




配置环境
Visual Studio Code :版本1.98.2
ESP32:ESP32-S3
ESP-IDF:V5.4
姿态传感器:MPU6050和MPU6500都适用
驱动:DMP驱动
通讯协议:采用I2C
介绍


产品概述
MPU - 6500 /MPU - 6050是一款 6 轴运动跟踪设备,它将一个 3 轴陀螺仪、一个 3 轴加速度计和一个数字运动处理器(Digital Motion Processor™,DMP)集成在一个 3×3×0.9mm 的小型封装中。它还具有一个 512 字节的先进先出(FIFO)缓冲区,可降低串行总线接口的通信流量,并通过允许系统处理器突发读取传感器数据,然后进入低功耗模式来降低功耗。凭借其专用的 I²C 传感器总线,MPU - 6500 可直接接受来自外部 I²C 设备的输入。通过其 6 轴集成、片上 DMP 和运行时校准固件,使制造商能够省去离散设备昂贵且复杂的选择、鉴定和系统级集成过程,为消费者保证最佳的运动性能。 还设计用于通过其辅助 I²C 端口与多个非惯性数字传感器(如压力传感器)连接。
陀螺仪的可编程满量程范围为 ±250、±500、±1000 和 ±2000 度 / 秒,在 0.01dps/√Hz 时具有极低的速率噪声。加速度计具有用户可编程的满量程范围,分别为 ±2g、±4g、±8g 和 ±16g。两个传感器的出厂校准初始灵敏度降低了生产线校准的要求。
其他行业领先的特性包括片上 16 位模数转换器(ADCs)、可编程数字滤波器、在 - 40°C 至 85°C 温度范围内漂移为 1% 的精密时钟、嵌入式温度传感器和可编程中断。该设备具有 I²C 和 SPI 串行接口,VDD 工作电压范围为 1.71 至 3.6V,以及独立的数字 I/O 电源 VDDIO,其电压范围为 1.71V 至 3.6V。
与该设备所有寄存器的通信可使用 400kHz 的 I²C 或 1MHz 的 SPI 进行。对于需要更快通信速度的应用,传感器和中断寄存器可使用 20MHz 的 SPI 进行读取。
通过利用其专利且经过大量验证的 CMOS - MEMS 制造平台(该平台通过晶圆级键合将 MEMS 晶圆与配套的 CMOS 电子器件集成在一起),InvenSense 将封装尺寸缩小至 3×3×0.90mm(24 引脚 QFN)的占地面积和厚度,提供了一种尺寸小、性能高且成本低的封装。该设备支持 10,000g 的冲击可靠性,具有高度的稳健性。
特性
陀螺仪特性
MPU - 6500 /MPU - 6050中的三轴 MEMS 陀螺仪具有多种特性:
- 数字输出的 X、Y 和 Z 轴角速率传感器(陀螺仪),用户可编程的满量程范围为 ±250、±500、±1000 和 ±2000°/ 秒,并集成 16 位 ADCs。
- 数字可编程低通滤波器。
- 陀螺仪工作电流:3.2mA。
- 工厂校准的灵敏度比例因子。
- 自检功能。
2.2 加速度计特性
三轴 MEMS 加速度计具有多种特性:
- 数字输出的 X、Y 和 Z 轴加速度计,可编程满量程范围为 ±2g、±4g、±8g 和 ±16g,并集成 16 位 ADCs。
- 加速度计正常工作电流:450µA。
- 低功耗加速度计模式电流:在 0.98Hz 时为 6.37µA,在 31.25Hz 时为 17.75µA。
- 用户可编程中断。
- 用于应用处理器低功耗操作的运动唤醒中断。
- 自检功能。
2.3 其他特性
MPU - 6500 /MPU - 6050 还具有以下特性:
- 辅助主 I²C 总线,用于从外部传感器(如磁力计)读取数据。当所有 6 个运动传感轴均处于活动状态时,工作电流为 3.4mA。
- VDD 电源电压范围为 1.8 - 3.3V ± 5%。
