




 本文介绍PointNet模型在点云分类及分割任务中的应用。PointNet直接处理原始点云数据,实现3D对象分类和语义分割。文章分为五个部分详细介绍,并提供了相关代码资源。
本文介绍PointNet模型在点云分类及分割任务中的应用。PointNet直接处理原始点云数据,实现3D对象分类和语义分割。文章分为五个部分详细介绍,并提供了相关代码资源。
1.之前点云分割分类方法一般是(1)转换成规则的3D体素网络 (2)转换成图片集合
2.point直接使用点云数据作为输入
3.文章不必详细看,把整体框架看完看看代码即可(暂时)
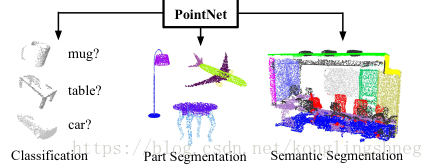
4.pointnet 分为三部分:点云分类(3D Object Classification),点云部分分割(3D Object Part Segmentation),语义分割(Semantic Segmentation in Scenes)。分类问题就是判断点云模型属于哪一类。分割问题就是判断每一个采样点属于物体的那一部分或属于哪一个物体。具体如下图所示
4.文章结构
深度学习算法的点云分割-PointNet(一) https://blog.youkuaiyun.com/tumi678/article/details/80278554
深度学习算法的点云分割-PointNet(二) https://blog.youkuaiyun.com/tumi678/article/details/80499813
深度学习算法的点云分割-PointNet(三) https://blog.youkuaiyun.com/tumi678/article/details/80499998
深度学习算法的点云分割-PointNet(四) https://blog.youkuaiyun.com/tumi678/article/details/80501515
深度学习算法的点云分割-PointNet(五) https://blog.youkuaiyun.com/tumi678/article/details/80503351
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation解析(PointNet模型)
https://blog.youkuaiyun.com/hit1524468/article/details/80023779
这些文章都写得挺好,可以参考

















 9201
9201

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









