




ChatTTS 属于一种依托深度学习的文本转语音技术,能够把文本内容转换成自然且流畅,宛如真人发声的语音。ChatTTS 可以更出色地领会,理解文本所蕴含的情感、语调和语义,进而在语音输出时展现出更为精准和鲜活的各种情感。借助对大规模语音数据的训练以及运用高级的神经网络模型,ChatTTS 实现了对文本情感理解与表达,让语音输出效果更接近人类的表达方式。
ChatTTS 的应用范畴颇为广泛,特别是在语音助手、虚拟主播、有声书等领域具备极大的潜力。举例来说,在语音助手这一方面,ChatTTS 能够给予语音助手更生动、自然的声音,增强用户的体验感。
下载ChatTTS模型
系统环境:Windows10
Github地址:https://github.com/2noise/ChatTTS
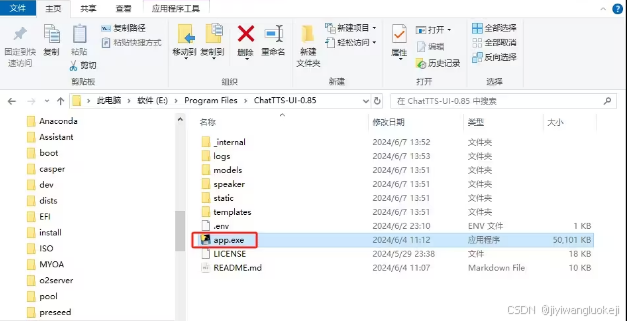
下载到本地后解压,解压后双击 app.exe 即可使用。
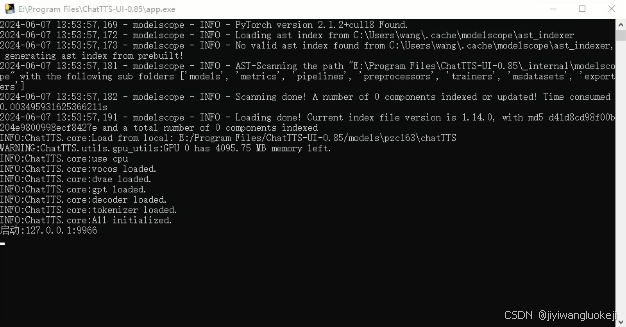
双击运行后会出现如下图,里面有个启动地址,输入到浏览器打开主页。
进入到ChatTTS界面,如下图。
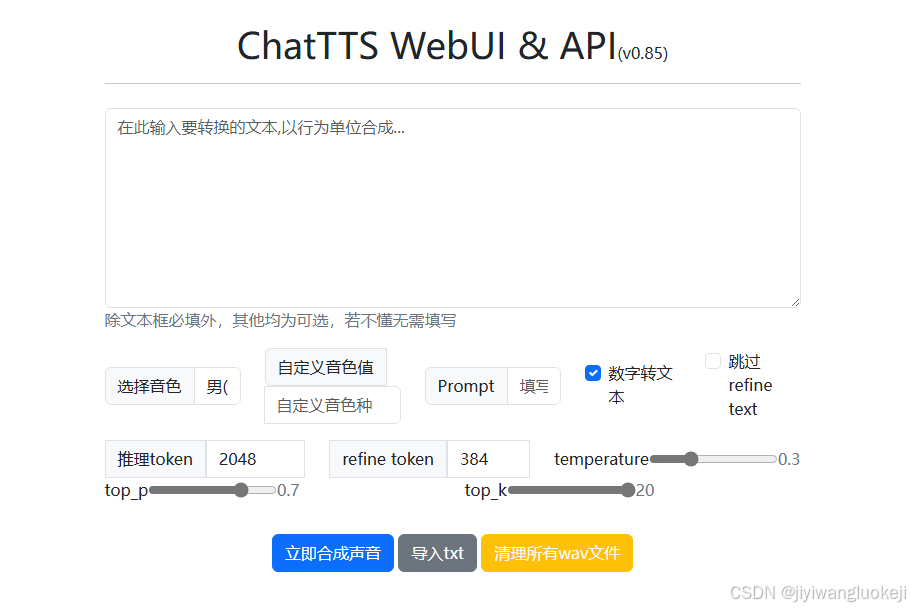
可以修改参数,后点击立即合成声音即可,等待一会,生成完毕声音会显示在下面,点击就可以播放了。


















 859
859

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











