




使用距离传感器数据预测驾驶路线
Werner Uhler, Michael Scherl and Bernd Lichtenberg
Robert Bosch GmbH
ABSTRACT
将距离传感器检测到的车辆分配到相对于本车的车道是未来驾驶辅助系统(如自适应巡航控制 (ACC))的一项重要且必要的任务。通过车辆前方物体的集体运动可以预测车辆自身的行驶路线。该方法不仅使用主车的数据来确定其自身的轨迹,还使用距离传感器的数据(提供车辆前方物体的距离和角度)来确定这些物体的轨迹。算法是使用离线模拟开发的,该模拟由从真实 ACC 车辆获得的记录数据提供。结果显示,与仅基于主车数据的其他方法相比,预测的行驶路线质量显著提高。特别是在曲率变化的情况下,例如弯道的起点,该算法有助于提高 ACC 的整体系统性能。
INTRODUCTION
当前和未来的驾驶员辅助系统(例如 ACC 或碰撞警告/避免系统)在评估当前交通状况方面面临共同的挑战。它们使用某种距离传感器检测车辆周围的车辆和其他物体。该传感器提供有关检测到的物体相对于车辆的位置的信息。然而,了解它们相对于车道的位置意味着更多地了解这些车道在汽车前方的走向。这个问题在 /1/ 中进行了描述。
有几种方法可以获得缺少的信息。一大类方法确定了汽车轨迹的实际曲率。当今的系统大多使用标准的车载传感器,例如车轮速度传感器,它根据车轮速度的差异和平均值生成曲率。或者,偏航率传感器和车速可以提供相同的信息。转向角传感器可用于辅助这两种方法。基本假设是两个。首先,假设汽车的轨迹与其车道密切相关。其次,假设车道的实际曲率是恒定的。违反第一个假设的后果很小,因为在许多情况下,预测车辆的轨迹比预测车道更重要,例如在变道时。然而,对于第二个假设来说,这并不正确。在曲线的开始或结束处,预测汽车的轨迹和车道都会出现严重错误。显然,这些系统误差不能仅通过局部确定曲率来克服。
第二类方法是使用传感器来观察汽车前方。通常使用视频传感器检测车道边界,例如参见 /2/。这样可以测量车道的曲率,而不必进行预测。提供有关汽车在车道中的位置、车道宽度、车道边界类型等的附加信息。然而,由于摄像机光学系统和摄像机分辨率迫使系统预测更大距离的值,因此测量距离被限制在 50-80 米左右。此外,视频传感器的性能很容易受到天气条件和白天(例如黄昏或黎明)的影响。同样众所周知的是检测道路边界的雷达传感器,例如参见 /3/ 和 /4/。使用这种方法进行车道预测需要传感器具有良好的横向分辨率,这使得它们更加昂贵。此外,知道道路边界附近站立物体的位置并不意味着知道车道的走向,因为缺乏有关它们的数量和宽度的信息。这些真正具有预测性的系统的一个共同特点似乎是相当多的额外成本。