- 辅助 I²C 设备的 VDDIO 参考电压为 1.8 - 3.3V ± 5%。
- 适用于便携式设备的最小最薄 QFN 封装:3×3×0.9mm。
- 加速度计和陀螺仪轴之间的交叉轴灵敏度极低。
- 512 字节 FIFO 缓冲区,使应用处理器能够突发读取数据。
- 数字输出温度传感器。
- 用户可编程的陀螺仪、加速度计和温度传感器数字滤波器。
- 耐受 10,000g 冲击。
- 用于与所有寄存器通信的 400kHz 快速模式 I²C。
- 用于与所有寄存器通信的 1MHz SPI 串行接口。
- 用于读取传感器和中断寄存器的 20MHz SPI 串行接口。
- MEMS 结构在晶圆级进行密封和键合。
- 符合 RoHS 标准且环保。
2.4 运动处理
内部数字运动处理(Digital Motion Processing™,DMP™)引擎支持先进的运动处理和低功耗功能,例如使用可编程中断进行手势识别。
除了角速率之外,该设备还可选输出角位置(角度)。
低功耗计步器功能允许主机处理器在 DMP 维持步数计数时进入睡眠状态。
管脚定义
以MPU6500为例
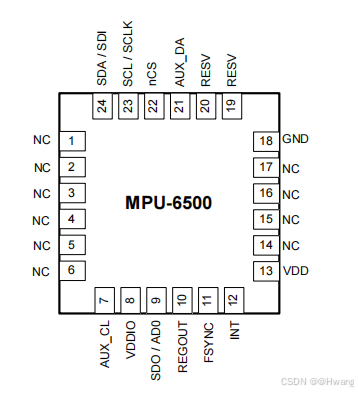
| 引脚编号 | 引脚名称 | 引脚描述 |
|---|---|---|
| 1 - 6、14 - 17 | NC | 无连接引脚,请勿连接 |
| 7 | AUX_CL | I²C 主串行时钟,用于连接外部传感器 |
| 8 | VDDIO | 数字 I/O 电源电压 |
| 9 | AD0 / SDO | I²C 从机地址最低位(AD0);SPI 串行数据输出(SDO) |
| 10 | REGOUT | 调节器滤波电容连接端 |
| 11 | FSYNC | 帧同步数字输入。若未使用,连接至地 |
| 12 | INT | 中断数字输出(图腾柱或开漏输出)。中断线应连接至应用处理器(AP)上能使 AP 退出暂停模式的引脚 |
| 13 | VDD | 电源电压和数字 I/O 电源电压 |
| 18 | GND | 电源地 |
| 19 | RESV | 保留引脚,请勿连接 |
| 20 | RESV | 保留引脚,连接至地 |
| 21 | AUX_DA | I²C 主串行数据,用于连接外部传感器 |
| 22 | nCS | 片选(仅 SPI 模式) |
| 23 | SCL / SCLK | I²C 串行时钟(SCL);SPI 串行时钟(SCLK) |
| 24 | SDA / SDI | I²C 串行数据(SDA);SPI 串行数据输入(SDI) |
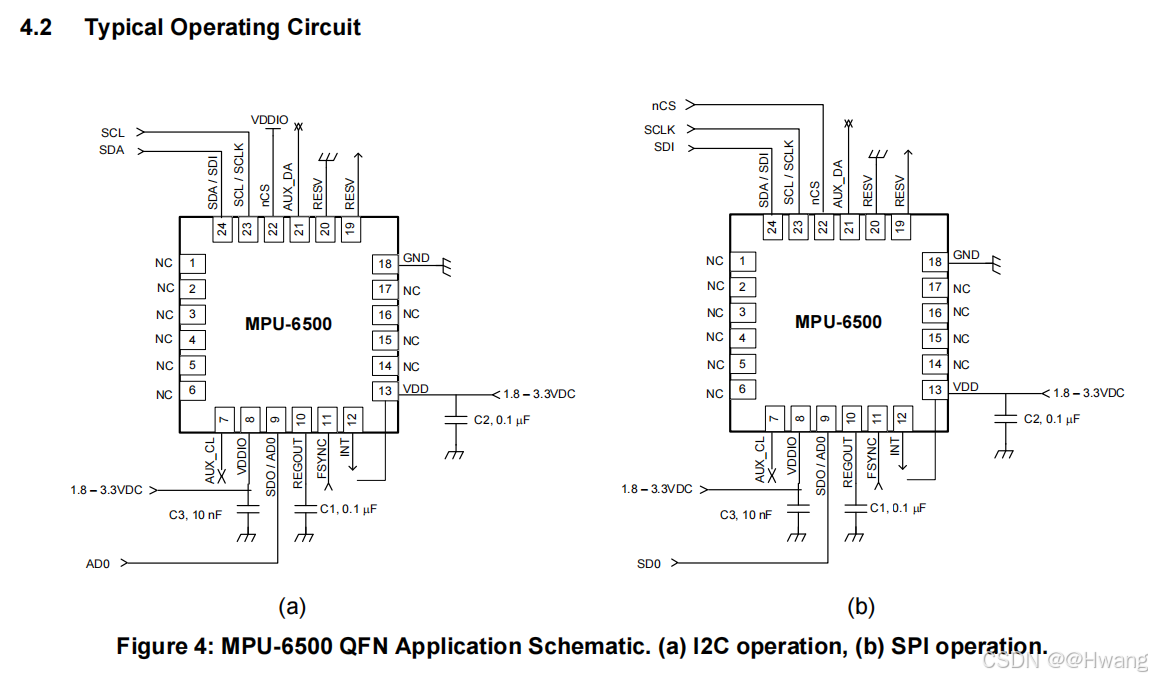
典型电路图
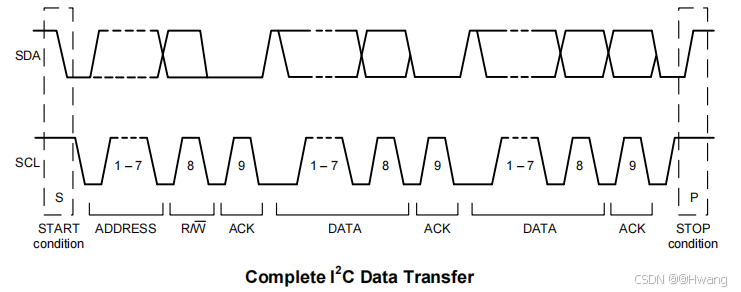
I2C 协议通讯
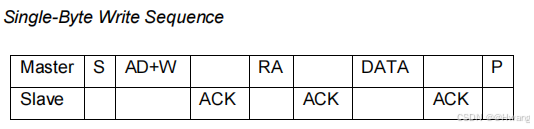
写数据
写单个数据
写多个数据

读数据
读单个数据

读多个数据

驱动代码
I2C配置
进行I2C的IO口配置,读写函数的封装
mpu_i2c.h
#ifndef __MPU6_I2C_H
#define __MPU6_I2C_H
#include "driver/i2c_master.h"
#include "driver/gpio.h"
#include "esp_log.h"
#include "esp_err.h"
#define MPU_SDA GPIO_NUM_41
#define MPU_SCL GPIO_NUM_42
#define MPU_ADDR 0x68 //设备地址,AD0->0时地址位0x68,AD0->1时地址位0x69,
