




引言:为什么李想说汽车是物理世界人工智能最大的应用?
人工智能正以前所未有的速度重塑世界,但若问人工智能在物理世界最大的应用场景是什么,答案可能出乎意料:智能电动车。
比亚迪董事长兼总裁王传福曾说过:新能源智能电动车发展,“上半场是电动化,下半场是智能化”。智能电动车不仅是交通工具,更是连接物理与数字世界的桥梁。它需要实时处理海量环境数据、做出复杂决策、与人类深度交互——这些挑战让智能电动车成为人工智能技术落地的“终极考场”。
本文将以理想汽车为例,论证为何智能电动车是物理世界人工智能最大的应用。
理想同学:从车载助手到“家人”
“理想同学”不仅仅是一个简单的车载语音助手,在理想自研的MindGPT大模型的加持下,它在智能互动和儿童互动方面展现出了独特的能力,尤其是在车端应用上,为用户带来了全新的体验。
智能互动的独特能力
1. 联网搜索
理想同学能够与即时联网搜索的无缝融合。这意味着用户除了可以给出直接指令,也可以通过说像“前挡脏了”来启动前挡风玻璃清洁和“我很热”来调节空调。也可以通过说一段歌词来搜歌或说一段台词/桥段来搜剧。还可以把它当成百科全书和新闻播客。它也完美支持连续语音和方言。
2. 多模态交互
理想同学支持全舱自由对话,能够识别多种方言,并融合视觉感知实现多模态互动。例如,它可以通过RGB摄像头和多模态感知技术,识别用户的手势和表情,从而提供更加自然和人性化的交互体验。比如,用户可以指着车顶说“打开这个”,从而打开用户头顶上方的那块电动遮阳帘,而不用说“打开后方遮阳帘”这么累赘的语言。
与儿童互动的独特能力
“理想同学”可能是很多理想车主孩子第一个接触的人工智能。
1. 趣味互动与教育功能
理想同学在儿童模式下提供了丰富的互动功能,包括问答、游戏和动画播放。它能够回答孩子的问题,提供趣味知识,甚至帮助孩子完成绘画或作业。这种功能不仅让孩子在车内不再无聊,不再打扰司机,还通过寓教于乐的方式促进孩子的成长。
2. 精准识别与适应性
理想同学基于自研的MIMO-NET 2.0多模态人声分离算法和MSE-NET 2.0语音感知算法,能够精准识别儿童的语音。即使孩子的表达不够规范,理想同学也能理解并给出合适的回应,真正成为孩子们的知心伙伴。
智能驾驶:端到端大模型加持后的突飞猛进
智能驾驶能力不是升级,而是颠覆
笔者从2024年4月换购理想L8 Max,其搭载的AD Max智能驾驶系统,在短短不到一年的时间,智能驾驶能力的进步可谓突飞猛进,肉眼可见。
从一开始依赖高精地图,NOA(Navigate on Autopilot,“领航辅助驾驶”。高级驾驶辅助功能,结合了车辆的导航系统和自动驾驶辅助技术,实现自动变道、自动进出匝道、自动超车等功能)只能在有高精地图覆盖的地方(基本上是高速与快速路)使用,到“全国都能开”(能开但不好用)。
受特斯拉FSD v12的启发,理想在2024年中技术路线果断从人工写规则算法,切换到基于数据训练的端到端大模型后,今天已经实现“车位到车位”哪里都能用的NOA能力,理论上可以从出发地到目的地,全程交给智能驾驶。迅速跻身国内智驾能力第一梯队。
它的主要实现方式是:
· 端到端+VLM双系统:结合视觉语言模型(VLM)与端到端学习,车辆能像人类一样理解复杂环境(如施工路段、环岛)并自主决策。
· 数据驱动进化:目前训练里程达29亿公里,已经实现从北京到太原500公里零接管的能力。