第三,可以使用导航系统来预测车道。很容易估计,确定本车位置的精度必须在典型车道宽度范围内,以便将其他车辆分配到正确的车道。如今,标准导航系统即使基于 GPS,最差情况下的精度也约为 50 米。使用差分 GPS 确实意味着相当大的改进。尽管如此,这些系统在城市地区和使用最新地图时仍存在困难。然而,使用导航数据来增强车道预测并提供有关交叉路口等的信息似乎很有希望。
支持车道预测的一个非常有前途的方法是整合有关其他车辆轨迹的信息。/5/ 中给出了一个例子。当然,这些轨迹通常与车道的走向不同,就像自己的车的轨迹一样。但在这里我们有机会使用许多轨迹来进行统计评估。通过这种方法,可以将变道或离开道路的汽车与其他数据区分开来。在本文中,我们描述了一种从记录的其他车辆位置数据中获取预测车道信息的方法。
DESCRIPTION OF THE ALGORITHM
基础知识 — 此处介绍的方法的基本思想是测量本车前方沿同一方向行驶的其他车辆的位置。这些车辆的每辆车的位置都单独记录。在每个时间步骤中,这些位置都会转换为实际车辆坐标系。因此,对于每个物体,我们在任何时候都有多个位置,代表其相对于主车当前位置和坐标系的轨迹。
让我们对其他车辆相对于主车辆的横向偏移做出一些基本定义。这些定义如图 1 所示。
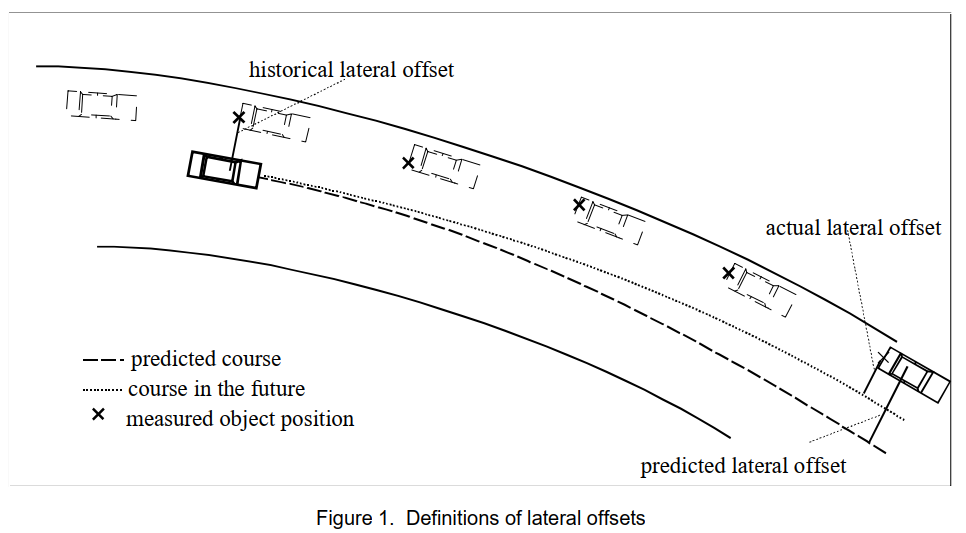
1.实际横向偏移是到达主车所在位置时,对方车辆当前位置与主车所在位置之间的横向距离。此值无法在当前测量,因为您必须知道主车未来的准确轨迹。
2.历史横向偏移定义为主车当前位置处 主车与其他车辆记录位置之间的横向距离。
历史横向偏移,说的应该是其他车辆记录的历史位置在自车所在的s处的 l 值吧,也就是拿自车的当前位置和其他车辆的历史位置对比
3.预测横向偏移量是指在其他车辆的距离处,其他车辆的当前位置与主车辆的预测位置之间的横向距离。
由于无法测量实际横向偏移,因此可以用预测横向偏移来近似,然后使用预测横向偏移来确定其他车辆与主车运动的相关性。预测横向偏移大于车道宽度一半的车辆被认为与主车运动无关1。然而,这需要对主车的轨迹进行精确预测。如上所述,局部预测在曲线的开始和结束处会受到系统误差的影响。
另一方面,也可以使用历史横向偏移。可以使用其他车辆的记录数据轻松确定。基本假设是,其值的显著变化(即变化约半个车道宽度或更多)很少发生。很明显,其他车辆的车道变换会导致系统误差,而该方法不受车道曲率变化的影响。
基本假设是车辆沿着车道走,当前车变道的话估算会变差吗???在这个过程中自车的状态传感器需要非常准吧,如果不准那自车的状态轨迹就不准确了,坐标转换也会不准确吧。。。
应该提到单独使用历史横向偏移的一个主要缺点:远距离范围内的新物体进入距离传感器的检测区域需要很长时间才能为其分配历史横向偏移,即主车辆必须先到达原始位置。当接近速度明显较慢的车辆时,这会产生严重后果。举例来说,假设一辆汽车以自己汽车一半的速度行驶,在 100 米的范围内被检测到。到达这个位置时,另一辆车的距离缩短到 50 米。ACC 或碰撞警告/避让系统必须更早地决定另一辆车对其自身安全舒适行驶的相关性。因此,必须考虑有关前方车道走向的额外预测信息,以实现可靠的系统性能。