#define MPU_SCL_SPEED 100000 //SCK时钟频率,100K
esp_err_t mpu_i2c_init(); //I2C 初始化
esp_err_t mpu_write_byte(uint8_t reg,uint8_t byte); //I2C 写一byte数据
esp_err_t mpu_write_buf(uint8_t reg,uint16_t write_len,uint8_t *buf);//I2C 写一buf数据
uint8_t mpu_read_byte(uint8_t reg); //I2C 读byte数据
esp_err_t mpu_read_buf(uint8_t reg,uint16_t read_len,uint8_t *read_buf); ////I2C 读一buf数据
#endif
mpu_i2c.c
#include "mpu_i2c.h"
i2c_master_bus_handle_t bus_handle;
i2c_master_dev_handle_t dev_handle;
static const char *TAG = "MPU_I2C";
esp_err_t mpu_i2c_init()
{
esp_err_t err;
i2c_master_bus_config_t i2c_mst_config = {
.clk_source = I2C_CLK_SRC_DEFAULT,
.i2c_port = I2C_NUM_0, //I2C 0
.scl_io_num = MPU_SCL,
.sda_io_num = MPU_SDA,
.glitch_ignore_cnt = 7,
.flags.enable_internal_pullup = true,
};
err = i2c_new_master_bus(&i2c_mst_config, &bus_handle);
if(err != ESP_OK){
ESP_LOGE(TAG, "i2c master init failed: %s", esp_err_to_name(err));
}
i2c_device_config_t dev_cfg = {
.dev_addr_length = I2C_ADDR_BIT_LEN_7, //I2C 地址位长度,7
.device_address = MPU_ADDR, //I2C 地址
.scl_speed_hz = MPU_SCL_SPEED, //SCL 时钟速度
.scl_wait_us = 10,
};
err = i2c_master_bus_add_device(bus_handle, &dev_cfg, &dev_handle);
if(err != ESP_OK){
ESP_LOGE(TAG, "i2c add device failed: %s", esp_err_to_name(err));
}
ESP_LOGI(TAG, "i2c init ok");
return err;
}
/// @brief MPU60xx,在指定寄存器写入一个数据
/// @param reg 寄存器
/// @param byte 数据
/// @return esp_err_t 写入状态
esp_err_t mpu_write_byte(uint8_t reg,uint8_t byte)
{
uint8_t date[2]={reg,byte};
esp_err_t err = i2c_master_transmit(dev_handle,date,2,-1);
if(err != ESP_OK){
