




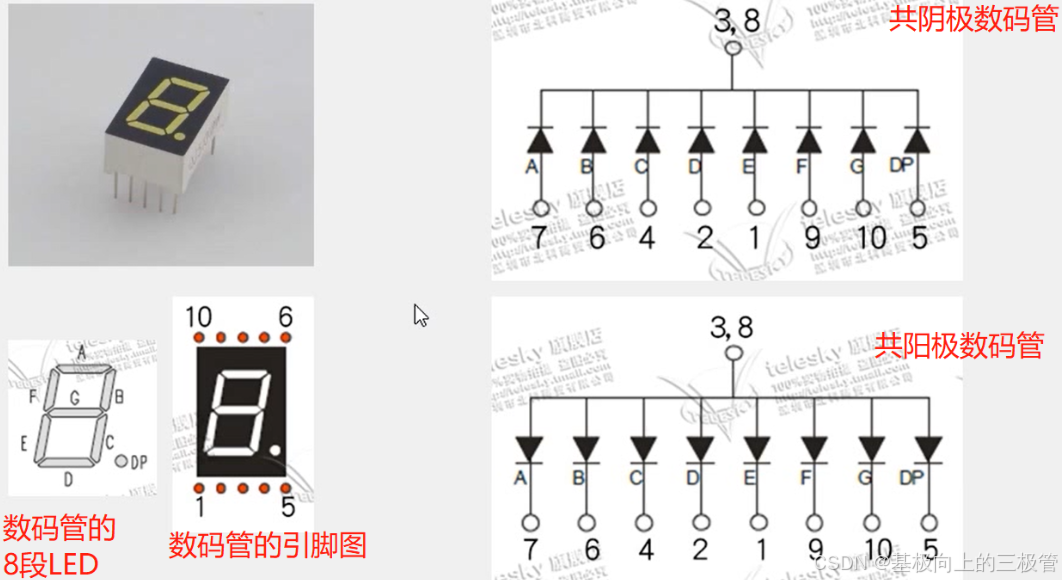
- 一位数码管
共阳极数码管:8个LED共用一个阳极
| 数字 | 编码 |
|---|---|
| 0 | 0xC0 |
| 1 | 0xF9 |
| 2 | 0xA4 |
| 3 | 0xB0 |
| 4 | 0x99 |
| 5 | 0x92 |
| 6 | 0x82 |
| 7 | 0xF8 |
| 8 | 0x80 |
| 9 | 0x90 |
| A | 0x88 |
| B | 0x83 |
| C | 0xC6 |
| D | 0xA1 |
| E | 0x86 |
| F | 0x8E |
共阴极数码管:8个LED共用一个阴极
| 数字 | 编码 |
|---|---|
| 0 | 0x3F |
| 1 | 0x06 |
| 2 | 0x5B |
| 3 | 0x4F |
| 4 | 0x66 |
| 5 | 0x6D |
| 6 | 0x7D |
