 基于TCRT5000的循迹小车控制系统介绍
基于TCRT5000的循迹小车控制系统介绍





目录
一、循迹模块使用
1、TCRT5000传感器的红外发射二极管不断发射红外线,当发出的红外线没有被反射回来或被反射回来但强度不太够时,红外接收管一直处于关断状态,此时模块的输出为高电平,指示二极管一直处于熄灭状态,被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和,此时模块的输出端为低电平,指示二极管被点亮
总之一句话:没反射回来,D0输出高电平,灭灯

二、接线方式
VCC:接上官一号正极(3-5V)
GND:接上官一号负极
D0:TTL开关信号输出0、1
A0:模拟信号输出(不同距离输出不同的电压,此脚一般可以不接)
三、循迹小车原理
由于黑色具有较强的吸收能力,当循迹模块发射的红外线照射到黑线时,红外线将会被黑线吸收,导致循迹模块上光敏二
0.极管处于关闭状态,此时模块上一个LED熄灭,在没有检测到黑线时,模块上两个LED常亮
总结就是一句话:有感应到黑线,D0输出高电平,灭灯
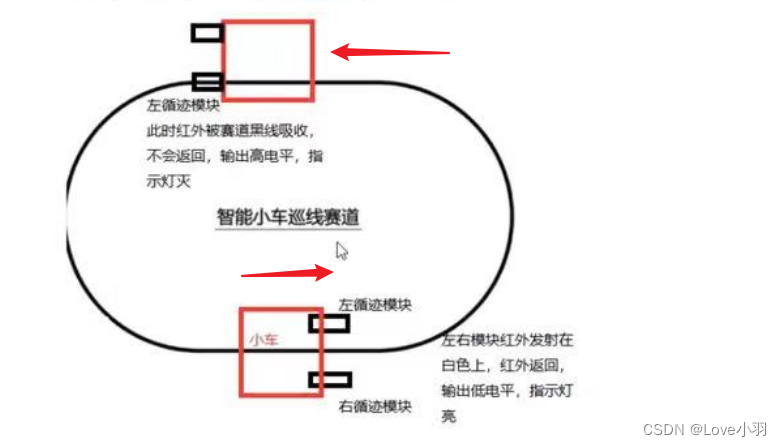
循迹模块安装在小车车头两侧
下方小车两个模块都能反射回来红外,输出低电平,灯亮,直走
上方小车左循迹模块遇到黑线,红外被吸收,左模块输出高电平,右模块输出低电平,左转,反之右转
总结:两个小绿灯都亮,那左右两边的车轮就都转动,只亮一个小绿灯的说明这侧遇到了黑线,红外被吸收,红外没有被反射回来,输出高电平,所以就不转动了。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 13万+
13万+







 到【灌水乐园】发言
到【灌水乐园】发言