ESP_LOGE(TAG, "i2c master transmit failed: %s", esp_err_to_name(err));
}
return err;
}
/// @brief MPU60xx,在指定寄存器写入一串数据
/// @param reg 寄存器
/// @param write_len 写入的长度
/// @param buf 数据组
/// @return esp_err_t 写入状态
esp_err_t mpu_write_buf(uint8_t reg,uint16_t write_len,uint8_t *buf)
{
uint8_t write_buf[write_len+1];
write_buf[0] = reg;
for(uint16_t i=0;i<write_len;i++){
write_buf[i+1] = buf[i];
}
esp_err_t err = i2c_master_transmit(dev_handle,write_buf,write_len+1,-1);
if(err != ESP_OK){
ESP_LOGE(TAG, "i2c master transmit failed: %s", esp_err_to_name(err));
}
return err;
}
/// @brief 读取指定寄存器数据,读一个
/// @param reg 寄存器地址
/// @return 读取的数据
uint8_t mpu_read_byte(uint8_t reg)
{
uint8_t read_byte=0;
esp_err_t err = i2c_master_transmit_receive(dev_handle, ®, 1,&read_byte,1,-1);
if(err != ESP_OK){
ESP_LOGE(TAG, "i2c master receive failed: %s", esp_err_to_name(err));
return 0;
}
return read_byte;
}
esp_err_t mpu_read_buf(uint8_t reg,uint16_t read_len,uint8_t *read_buf)
{
esp_err_t err = i2c_master_transmit_receive(dev_handle, ®, 1,read_buf,read_len, -1);
if(err != ESP_OK){
ESP_LOGE(TAG, "i2c master receive failed: %s", esp_err_to_name(err));
}
return err;
}
MPU配置
进行MPU的初始化,相关寄存器的配置,获取始数数据函数的封装
mpu60xx.h
#ifndef __MPU60xx_H
#define __MPU60xx_H
//说明: 支持MPU6050 ,和MPU6500
#include "esp_log.h"
#include "esp_err.h"
#include "mpu_i2c.h"
#define MPU_SELF_TESTX_REG 0X0D //自检寄存器X
#define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y
#define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z
#define MPU_SELF_TESTA_REG 0X10 //自检寄存器A
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器
