









 本文全面介绍了ROS(机器人操作系统)的历史背景、发展历程、特点及其在机器人研发中的应用。详细讲解了ROS的安装步骤,包括版本选择、环境配置、安装过程及测试方法,为初学者提供了完整的ROS入门指导。
本文全面介绍了ROS(机器人操作系统)的历史背景、发展历程、特点及其在机器人研发中的应用。详细讲解了ROS的安装步骤,包括版本选择、环境配置、安装过程及测试方法,为初学者提供了完整的ROS入门指导。
第一章 ROS简介
本章简介
机器人操作系统(Robot Operating System, ROS)是一个应用于机器人上的操作系统,它操作方便、功能强大,特别适用于机器人这种多节点多任务的复杂场景。 因此自ROS诞生以来,受到了学术界和工业界的欢迎,如今已经广泛应用于机械臂、移动底盘、无人机、无人车等许多种类的机器人上。
本章介绍ROS的产生、发展、特点和安装方法,带给你一个简单直观的ROS介绍。
1.1 机器人时代的到来
机器人时代与ROS诞生
他们速度很快,具有非凡智慧与致命力量;他们不受生命周期桎梏,是未来科技的希望。机器人和仿生机器,正要从实验室的襁褓中迸裂而出,投入市场的广阔天地,运算能力的大幅进步加上最新的机器人脑部设计,为机器人科技带来前所未有的改革,毋庸置疑,机器人即将改变人类工作场所及生活状态。神爱世人,人亦钟情所造之物,如今有幸跟随时代步伐,一起创造世界,借不灭之躯,走遍险远之地,看尽世之奇伟瑰怪。
曾经,机器人创新的门槛非常高。如果你想在任何应用领域开发出有分量的产品,你需要建立一整套能够实现你想法的系统:包括硬件设备,当然还有控制系统,界面接口,以及让机器人运行并作为测试平台的检测工具。“没有什么是现成的设备,除了一些很差,闭源的东西外。”

随着机器人领域的快速发展和复杂化,代码复用和模块化的需求日益强烈,已有的开源系统已不能很好地适应需求,2010年Willow Garage公司发布了开源机器人操作系统ROS。
1.2 ROS发展历程
1.2.1 ROS起源与发展
本世纪开始,关于人工智能的研究进入了大发展阶段,包括全方位的具体的AI,例如斯坦福大学人工智能实验室STAIR(Stanford Artificial Intelligence Robot)项目,该项目组创建了灵活的、动态的软件系统的原型,用于机器人技术。在2007年,机器人公司Willow Garage和该项目组合作,他们十分具有前瞻性的,提供了大量资源进一步扩展了这些概念,经过具体的研究测试实现之后,无数的研究人员将他们的专业性研究贡献到ROS核心概念和其基础软件包,这期间积累了众多的科学研究成果。ROS软件的开发自始至终采用开放的BSD协议,在机器人技术研究领域逐渐成为一个被广泛使用的平台。
Willow Garage公司和斯坦福大学人工智能实验室合作以后,在2009年初推出了ROS0.4,这是一个测试版的ROS,现在所用的系统框架在这个版本中已经具有了初步的雏形。之后的版本才正式开启了ROS的发展成熟之路。
1.2.2 历代ROS版本
ROS1.0版本发布于2010年,基于PR2机器人开发了一系列机器人相关的基础软件包。随后ROS版本迭代频繁,目前已经发布到了Lunar。 目前使用人数最多的是Kinetic和Indigo这两个Long Term Support版本。
| ROS版本 | 发布时间 |
|---|---|
| Lunar Loggerhead | 2017.5 |
| Kinetic Kame | 2016.5 |
| Jade Turtle | 2015.5 |
| Indigo lgloo | 2014.7 |
| Hydro Medusa | 2013.9 |
| Groovy Galapagos | 2012.12 |
| Fuerte Turtle | 2012.4 |
| Electric Emys | 2011.8 |
| Diamondback | 2011.3 |
| C Turtle | 2010.8 |
