcl::visualization::PCLVisualizer::Ptr
viewer_final (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer_final->setBackgroundColor (0, 0, 0);
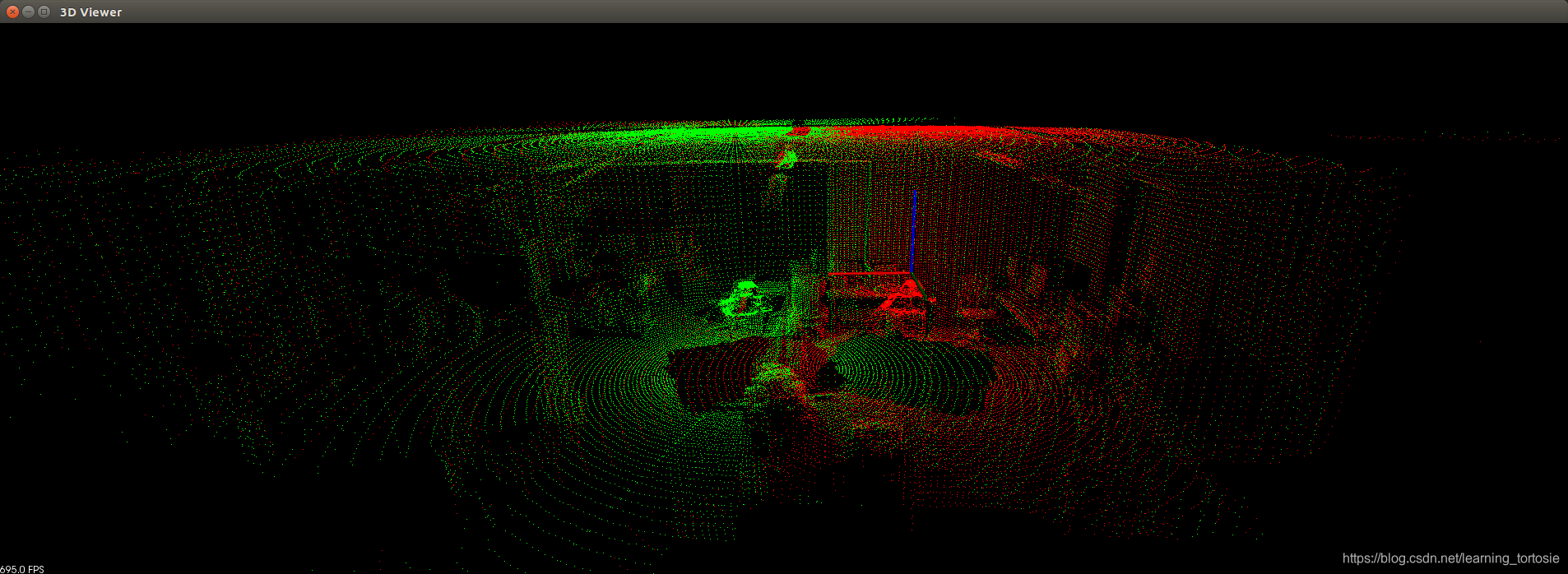
// Coloring and visualizing target cloud (red).
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>
target_color (target_cloud, 255, 0, 0);
viewer_final->addPointCloud<pcl::PointXYZ> (target_cloud, target_color, "target cloud");
viewer_final->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
1, "target cloud");
// Coloring and visualizing transformed input cloud (green).
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>
output_color (output_cloud, 0, 255, 0);
viewer_final->addPointCloud<pcl::PointXYZ> (output_cloud, output_color, "output cloud");
viewer_final->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
1, "output cloud");
// Starting visualizer
viewer_final->addCoordinateSystem (1.0, "global");
viewer_final->initCameraParameters ();
// Wait until visualizer window is closed.
while (!viewer_final->wasStopped ())
{
viewer_final->spinOnce (100);
std::this_thread::sleep_for(100ms);
}
return (0);
}
解释说明
这部分我就不翻译了,直接看代码和原文就好。
主要包括:
- 添加需要的头文件
- 加载目标点云和源点云
- 使用近似体素网格滤波器对源点云进行下采样,提高配准效率
- 初始化NDT,设置参数,参数要根据自己的数据进行调整
- 给NDT算法提供一个初始估计
- 保存点云
- 可视化
编译和运行
将以下内容添加到CMakeLists.txt文件中:
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(normal_distributions_transform)
find_package(PCL 1.5 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(normal_distributions_transform normal_distributions_transform.cpp)
target_link_libraries (normal_distributions_transform ${PCL_LIBRARIES})
然后,编译并运行:
./normal_distributions_transform
您应该看到与下面类似的结果以及对齐点云的可视化。
Loaded 112586 data points from room_scan1.pcd
Loaded 112624 data points from room_scan2.pcd
Filtered cloud contains 12433 data points from room_scan2.pcd
Normal Distributions Transform has converged:1 score: 0.638694
注意:计算量有点大,电脑配置低的要耐心等会儿才会出结果。
参考
http://pointclouds.org/documentation/tutorials/normal_distributions_transform.php#normal-distributions-transform

















 2773
2773

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