#define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器
#define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器
#define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器
#define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器
#define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器
#define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器
#define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器
#define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_INT_STA_REG 0X3A //中断状态寄存器
#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器
#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器
#define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器
#define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器
#define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器
#define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器
#define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器
#define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器
#define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位
#define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位
#define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器
#define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器
esp_err_t mpu60xx_init(void);
void mpu60xx_delay_ms(uint32_t cms);
esp_err_t mpu60xx_set_gyro_fsr(uint8_t fsr); //设置MPU6050陀螺仪传感器满量程范围
esp_err_t mpu60xx_set_accel_fsr(uint8_t fsr); //设置MPU6050加速度传感器满量程范围
esp_err_t mpu60xx_set_lfp(uint16_t lpf); //设置MPU6050的数字低通滤波器
esp_err_t mpu60xx_set_rate(uint16_t rate); //设置MPU6050的采样率(假定Fs=1KHz)
float mpu60xx_get_temperature(void); //得到温度值
esp_err_t mpu60xx_get_gyroscope(short *gx,short *gy,short *gz); //得到陀螺仪值(原始值)
esp_err_t mpu60xx_get_accelerometer(short *ax,short *ay,short *az);//得到加速度值(原始值)
#endif
mpu60xx.c
#include "mpu60xx.h"
#include"freertos/FreeRTOS.h"
static const char *TAG = "MPU";
//ms延时函数,调用freertos的延时函数
void mpu60xx_delay_ms(uint32_t cms)
{
TickType_t xDelay = cms / portTICK_PERIOD_MS;
vTaskDelay( xDelay );
}
/// @brief mpu初始化,相关寄存器的配置
/// @param 无
/// @return ESP_OK,成功;其他,失败
esp_err_t mpu60xx_init(void)
{
esp_err_t err = mpu_i2c_init();
if(err != ESP_OK){
return err;
}
mpu_write_byte(MPU_PWR_MGMT1_REG,0x80);//复位MPU6050
mpu60xx_delay_ms(100);
mpu_write_byte(MPU_PWR_MGMT1_REG,0X00);//唤醒MPU6050
mpu60xx_set_gyro_fsr(3); //陀螺仪传感器,±2000dps
mpu60xx_set_accel_fsr(0); //加速度传感器,±2g
mpu60xx_set_rate(50); //设置采样率50Hz
mpu_write_byte(MPU_INT_EN_REG,0X00); //关闭所有中断
mpu_write_byte(MPU_USER_CTRL_REG,0X00); //I2C主模式关闭
mpu_write_byte(MPU_FIFO_EN_REG,0X00); //关闭FIFO
mpu_write_byte(MPU_INTBP_CFG_REG,0X80); //INT引脚低电平有效
uint8_t res=mpu_read_byte(MPU_DEVICE_ID_REG);
if(res==MPU_ADDR)//器件ID正确
{
mpu_write_byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考
mpu_write_byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作
mpu60xx_set_rate(50); //设置采样率为50Hz
ESP_LOGI(TAG, "mpu init ok ");
}
else return ESP_FAIL;
return err;
}
#pragma region MPU60xx
/// @brief 设置MPU6050陀螺仪传感器满量程范围
/// @param fsr 0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
/// @return ESP_OK,设置成功;其他,设置失败
esp_err_t mpu60xx_set_gyro_fsr(uint8_t fsr)
{
return mpu_write_byte(MPU_GYRO_CFG_REG,fsr<<3);//设置陀螺仪满量程范围
}