| Box TurtleBox Turtle | 2010.3 |

1.2.3 展望
ROS的发展逐渐的趋于成熟,近年来也逐步是面对着Ubuntu的更新而更新,这说明ROS已经初步进入一种稳定的发展状态,每年进行一次更新的频率同时还保留着长期支持的版本,这使得ROS在稳步的前进发展同时,也有着开拓创新的方向。目前越来越多的机器人、无人机甚至无人车都开始采用ROS作为开发平台,尽管ROS在实用方面目前还存在一些限制,但前途非常光明。
2018年ROS2 1.0版将发布,未来ROS2将如何影响机器人领域,我们拭目以待。相信在人工智能的大发展、人机交互越来越密切、互联网+的大时代,ROS会发挥出越来越重要的作用。
1.3 什么是ROS
1.3.1 什么是ROS
机器人是一个系统工程,它涉及机械、电子、控制、通信、软件等诸多学科。以前,开发一个机器人需要花很大的功夫,你需要设计机械、画电路板、写驱动程序、设计通信架构、组装集成、调试、以及编写各种感知决策和控制算法,每一个任务都需要花费大量的时间。因此像电影《钢铁写》中那样,仅靠一个人的力量造出一个动力超强的人形机器人机甲是不可能的。
 然而随着技术进步,机器人产业分工开始走向细致化、多层次化,如今的电机、底盘、激光雷达、摄像头、机械臂等等元器件都有不同厂家专门生产。社会分工加速了机器人行业的发展。而各个部件的集成就需要一个统一的软件平台,在机器人领域,这个平台就是机器人操作系统ROS。
然而随着技术进步,机器人产业分工开始走向细致化、多层次化,如今的电机、底盘、激光雷达、摄像头、机械臂等等元器件都有不同厂家专门生产。社会分工加速了机器人行业的发展。而各个部件的集成就需要一个统一的软件平台,在机器人领域,这个平台就是机器人操作系统ROS。
ROS是一个适用于机器人编程的框架,这个框架把原本松散的零部件耦合在了一起,为他们提供了通信架构。ROS虽然叫做操作系统,但并非Windows、Mac那样通常意义的操作系统,它只是连接了操作系统和你开发的ROS应用程序,所以它也算是一个中间件,基于ROS的应用程序之间建立起了沟通的桥梁,所以也是运行在Linux上的运行时环境,在这个环境上,机器人的感知、决策、控制算法可以更好的组织和运行。
以上几个关键词(框架、中间件、操作系统、运行时环境)都可以用来描述ROS的特性,作为初学者我们不必深究这些概念,随着你越来越多的使用ROS,就能够体会到它的作用。
1.3.2 ROS特点
ROS具有这些特点:
-
分布式 点对点
ROS采用了分布式的框架,通过点对点的设计让机器人的进程可以分别运行,便于模块化的修改和定制,提高了系统的容错能力。
-
多种语言支持
ROS支持多种编程语言。C++、Pyhton和已经在ROS中实现编译,是目前应用最广的ROS开发语言,Lisp、C#、Java等语言的测试库也已经实现。为了支持多语言编程,ROS采用了一种语言中立的接口定义语言来实现各模块之间消息传送。通俗的理解就是,ROS的通信格式和用哪种编程语言来写无关,它使用的是自身定义的一套通信接口。
-
开源社区
ROS具有一个庞大的社区ROS WIKI(http://wiki.ros.org/ ),这个网站将会始终伴随着你ROS开发,无论是查阅功能包的参数、搜索问题还是。当前使用ROS开发的软件包已经达到数千万个,相关的机器人已经多达上千款。此外,ROS遵从BSD协议,对个人和商业应用及修改完全免费。这也促进了ROS的流行。
1.3.3 ROS优缺点
ROS为我们开发机器人带来了许多方便,然而它也确实存在一些问题:
| 优点 | 缺点 |
|---|---|
| 提供框架、工具和功能 | 通信实时性能有限 |
| 方便移植 | 系统稳定性尚不满足工业级要求 |
| 庞大的用户群体 | 安全性上没有防护措施 |
| 免费开源 | 仅支持Linux(Ubuntu) |
总体来说,ROS更适合科研和开源用户使用,如果在工业场景应用(例如无人驾驶)还需要做优化和定制。 为了解决实际应用的问题,ROS2.0做了很大的改进,目前正在开发之中,未来表现如何值得期待。