幸运的是,我们可以获得缺少的信息。图2和图3说明了两种不同的方法。
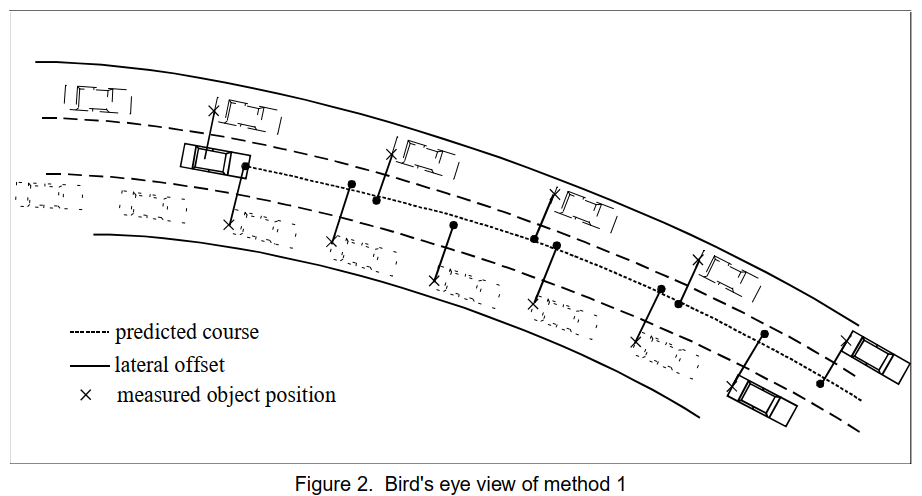
第一种方法的基本思想是使用有关其他车辆的所有数据构建一条预测轨迹。如果没有发生车道变换,则其他车辆的轨迹与主车的预期轨迹相同,只是横向偏移。因此,已确定历史横向偏移的每辆车的测量位置将横向偏移其历史横向偏移的负值。这给出了主车前方的多个点,这些点代表了所有测量轨迹的叠加,这些轨迹移动到主车坐标系的原点。现在,可以将模型轨迹拟合到这些点,从而得到主车的预测轨迹。只要测量了足够数量的车辆,就可以预期统计波动会得到补偿。在这种情况下,车道变换引起的系统误差也将得到一定程度的抑制。
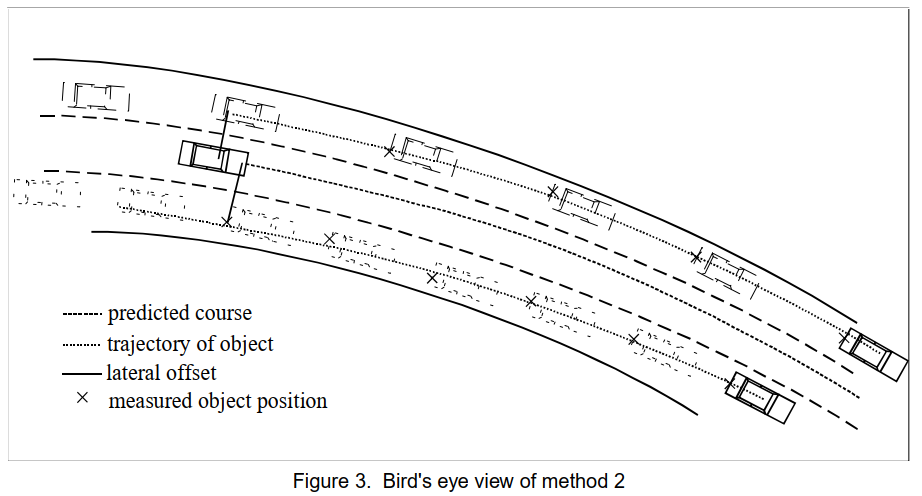
我们认为第二种方法更有效,它分别考虑其他车辆的轨迹。该方法如图 3 所示。
在第二种方法中的意思应该是障碍物的轨迹和自车比较近时(半个车身之类的)认为是要跟踪的目标,如果是新出现的一个障碍物,那是不是可以让他和之前跟踪过的障碍物进行横向距离l1的计算,自车和跟踪过的障碍物进行横向l2计算,在通过abs(l1-l2) 来计算自车和短时间跟踪过的障碍物之间的横向距离。
根据每辆车的测量位置拟合出模型轨迹。从该拟合中可以得出该轨迹的相关参数,如横向偏移和曲率。可以对这些参数进行统计处理,以消除极端值或不合理的值。这会产生参数的平均值,在大多数情况下,这允许通过真实预览预测主车的轨迹。
两种方法之间最显著的区别显而易见。一方面,第二种方法要求每条轨迹的测量位置数量最少,以便进行可靠的拟合。在第一种方法中,甚至可以使用单个测量点,只要已经测量了该物体的历史横向偏移。另一方面,这是该方法最严重的限制:测量数据的使用仅限于那些已经确定了历史横向偏移的物体。
数据采集 – 在每个时间步骤中,距离传感器检测到的所有车辆的位置数据都会被收集起来。距离传感器的跟踪为每个物体分配一个识别号。属于一个识别号的数据被组合在一起,形成相应物体的轨迹。为了说明这一点,想象一下其他车辆在不同时间在道路上的各自位置放置“标记”。然后,轨迹由属于一个物体的这些标记的位置定义。创建新标记时,数据会添加到轨迹中。当主车辆经过其中一个标记时,数据会从轨迹中删除。
当主车辆经过其中一个标记时,数据会从轨迹中删除
存储这些数据的一种有效方法是使用环形缓冲区,每个对象一个。这些环形缓冲区可以看作是一个“数据矩阵”,每行都有一个起始指针和一个结束指针,见图 4。
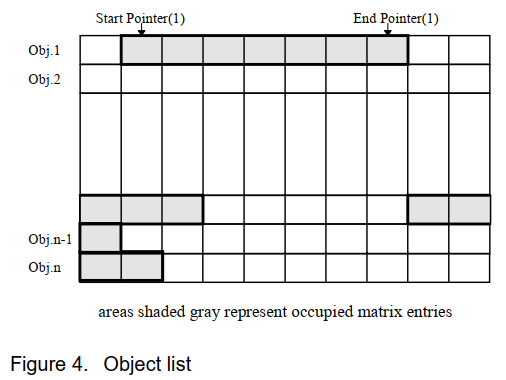