/// @brief 设置MPU6050加速度传感器满量程范围
/// @param fsr 0,±2g;1,±4g;2,±8g;3,±16g
/// @return
esp_err_t mpu60xx_set_accel_fsr(uint8_t fsr)
{
return mpu_write_byte(MPU_ACCEL_CFG_REG,fsr<<3);//设置加速度传感器满量程范围
}
/// @brief 设置MPU6050的数字低通滤波器
/// @param lpf 数字低通滤波频率(Hz)
/// @return ESP_OK,设置成功;其他,设置失败
esp_err_t mpu60xx_set_lfp(uint16_t lpf)
{
uint8_t data=0;
if(lpf>=188)data=1;
else if(lpf>=98)data=2;
else if(lpf>=42)data=3;
else if(lpf>=20)data=4;
else if(lpf>=10)data=5;
else data=6;
return mpu_write_byte(MPU_CFG_REG,data);//设置数字低通滤波器
}
/// @brief 设置MPU6050的采样率(假定Fs=1KHz)
/// @param rate 4~1000(Hz)
/// @return ESP_OK,设置成功,其他,设置失败
esp_err_t mpu60xx_set_rate(uint16_t rate)
{
uint8_t data;
if(rate>1000)rate=1000;
if(rate<4)rate=4;
data=1000/rate-1;
data=mpu_write_byte(MPU_SAMPLE_RATE_REG,data); //设置数字低通滤波器
return mpu60xx_set_lfp(rate/2); //自动设置LPF为采样率的一半
}
/// @brief 得到温度值
/// @param 无
/// @return 温度值(扩大了100倍)
float mpu60xx_get_temperature(void)
{
uint8_t buf[2];
short raw;
float temp;
mpu_read_buf(MPU_TEMP_OUTH_REG,2,buf);
raw=((uint16_t)buf[0]<<8)|buf[1];
temp=36.53+((double)raw)/340;
return temp;
}
/// @brief 得到陀螺仪值(原始值)
/// @param gx 陀螺仪x轴的原始读数(带符号)
/// @param gy 陀螺仪y轴的原始读数(带符号)
/// @param gz 陀螺仪z轴的原始读数(带符号)
/// @return ESP_OK,成功,其他,失败
esp_err_t mpu60xx_get_gyroscope(short *gx,short *gy,short *gz)
{
uint8_t buf[6];
esp_err_t res;
res=mpu_read_buf(MPU_GYRO_XOUTH_REG,6,buf);
if(res==0)
{
*gx=((uint16_t)buf[0]<<8)|buf[1];
*gy=((uint16_t)buf[2]<<8)|buf[3];
*gz=((uint16_t)buf[4]<<8)|buf[5];
}
return res;
}
/// @brief 得到加速度值(原始值)
/// @param ax 陀螺仪x轴的原始读数(带符号)
/// @param ay 陀螺仪y轴的原始读数(带符号)
/// @param az 陀螺仪z轴的原始读数(带符号)