1.4 安装ROS的步骤
1.4.1 ROS版本选择
ROS目前只支持在Linux系统上安装部署,它的首选开发平台是Ubuntu。时至今日ROS已经相继更新推出了多种版本,供不同版本的Ubuntu开发者使用。为了提供最稳定的开发环境,ROS的每个版本都有一个推荐运行的Ubuntu版本。如下表所示:
| ROS 版本 | 首选Ubuntu版本 |
|---|---|
| Lunar | Ubuntu 17.04 |
| Kinetic(建议选用) | Ubuntu 16.04 |
| Jade | Ubuntu 15.04 |
| Indigo | Ubuntu 14.04 |
| ... | ... |
本教程使用的平台是Ubuntu 16.04,ROS版本是Kinetic。
如果你还没有安装Ubuntu,建议选择16.04版本(https://www.ubuntu.com/download/desktop )。并且我们建议在本地安装,不推荐用虚拟机,这样兼容性更好。
如果你已经安装Ubuntu,请确定系统版本,在终端中输入cat /etc/issue确定Ubuntu版本号,然后选择对应的ROS版本。如果没有安装正确的ROS版本,就会出现各种各样的依赖错误,所以安装时请谨慎。
更多信息请参考ROS官方网站进行下载和安装。
1.4.2 安装ROS
在正式的安装前,先检查下Ubuntu初始环境是否配置正确。
打开Ubuntu的设置->软件与更新->Ubuntu软件->勾选关键字universe,restricted,multiverse三项。 如图所示:

配置完成后,就可以开始安装ROS了,打开终端。
① 添加sources.list
$ sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
这一步配置将镜像添加到Ubuntu系统源列表中,建议使用国内或镜像源,这样能够保证下载速度。本例使用的是中国科技大学的源。
② 添加keys
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
公钥是Ubuntu系统的一种安全机制,也是ROS安装中不可缺的一部分。
③ 系统更新
$ sudo apt-get update && sudo apt-get upgrade
更新系统,确保自己的Debian软件包和索引是最新的。
④ 安装ROS
ROS中有很多函数库和工具,官网提供了四种默认的安装方式,当然也可以单独安装某个特定的软件包。这四种方式包括桌面完整版安装、桌面版安装,基础版安装、单独软件包安装。推荐安装桌面完整版安装(包含ROS、rqt、rviz、通用机器人函数库、2D/3D仿真器、导航以及2D/3D感知功能),如下:
-
Ubuntu 16.04安装Kinetic版本
$ sudo apt-get install ros-kinetic-desktop-full # Ubuntu 16.04 -
Ubuntu 14.04安装Lndigo版本
$ sudo apt-get install ros-indigo-desktop-full # Ubuntu 14.04
如果你不想安装桌面完整版,你还可以尝试以下三种方式安装:
-
桌面版安装(包含ROS、rqt、rviz以及通用机器人函数库)
sudo apt-get install ros-kinetic-desktop -
基础版安装(包含ROS核心软件包、构建工具以及通信相关的程序库,无GUI工具)
sudo apt-get install ros-kinetic-ros-base -
单独软件包安装(这种安装方式在运行ROS缺少某些package依赖时会经常用到。你可以安装某个指定的ROS软件包,使用软件包名称替换掉下面的PACKAGE)
sudo apt-get install ros-kinetic-PACKAGE例如系统提示找不到slam-gmapping,你就可以:
