




 本文档概述了SLAM的基础知识,包括运动和观测的概念,以及观测方程的理解。作者强调了安装Ubuntu系统和熟悉相关编程环境的重要性,推荐了安装教程和IDE选择,提醒读者为后续学习打下坚实基础。
本文档概述了SLAM的基础知识,包括运动和观测的概念,以及观测方程的理解。作者强调了安装Ubuntu系统和熟悉相关编程环境的重要性,推荐了安装教程和IDE选择,提醒读者为后续学习打下坚实基础。
目录
前言
兄弟,本章没什么难理解的东西,就是后面如果你对ubuntu不了解的话就会像我每天跟个弱智一样去网上查各种指令,唉,心酸,伤心的时候就要唱情歌~~~~~~~~~~
一、2.1—2.2内容
之间的内容详细读过,当作课外书了解下什么是SLAM。
二、2.3内容
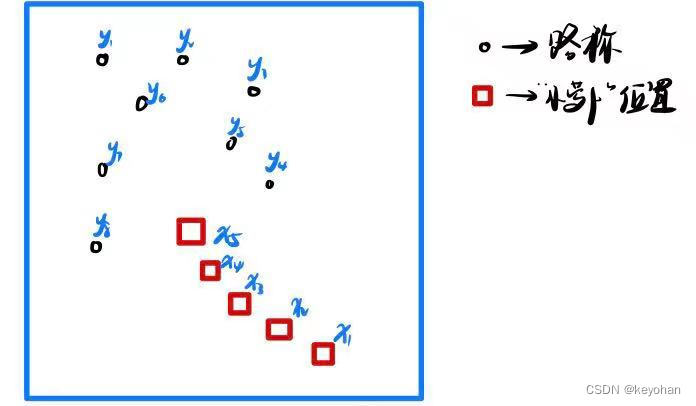
1.运动和观测概念
下面是我自己的理解图
2.观测方程
2.4式的理解如下图所示
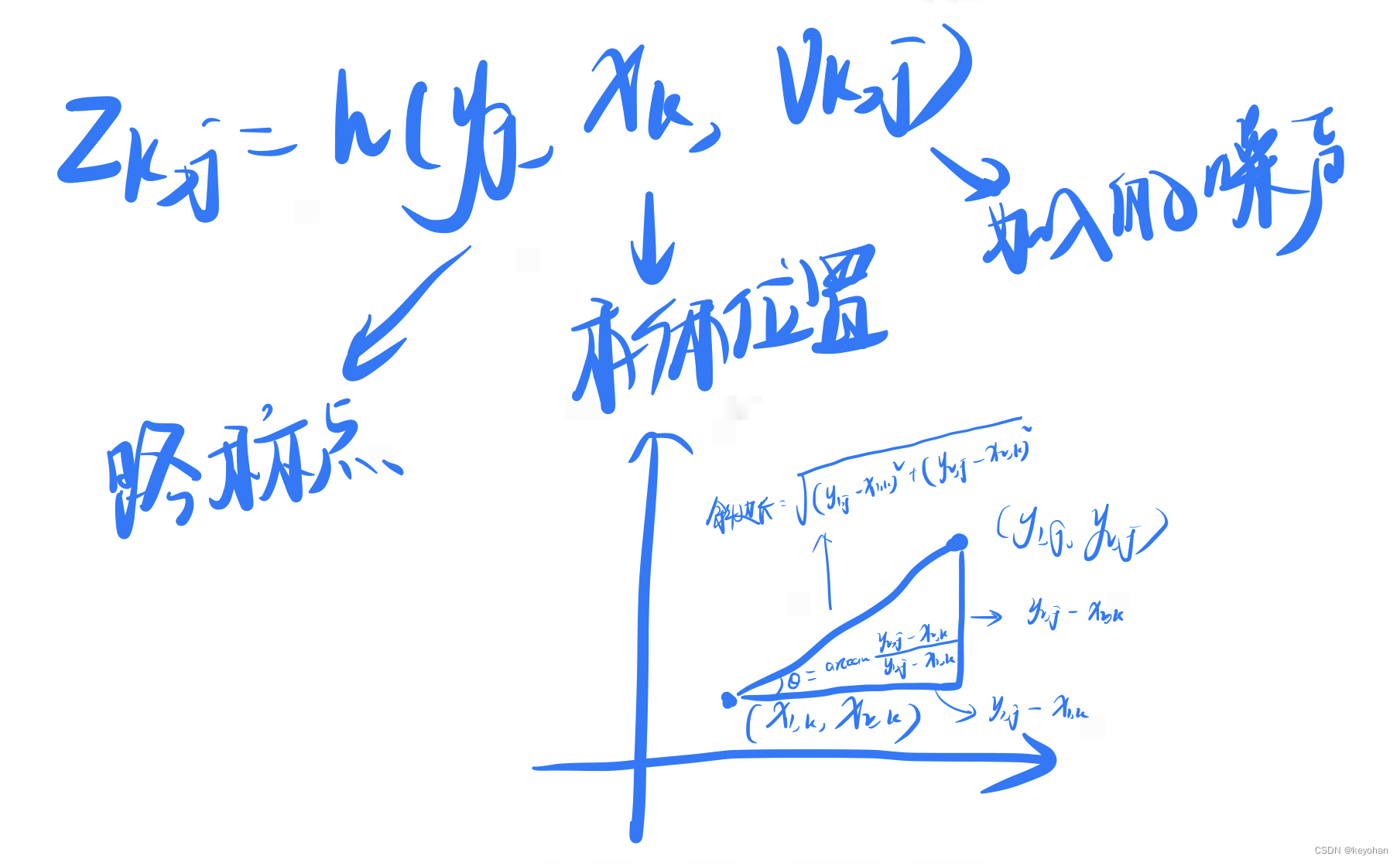
其它的内容没什么不好理解的,这部分有关SLAM的数学表达就是很基础的东西,比较直白。
三、2.4内容
- 安装ubuntu系统:建议双系统,不过电脑内存不够大的话可以用虚拟机
- 安装系统视频推荐:https://www.bilibili.com/video/BV1554y1n7zv?spm_id_from=0.0.header_right.fav_list.click&vd_source=87088711aa3eb5c4907d003ed4593e39
- 后面运行各种程序包括使用cmake等,如果你对ubuntu系统很熟悉,就特别简单,如果不熟悉,可以去看看一些ubuntu教程,例如《鸟哥的linux私房菜》等,其实我最开始啥也没看,就是一点点在网上查,后面熟悉了就好了
- IDE的使用:推荐vscode或clion。clion付费,如果是学生可以利用学生邮箱免费使用1年,当然网上也有很多你懂得的激活教程,但都很鸡肋,所以vscode它不香吗?啊?它不香吗?
总结
本章基本都是准备工作,一定要把本书的起步的编程环境搞好,否则后面,呵! 你绝对会砸电脑!!!

















 1534
1534


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言