/// @return ESP_OK,成功,其他,失败
esp_err_t mpu60xx_get_accelerometer(short *ax,short *ay,short *az)
{
uint8_t buf[6];
esp_err_t res=mpu_read_buf(MPU_ACCEL_XOUTH_REG,6,buf);
if(res==0)
{
*ax=((uint16_t)buf[0]<<8)|buf[1];
*ay=((uint16_t)buf[2]<<8)|buf[3];
*az=((uint16_t)buf[4]<<8)|buf[5];
}
return res;;
}
#pragma endregion
验证
main.c
#include <stdio.h>
#include "esp_log.h"
#include"freertos/FreeRTOS.h"
#include"freertos/task.h"
static const char* TAG = "Main";
void mpu60xx_test()
{
float pitch=0,roll=0,yaw=0; //欧拉角
short aacx,aacy,aacz; //加速度传感器原始数据
short gyrox,gyroy,gyroz; //陀螺仪原始数据
float temp; //温度
if(mpu60xx_get_accelerometer(&aacx,&aacy,&aacz)==ESP_OK){
temp=mpu60xx_get_temperature(); //得到温度值
//mpu60xx_get_accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据
mpu60xx_get_gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据
printf("%.02f,%0d,%d,%d,%d,%d,%d\r\n",temp,aacx,aacy,aacz,gyrox,gyroy,gyroz);
}
}
void app_main(void)
{
while(mpu60xx_init())
{
bsp_delay_ms(500);
ESP_LOGI(TAG,"mpu init failed");
}
while(1)
{
mpu60xx_test();
vTaskDelay(pdTICKS_TO_MS(10));
}
}
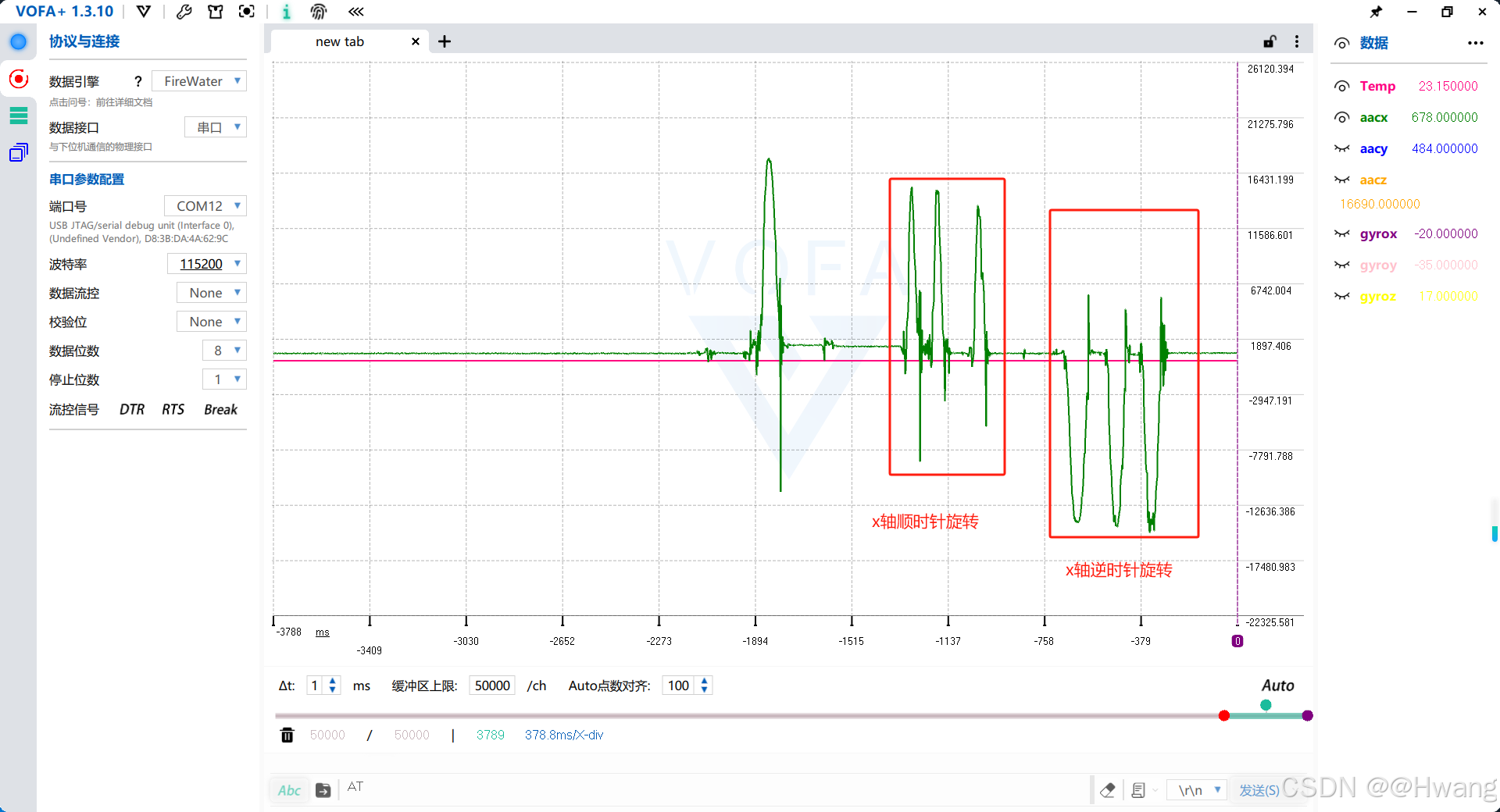
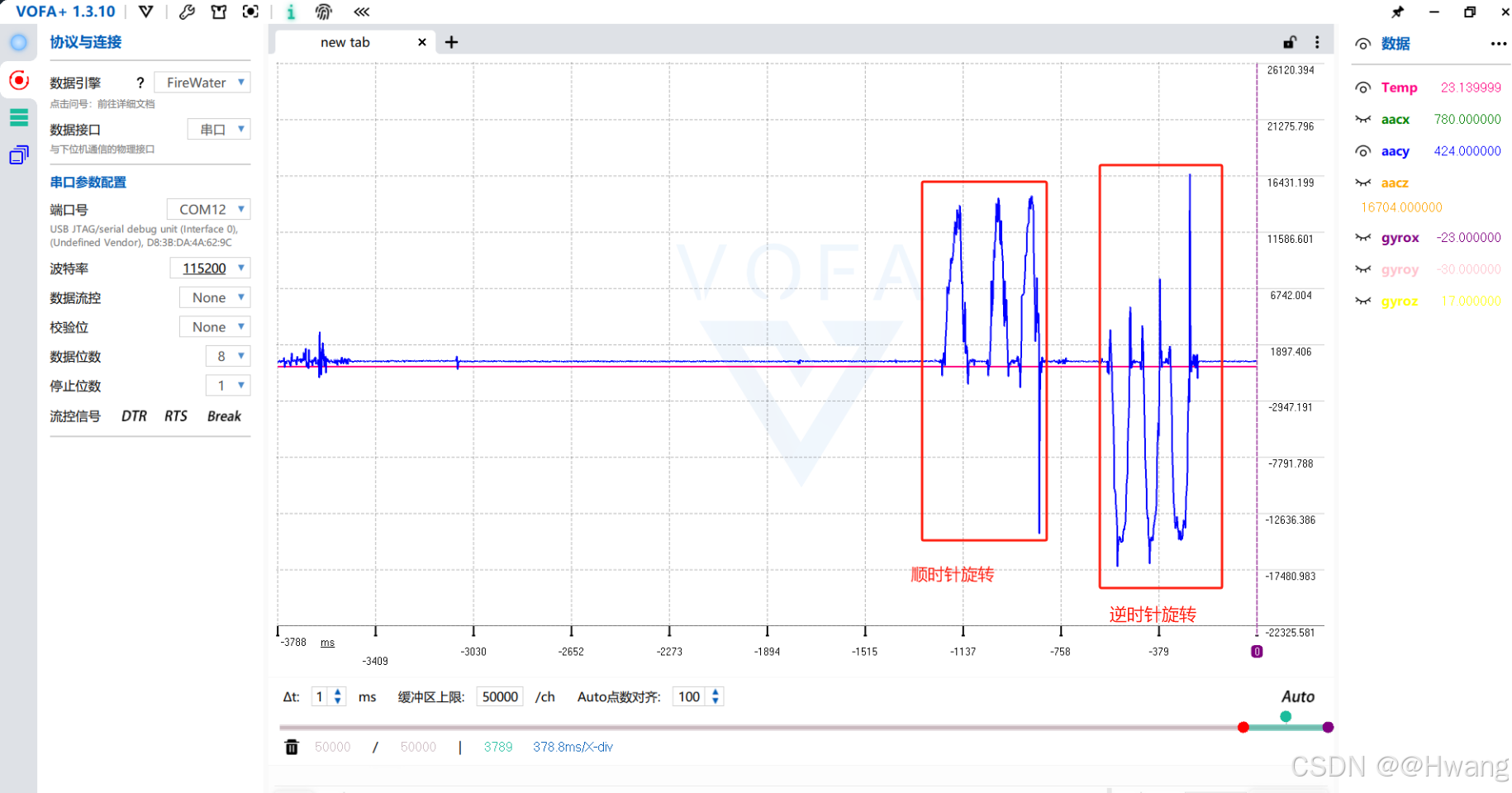
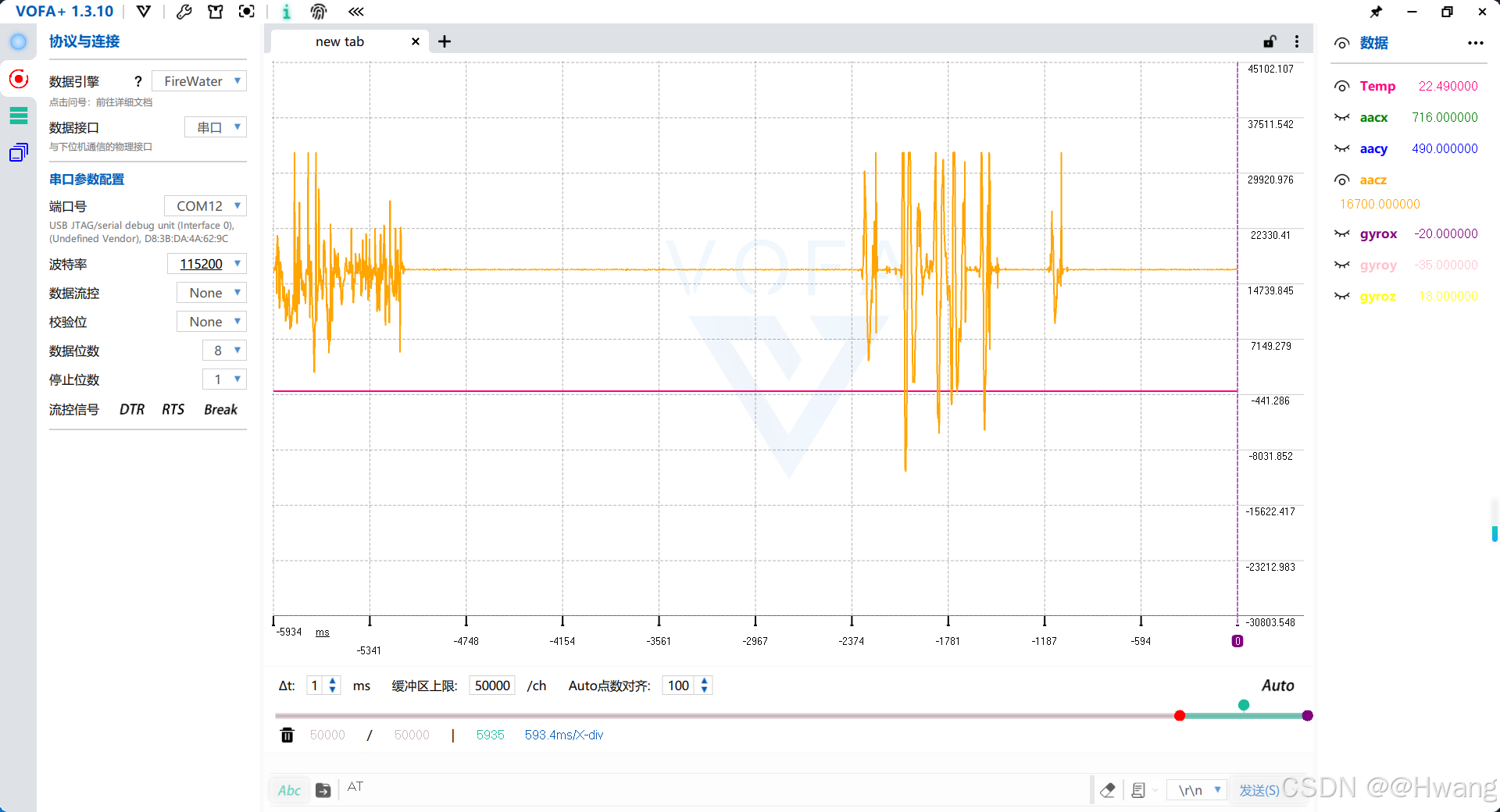
效果图
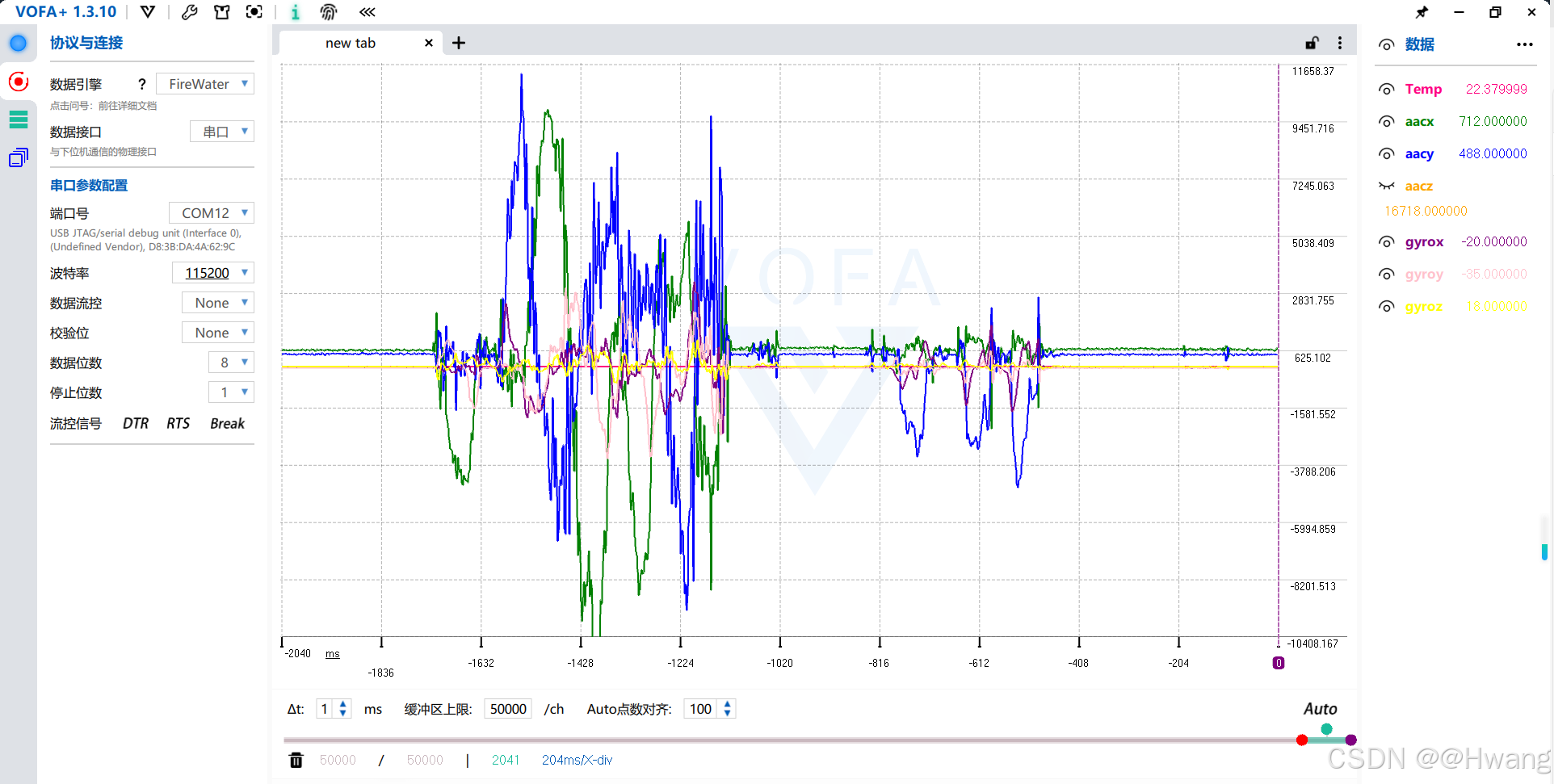
旋转x轴时,加速度aacx的变化
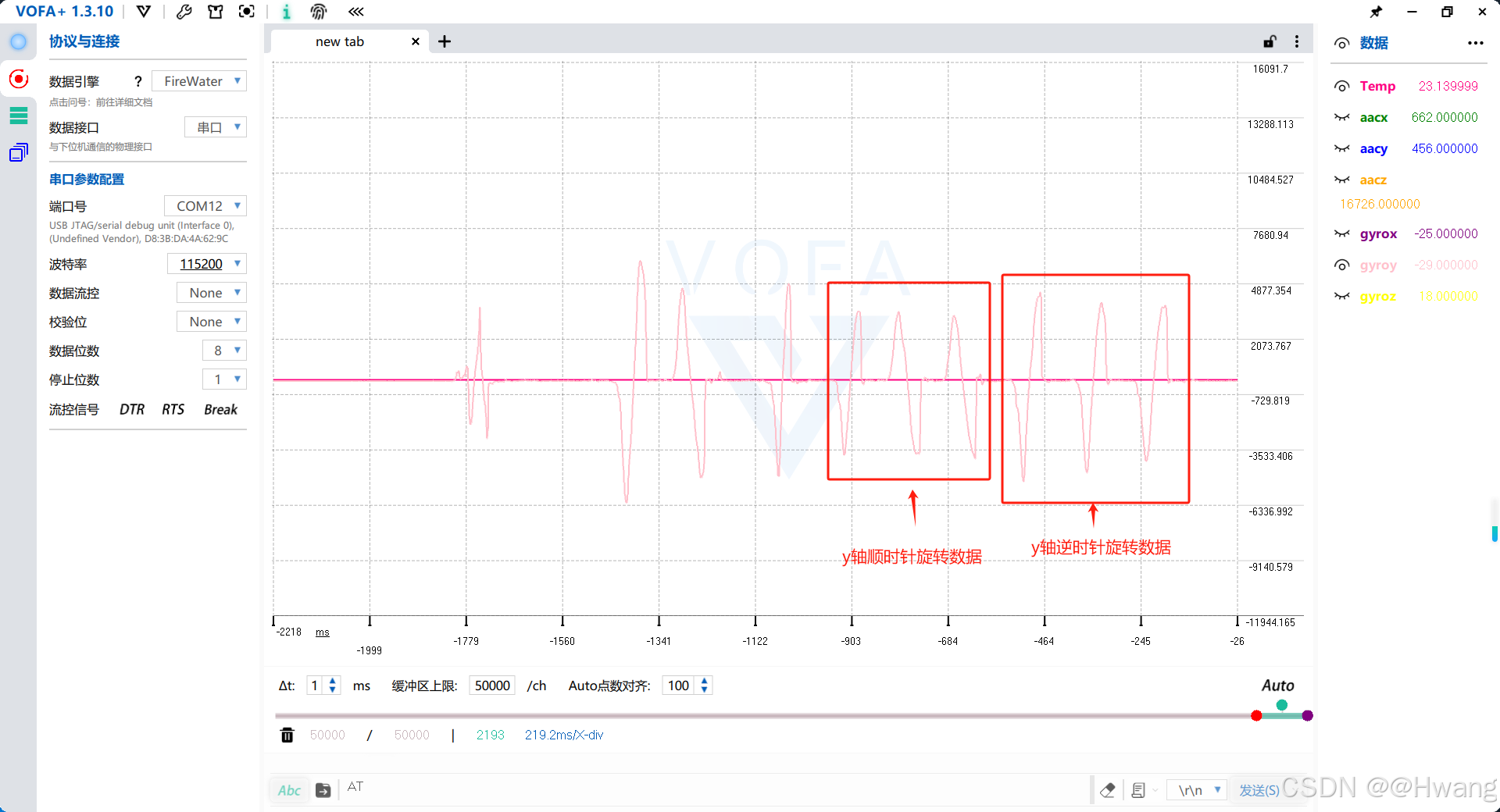
 旋转y轴时,加速度aacy的变化
旋转y轴时,加速度aacy的变化
上下移动时,z轴加速度aacz变化
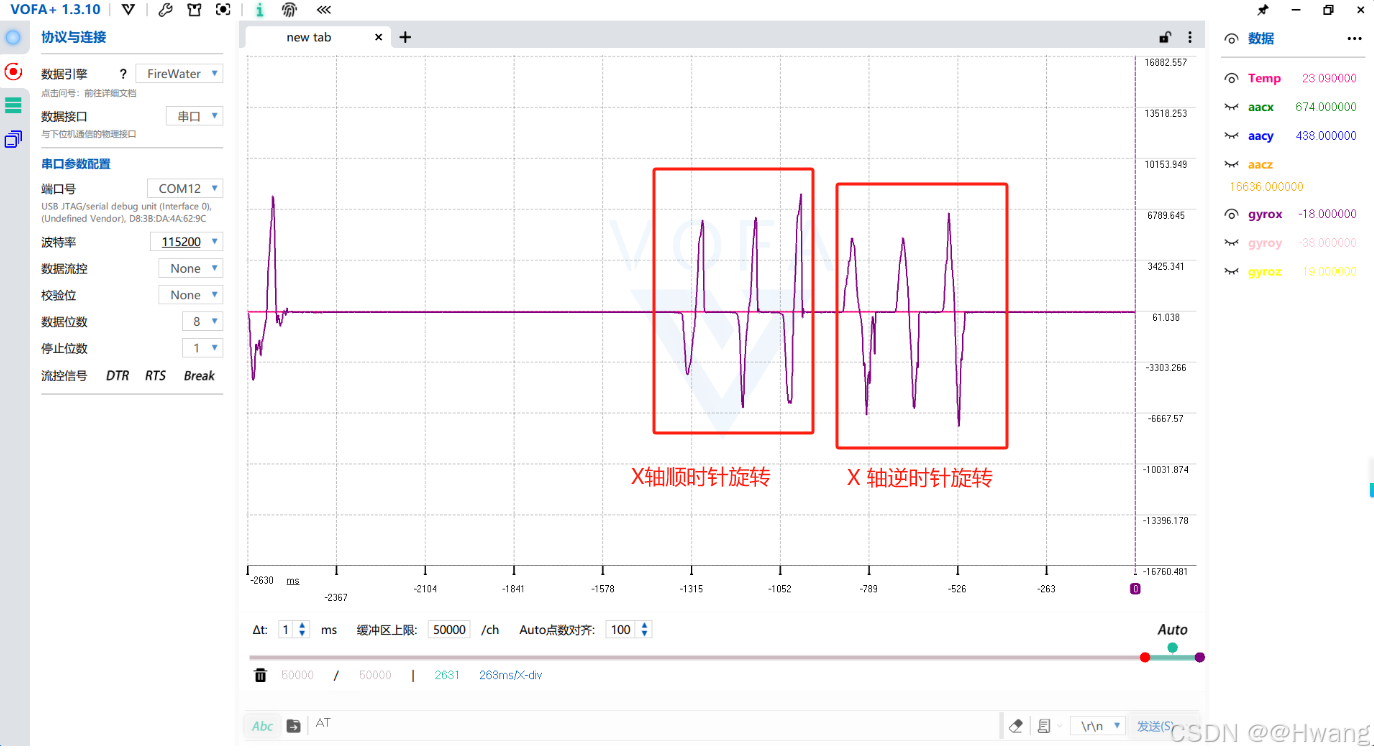
以x轴旋转,gyrox的变化
沿y轴旋转,gyroy的变化
沿z轴旋转,gyroz的变化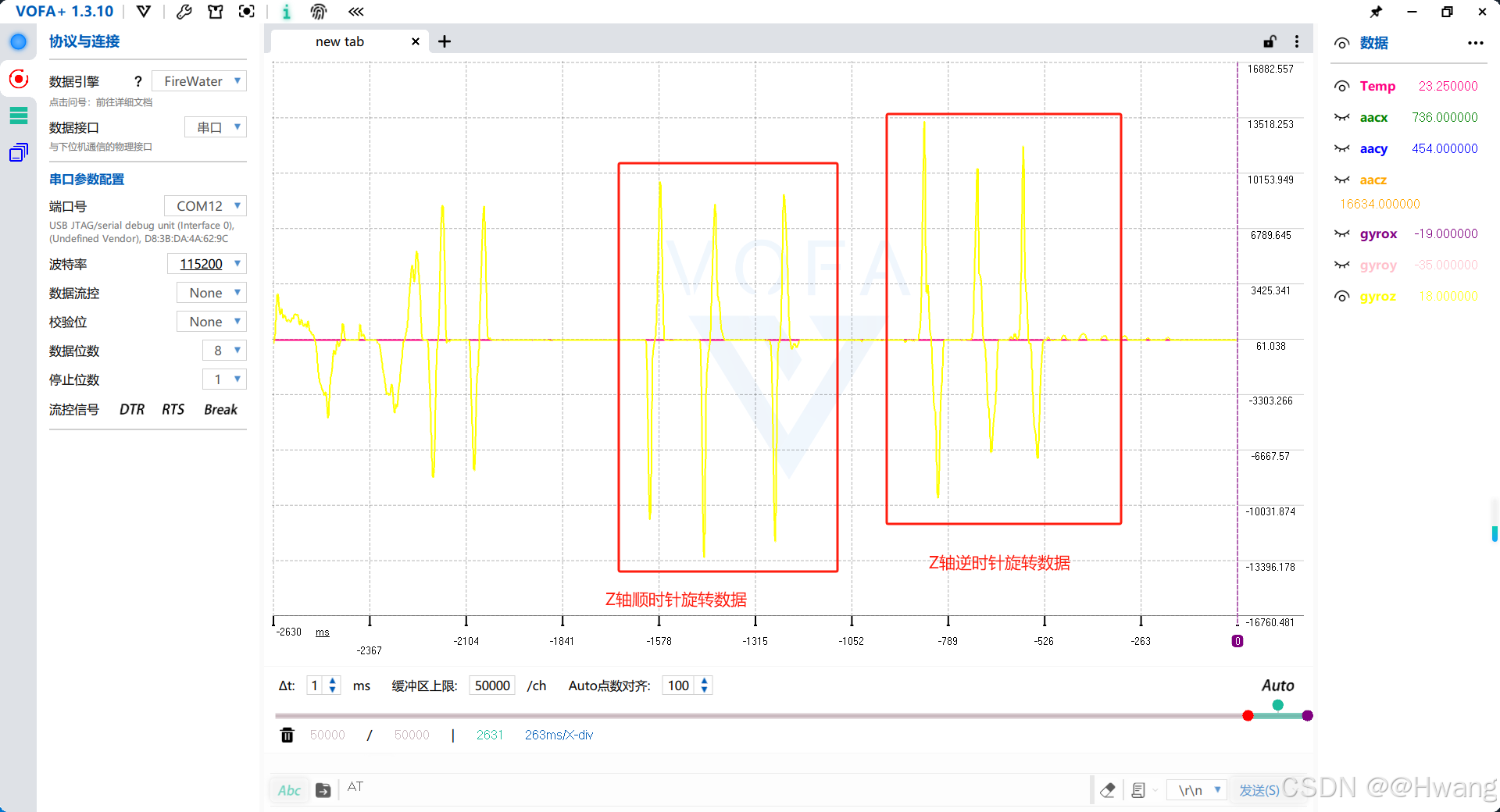


















 2894
2894

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