sudo apt-get install ros-kinetic-slam-gmapping要查找可用的软件包,请运行:
apt-cache search ros-kinetic
软件包的依赖问题还可能出现在重复安装ROS、错误安装软件包的过程中,出现有一些软件包无法安装,例如:
下列软件包有未满足的依赖关系:ros-kinetic-desktop-full :
依赖: ros-kinetic-desktop 但是它将不会被安装;
依赖: ros-kinetic-perception 但是它将不会被安装;
依赖: ros-kinetic-simulators 但是它将不会被安装;
E: 无法修正错误,因为您要求某些软件包保持现状,就是它们破坏了软件包间的依赖关系。
出现上述问题,有可能是自己的版本不合适不兼容造成,也可能是镜像源没有更新,具体的设置参考软件和更新的截图。当然也有可能是其他原因,比如更新了忘记刷新环境source一下,重开一个终端等等。具体的问题原因可以去搜索引擎上尝试求助解决,或者登陆ROS Wiki(ROS的百科全书)去查询解决自己的具体问题。
1.4.3 配置ROS
配置ROS是安装完ROS之后必须的工作。
① 初始化rosdep
$ sudo rosdep init && rosdep update
这一步初始化rosdep,是使用ROS之前的必要一步。rosdep可以方便在你需要编译某些源码的时候为其安装一些系统依赖,同时也是某些ROS核心功能组件所必需用到的工具。
② ROS环境配置
#For Ubuntu 16.04
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
#For Ubuntu 14.04
$ echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
注意: ROS的环境配置,使得你每次打开一个新的终端,ROS的环境变量都能够自动配置好,也就是添加到bash会话中,因为命令source /opt/ros/kinetic/setup.bash 只在当前终端有作用,即具有单一时效性,要想每次新开一个终端都不用重新配置环境,就用echo语句将命令添加到bash会话中。
③ 安装rosinstall
rosinstall 是ROS中一个独立分开的常用命令行工具,它可以方便让你通过一条命令就可以给某个ROS软件包下载很多源码树。在ubuntu上安装这个工具,请运行:
$ sudo apt-get install python-rosinstall
至此,ROS的安装就结束了,下面测试ROS能否正常运行。
1.4.4 测试ROS
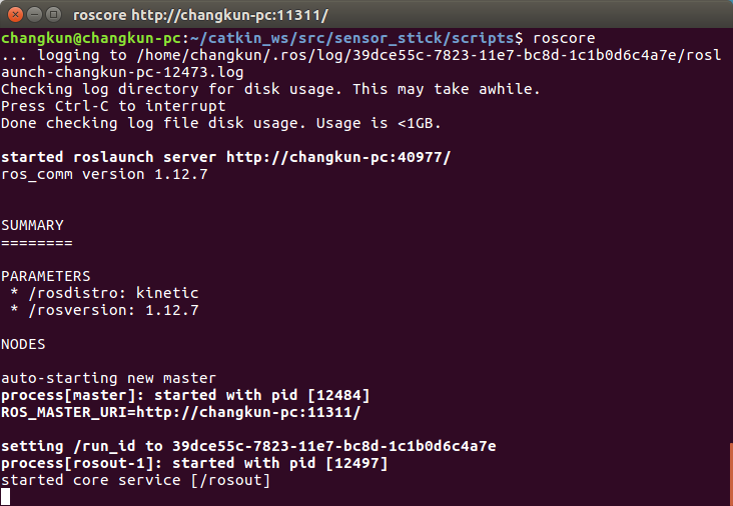
首先启动ROS,输入代码运行roscore:
$ roscore
如果出现下图所示,那么说明ROS正常启动了!
接着我们测试ROS的吉祥物--小海龟,来简单的测试ROS运行是否正常,同时也来体验一下ROS的神奇与精彩!
启动roscore后,重新打开一个终端窗口,输入:
$ rosrun turtlesim turtlesim_node
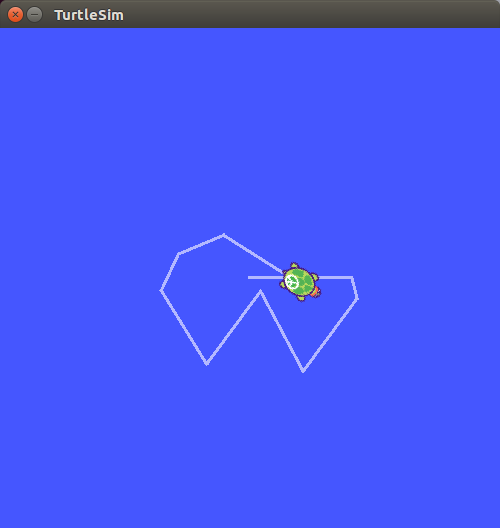
你还看到一只萌萌的海龟出现在屏幕上,那么该怎么样来操纵这只小海龟呢?重新打开新的一个终端,输入:
$ rosrun turtlesim turtle_teleop_key
将鼠标聚焦在第三个终端窗口上,然后通过键盘上的方向键,进行操作小海龟,如果小海龟正常移动,并且在屏幕上留下自己的移动轨迹,如下图。恭喜你,ROS已经成功的安装、配置并且运行!
至此,ROS的安装、配置与测试就全部结束了,下面就正式开启ROS精彩的旅程!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