输入新对象数据意味着将相应行的结束指针移动一个条目,并将数据存储在此位置。删除对象的数据通过将起始指针移动一个条目来反映
对于新物体,将使用数据矩阵中的空行。如果没有空行,则必须决定是否清除已占用的行或是否必须拒绝新物体(见下文)。如果物体突然消失(例如离开距离传感器的检测区域),则可以使用其相应的数据,直到主车辆到达最后测量的位置。
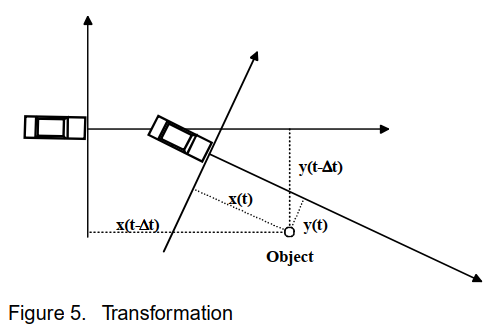
数据是在主车运动过程中收集的。这意味着测量的物体相对位置对应于不同的车辆坐标系。主车会从一个时间步骤平移和旋转。在较早的时间步骤收集的数据必须转换到实际的车辆坐标系。这可以通过补偿主车平移和旋转的变换来实现,见图5。
对这么多历史数据进行坐标转换会不会很耗费计算资源呢???
对于小的时间步长 ∆t,可以显示[2]
[2]. In this approximation sine and cosine can well be replaced by their quadratic approximations.
[2]. 在这个近似中,正弦和余弦可以用它们的二次近似来代替。
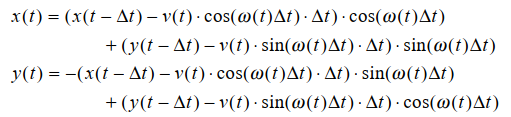
其中 x(t)、y(t) 表示固定位置(道路上的“标记”)相对于主车坐标系在时间 t 的分量,v(t) 表示主车在时间 t 的速度,ω(t) 表示主车的偏航率。因此,在任何时间步骤中,都会测量 v(t) 和 ω(t) 的值,并将 x(t-∆t)、y(t-∆t) 的值更新为 x(t)、y(t)
所用偏航率信号的质量至关重要。恒定偏移会导致严重影响 y(t) 的误差,而 x(t) 则相对稳健。加性白噪声导致的困难较少,因为这种噪声的贡献会随着时间步骤而部分补偿。这可以通过计算闭合路径的轨迹很好地说明,请参阅本文的“测量”部分。
如果偏航率(yawrate)信号质量不好是不是就没法用了?有办法进行矫正吗?
ACC 所需的最大前视距离约为 5 秒。**使用优化的偏航率信号,我们可以估算出在此时间内计算主车横向位置的最大误差约为 0.5 米**。在大多数情况下,实际误差会明显低于这个数字。
是怎么优化的???
另一个关键点是距离传感器提供的物体横向偏移的质量。通常,新物体是在距离传感器的远距离范围内检测到的,特别是横向偏移测量的质量相对较差。上述两种方法都必须使用这些首次测量来尽早确定物体的横向偏移。因此,很明显,距离传感器的精度决定了这两种方法对新物体的反应时间和质量。
曲率和横向偏移的统计评估——在本章中,我们将描述如何根据测量和转换的位置数据计算车道预测数据。
方法 1 使用所有车辆的数据,并计算出历史横向偏移
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2216
2216



 到【灌水乐园】发言
到【灌水乐园】发言








