



ROS-宇树B1机械狗
操作说明
1、测试网络
测试网络(20是激光雷达的,23/24是板卡的)
ping 192.168.123.20/23/24/220
2、狗子板卡(连接-建图-导航)
(1)ssh unitree@192.168.123.24 (密码123)
(2)由本地账户更改为unitree,输入“cd UnitreeSLAM”
(3)启动建图:./build_map.sh (初始位置时设置导航点–手柄X键)
(4)启动导航:./start_patrol.sh
3、个人Pc(可视化)
(1)主目录-主文件夹-UnitreeSLAM_cart路径下进入终端
(2)建图可视化:./build_map_rviz.sh
(3)导航可视化:./start_patrol _rviz.sh
注意事项
①建图启动的时候,狗子要站立;
②设置巡航点的时候,两点之间最好是直的,中间没什么障碍。建议在需要在拐角地方定巡航点;
③最后一个巡航点,建议回到初始位置,第一个循环点;
④开启导航的时候,要让狗子尽量在第一个循环点附近,调好位置和姿态。
狗子上传与下载
狗
/home/unitree/UnitreeSLAM/catkin_lidar_slam_3d/src/ lidar_slam_3d/start/maps
本地
/home/niiddm/maps 或直接在当前路径下打开终端
删除:rm -r
参考链接:https://blog.youkuaiyun.com/ly_twt/article/details/140238064


相关问题及解决方案
1、机械狗拒绝连接
检查本地ip所属是否在192.168.123.X网段下,(ipconfg),如果不在,则需连接狗的wifi(unitree-b1-5g-xx)
2、ROS通信问题
本地电脑的bashrc文件中添加了ros_ip(192.168.123.204)和ros_master_uri(http:192.168.123.24:11311)、B1狗的bashrc文件中也有ros_ip(192.168.123.24)和ros_master_uri(http:192.168.123.24:11311)。
本地运行.build_map_rviz.sh文件,显示如下报错:
Could not contact ROS master at[http:192.168.123.24:11311],retrying...
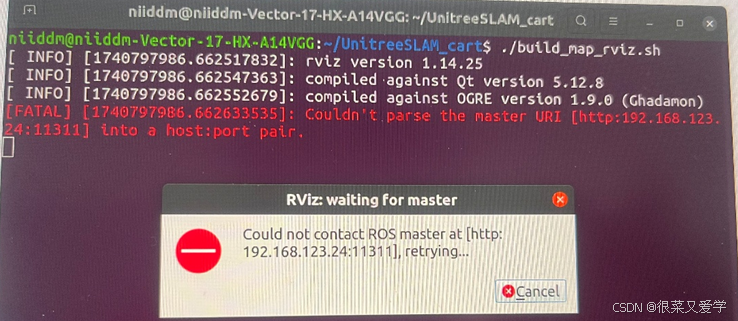
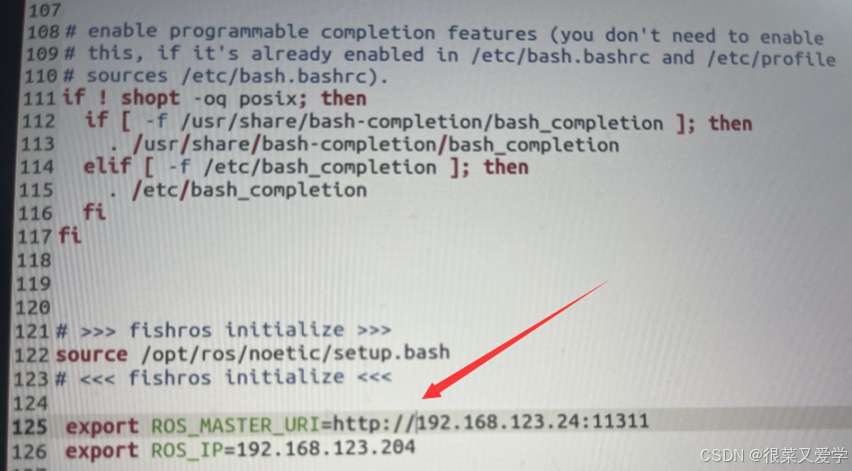
解决方案
修改本地与狗的.bashrc文件,将http:后面加上双斜杠。使用source ~/.bashrc命令,使其生效。
3、狗子趴窝,所有连接断开
狗子趴窝后,所有连接都会断开,要重新ssh unitree@192.168.123.24。这时出现如下报错:
No route to host是一个常见的网络错误消息,意味着发送方无法找到到达指定主机的路由。简单来说,就是数据包无法被送达到目标主机。

解决方案
重启狗可以解决


















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









