









 本文介绍了使用灰度重心法从图像中逐行提取线激光条纹中心线的原理,通过计算灰度重心来确定每行的中心点,并最终拟合形成条纹中心线。这种方法运算快速,但可能因噪点干扰导致精度问题。
本文介绍了使用灰度重心法从图像中逐行提取线激光条纹中心线的原理,通过计算灰度重心来确定每行的中心点,并最终拟合形成条纹中心线。这种方法运算快速,但可能因噪点干扰导致精度问题。
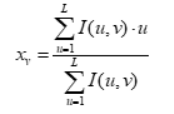
灰度重心法是根据每行光条纹横截面内的灰度分布特征逐行进行处理,通过在行坐标的方向上,逐行计算提取光条纹区域的灰度重心点,并将该点用来代表该截面的光条纹中心点位置,最后将所有中心点拟合形成光条纹中心线。灰度重心法计算光条纹中心点的公式(光条纹第v列的灰度重心坐标):
图像包含U行、V列的图像中坐标(u, v)处的像素灰度值为I(u,v),其中u=1,2,3,…,U; v=1,2,3…,V。
灰度重心法提取光条纹中心线时运算速度快,实时性好。但是易受图像中的噪点干扰,导致中心线坐标偏移。
#include <opencv2/opencv.hpp>
#include <io
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 2809
2809

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