安全革命:主动避免事故才是最大的安全
· 推理可视化:智能驾驶,特别是引入端到端大模型后,其决策过程似乎成了“黑盒子”,让人无法判断其决策的合理性,会让不熟悉其能力的人望而却步,拒绝使用。理想最新OTA引入了智能驾驶推理可视化,把智能驾驶系统的整个推理过程在屏幕上实时展现。让司机和乘客能明明白白看到智能驾驶系统是如何决策,包括路线选择、注意力热图和视觉语言模型VLM对前方事物的解读。
· 事故预防能力:通过AES(自动紧急绕行)、AEB(自动紧急制动)、等技术,仅2025年春节期间,帮助车主们避免潜在事故高达17.66万次!
“消失的前车”是笔者亲身经历过的场景。
当时开着以前的油车,在高速上正常行驶,突然看到前车切实线绕到右边车道,当我正在疑惑它的怪异行为时,发现前面有车辆停在路上。我本能地打方向,同样切实线绕开,但当时完全没有时间观察右方是否有车。虽然最终成功脱险,但如果当时右方有车,必然是重大交通事故。而当时如果没有绕开,也可能会撞到前车或者被后车追尾。
在这种千钧一发的场景下,利用车身上安装的多个摄像头和雷达,以及高算力智驾芯片的主动安全系统,不管是视野还是响应能力,都会超出人类的能力,相信AES和AEB会做出更安全的决策。
从“驾驶”到“移动空间”的范式转移
李想提出,未来的智能电动车将是“空间机器人”——当你上车后,人工智能不仅负责驾驶,还能根据日程自动规划路线、调整车内环境(如温度、音乐),甚至帮孩子辅导作业。这种设想背后,是人工智能对物理空间的全面掌控能力。
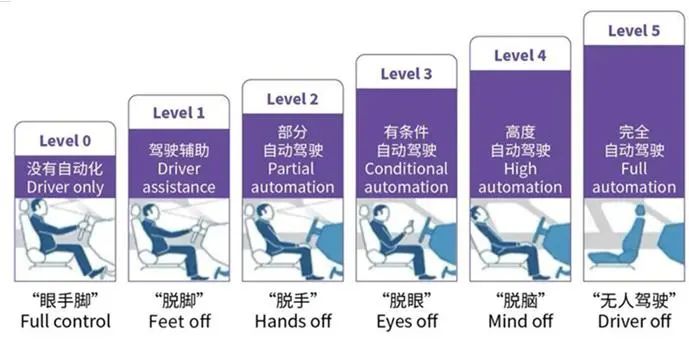
自动驾驶分级
我以前也觉得L3、L4是遥不可及的事情。但是亲身经历过理想去年智能驾驶的进步还有人工智能的发展我觉得这个都会是很近的事情。
有了L3,在很多情况下,司机在车辆行驶过程中都可以脱眼了。在不想开车的场景下(比如长途和堵车时),在车里煲剧肯定比时刻盯着路面香。
有了L4,车子可以自己去执行任务了,今天很多难题可以解决,比如停车难、充电等。到了目的地,人下车,车子自己跑去解决问题。要走的时候,让车子自己来接。去机场、高铁站都可以让自己的车子接送。
总结
李想在2024年人工智能 Talk提到:“车是个无接触机器人,而且道路是标准化的,包括道路上的提示和参与者都是标准化的,每个人都受交通规则的训练,这已经是最简单的人工智能机器人。”
当智能电动车这个物理世界人工智能最大的应用更加成熟后(比如L4自动驾驶的实现),“硅基家人”将是下一个可以畅想的应用。
DeepSeek的经济性和对算力的低要求,也使大模型上车多了一个选择,有可能推动智能电动车能力的进一步发展。
文末互动:
你认为人工智能会让驾驶更安全还是更危险?
你期待完全自动驾驶的智能电动车吗?
你期待有“硅基家人”的帮助和陪伴吗?
欢迎留言,与10万+读者一起探讨未来!
如果您对理想汽车感兴趣,请点击阅读原文预约试驾体验。

参考文献:理想智能电动车2024 人工智能 Talk发布会内容、搜狐智能电动车、网易科技等媒体报道。
觉得文章不错,顺手点个“点赞”、“在看”或转发给朋友们吧,欢迎留言讨论。

相关阅读:
关注公众号看其它原创作品

















 1976
1976

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









