







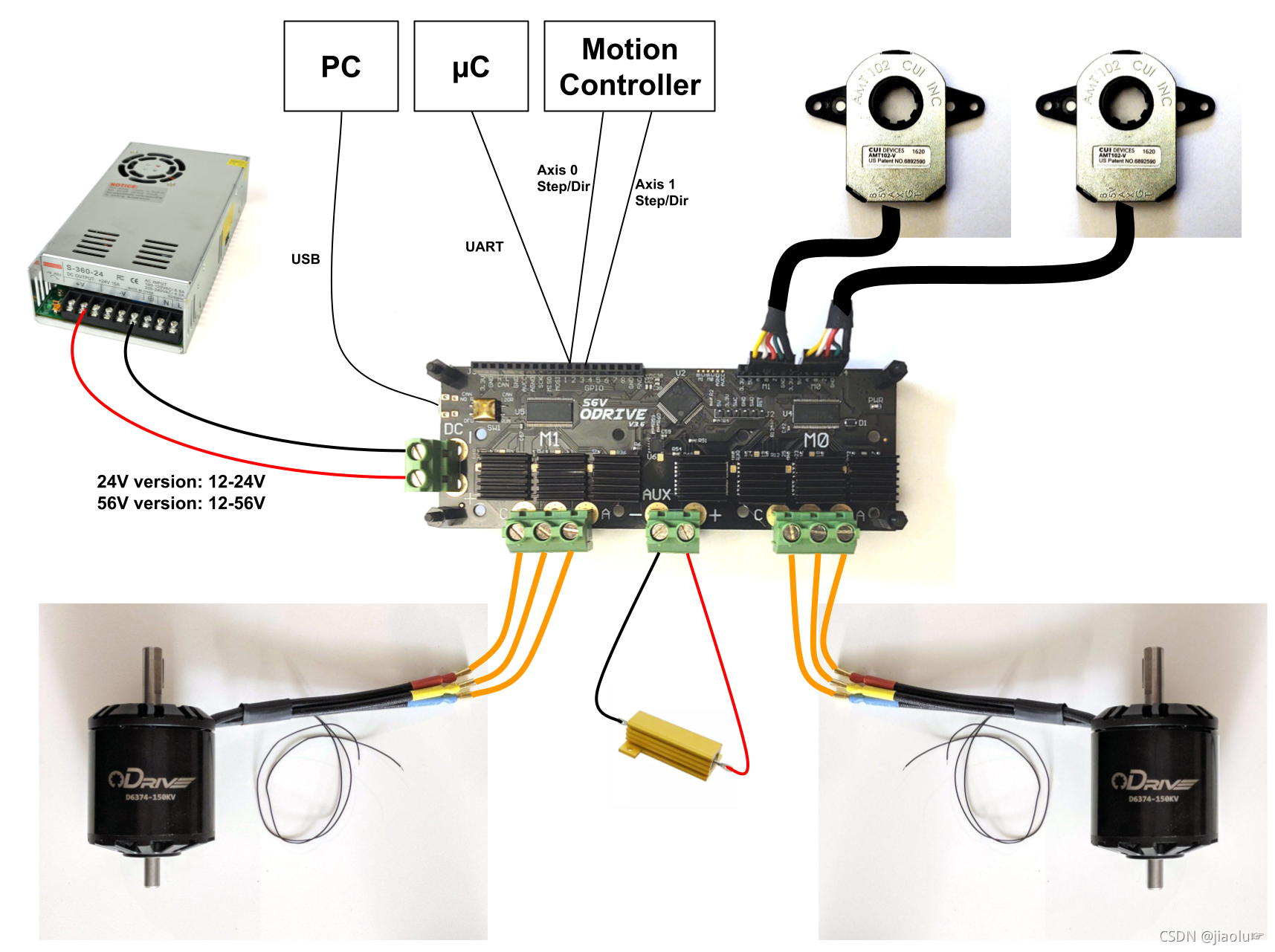
ODrive
相关链接:https://odriverobotics.com/
https://hackaday.io/project/11583-odrive-high-performance-motor-control/log/40702-boards-and-development
Currently the firmware supports the following:
- Position, Velocity, and Current control modes.
- Automatic identification of motor parameters (Inductance, Resistance)
- Realtime USB communication (>4000 floats/sec) to Python host program, which you can interface to your own application.
- Live-plotting of many variables, including position, speed, current, control effort: extensible to expose your own variables.
- UART communication with an easy to use Arduino Library.
- Step/Direction input, for replacing stepper motor drivers.
- Trajectory generation and tracking.
- Absolute encoders.
- Commands over CAN.
- Hall effect sensored motors (instead of encoder).
- PWM input.
- Encoders with Index pulse.
- USB Bootloader.
VESC
http://vedder.se/2015/01/vesc-open-source-esc/
https://vesc-project.com/
https://blog.youkuaiyun.com/fei_yang_yf/category_9166616.html
Arduino-FOC
http://simplefoc.com/
https://github.com/byDagor/Dagor-Brushless-Controller
其他
https://gitee.com/wojialaomuzhu/foc-tutorial.git
https://github.com/ToanTech/Deng-s-foc-controller
https://github.com/byDagor/Dagor-Brushless-Controller


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