| 7 | 0x07 |
| 8 | 0x7F |
| 9 | 0x6F |
| A | 0x77 |
| B | 0x7C |
| C | 0x39 |
| D | 0x5E |
| E | 0x79 |
| F | 0x71 |
- 四位一体数码管
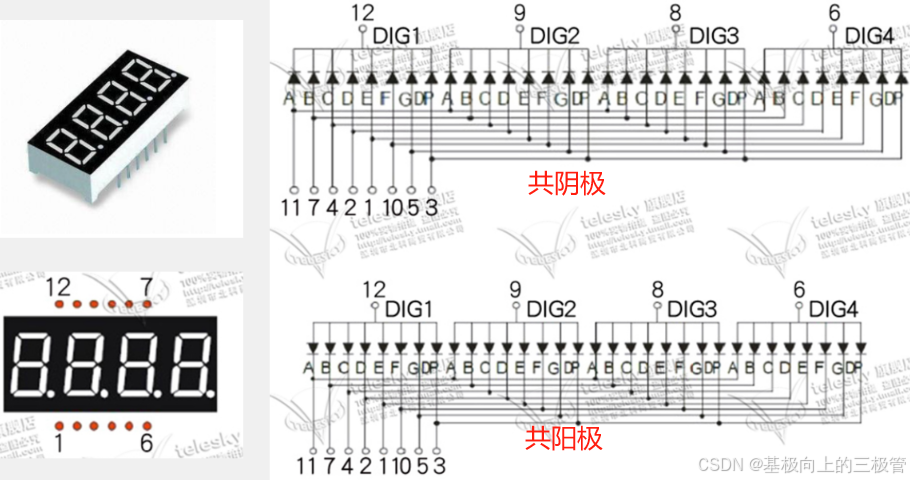
- 四位一体数码管控制方式
位选线(12,9,8,6):控制哪个数码管亮
段选线(11,7,4,2,1,10,5,3):控制数码管亮什么内容 - 芯片控制
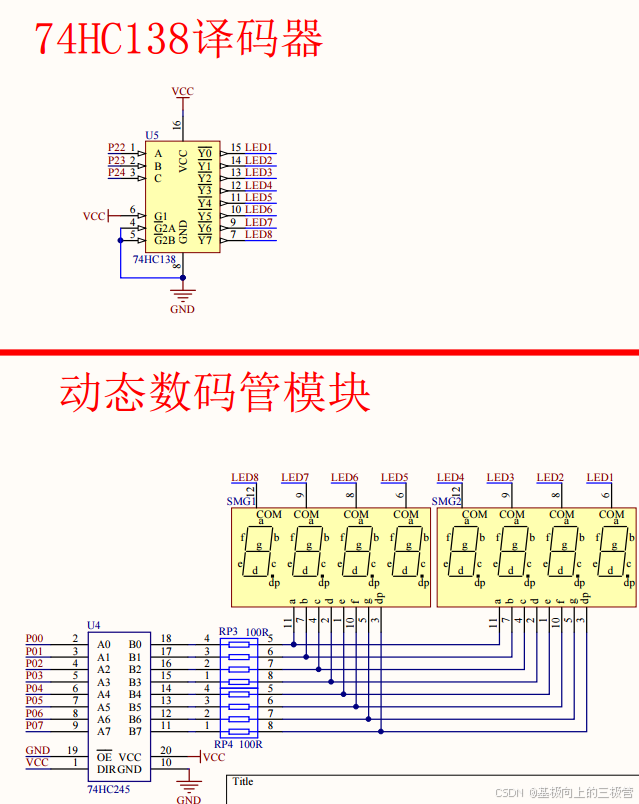
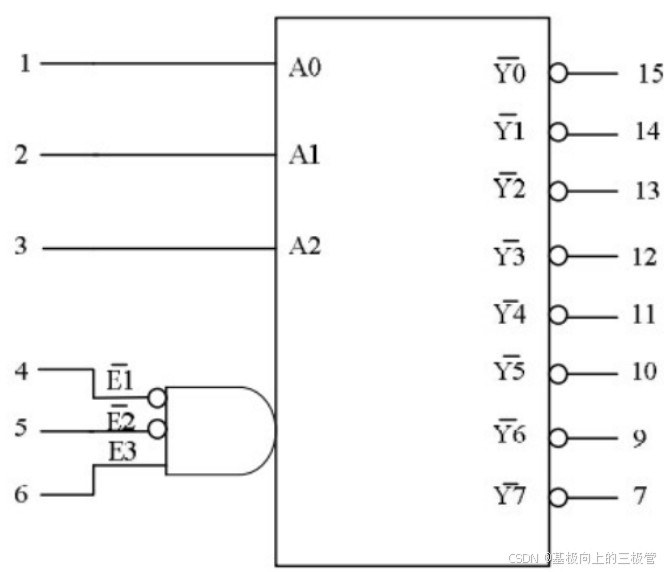
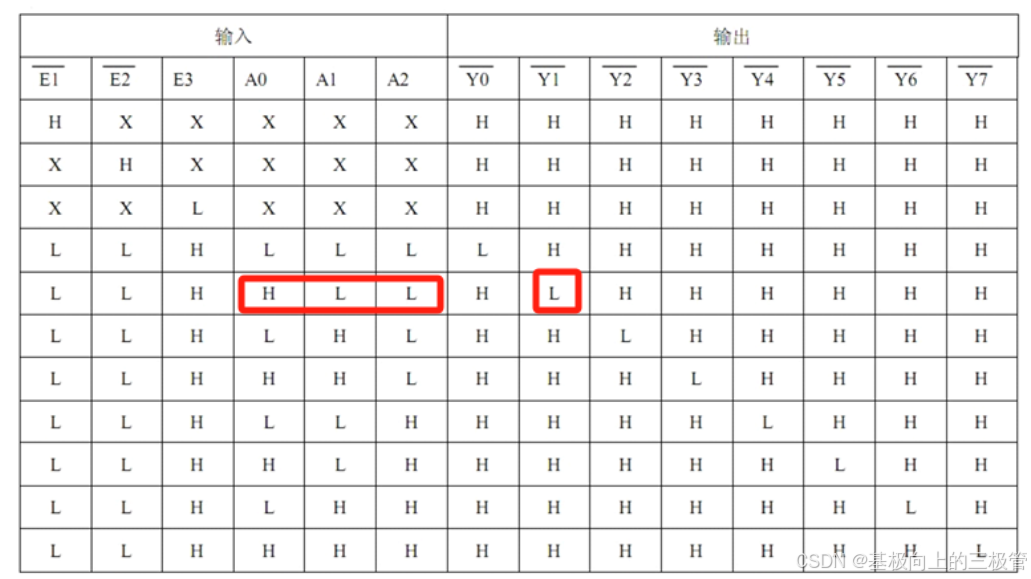
74HC138位选线控制
4,5号管脚,低电平有效;6号管脚,高电平有效。4号,5号为0,6号为1时使能
| C | B | A | 低电平位0 |
