



 本文介绍了在VS2013环境下,使用Qt5.8.0和Libmodbus库进行C++编程,展示了如何搭建框架、连接PLC、读写寄存器以及断开连接的测试例程。
本文介绍了在VS2013环境下,使用Qt5.8.0和Libmodbus库进行C++编程,展示了如何搭建框架、连接PLC、读写寄存器以及断开连接的测试例程。
一、环境说明
开发环境:vs2013、qt5.8.0、Libmodbus库
开发语言:C++
二、框架搭建
项目属性内分别引入modbus.dll、modbus.h、modbus-tcp.h、modbus.lib等头文件、动态库、静态库。具体操作与引入位置参考第一篇博客。
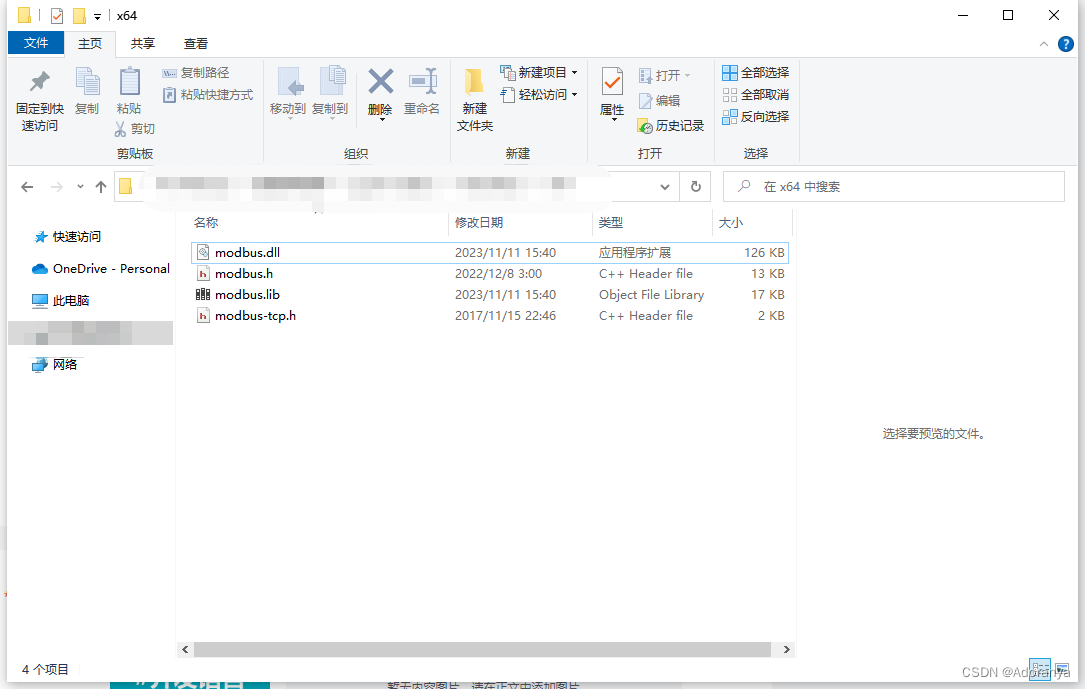
注意64位与32位系统、debug模式与release模式下分别对应不同的引入文件。
三、测试例程
程序中引入头文件 #include "modbus.h"
1.建立PLC连接
void pcPLC::connect()
{
std::cout << "modbus init success" << std::endl;
// 设置PLC的IP地址与端口,建立TCP连接
ctx = modbus_new_tcp("192.168.1.1", 502);
if (ctx == NULL)
{
std::cout << "Unable to allocate libmodbus context " << modbus_strerror(errno) << std::endl;
}
std::cout << "modbus_connect(ctx) = " << modbus_connect(ctx) << std::endl;
if (modbus_connect(ctx) == -1)
{
modbus_close(ctx);
modbus_free(ctx);
std::cout << "PLC connect failed " << modbus_strerror(errno) << std::endl;
}
else
{
std::cout << "PLC connect success " << std::endl;
plcFlag = 1;
}
}
2.读取寄存器数据
int pcPLC::readRegister(int num)
{
uint16_t regs[1];
if (plcFlag != 0)
{
int res = modbus_read_registers(ctx, num, 1, regs);
if (res == -1)
{
std::cerr << "Failed to read registers: " << modbus_strerror(errno) << std::endl;
// 读取失败返回值0x0000
regs[0] = 0x0000;
}
else
{
//std::cout << "Read Register " << num << " : " << regs[0] << std::endl;
}
}
// 返回读取值
return regs[0];
}
3.数据写入寄存器
void pcPLC::writeRegister( int num, int value)
{
if (plcFlag != 0)
{
if (modbus_write_register(ctx, num, value) == -1)
{
std::cerr << "Failed to write to register: " << modbus_strerror(errno) << std::endl;
}
else
{
//std::cout << "Changed Register " << num << " to : " << value << std::endl;
}
}
}
4.断开PLC连接
void pcPLC::disconnect()
{
if (plcFlag != 0)
{
modbus_close(ctx);
modbus_free(ctx);
plcFlag = 0;
std::cout << "PLC disconnect success " << std::endl;
}
}

















 3095
3095

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