|---|---|---|---|
| 0 | 0 | 0 | Y1 |
| 1 | 0 | 0 | Y2 |
| 0 | 1 | 0 | Y3 |
| 1 | 1 | 0 | Y4 |
| 0 | 0 | 1 | Y5 |
| 1 | 0 | 1 | Y6 |
| 0 | 1 | 1 | Y7 |
| 1 | 1 | 1 | Y8 |
74HC138段选线控制
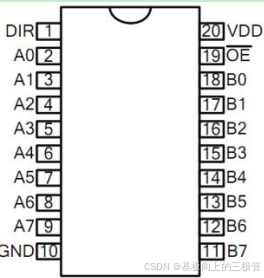
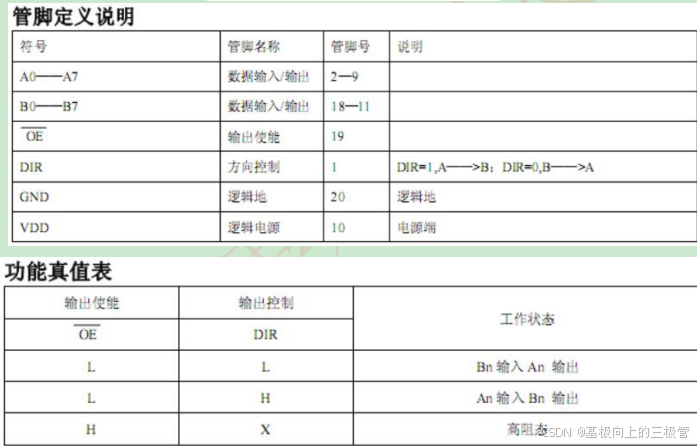
OE :使能管脚,低电平有效
DIR :高电平时传输方向是 A->B 输出;低电平时传输方向是 B->A。如果输入为低电平,输出即为低;输入为高电平,输出即为高。

















 1893
1893

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









