







 本文详细介绍如何使用Gazebo构建仿真场景,包括地图创建、机器人模型设计与激光雷达传感器配置,以及rvizlaunch文件编写,实现机器人在仿真环境中的可视化与控制。
本文详细介绍如何使用Gazebo构建仿真场景,包括地图创建、机器人模型设计与激光雷达传感器配置,以及rvizlaunch文件编写,实现机器人在仿真环境中的可视化与控制。
仿真软件介绍与制作sdf模型文件:https://blog.youkuaiyun.com/kevin_chan04/article/details/78467218
构建仿真场景:https://blog.youkuaiyun.com/qq_36355662/article/details/80030372
编写xacro仿真模型文件和rviz launch文件:https://zhuanlan.zhihu.com/p/67741739
gazebo中构建一个仿真的地图非常的简单,因为他提供了很多的地图模型,可以直接拖到界面中使用,但是首先需要下载相关的模型:
1.模型下载
1、直接从终端下载,执行以下命令
cd ~/.gazebo/
mkdir -p models
cd ~/.gazebo/models/
wget http://file.ncnynl.com/ros/gazebo_models.txt
wget -i gazebo_models.txt
ls model.tar.g* | xargs -n1 tar xzvf
2.利用百度网盘和国内官网下载
全部模型有大约200多M,但在线下载速度非常慢,晚上离开实验室早上来了就下完了。不过现在小伙伴已经将其共享至网盘,可直接下载,然后将其解压至~/.gazebo/models里。
链接:http://pan.baidu.com/s/1pKaeg0F 密码:cmxc (来自rosclub.cn)
百度网盘和国内官网并没有及时保持和官网同步更新,推荐大家还是通过官网下载,实在是慢的话可以通过百度网盘和ExBot ROS 专区下载。
下载后把文件放在.gazebo下的models
1.1制作简单的场景地图
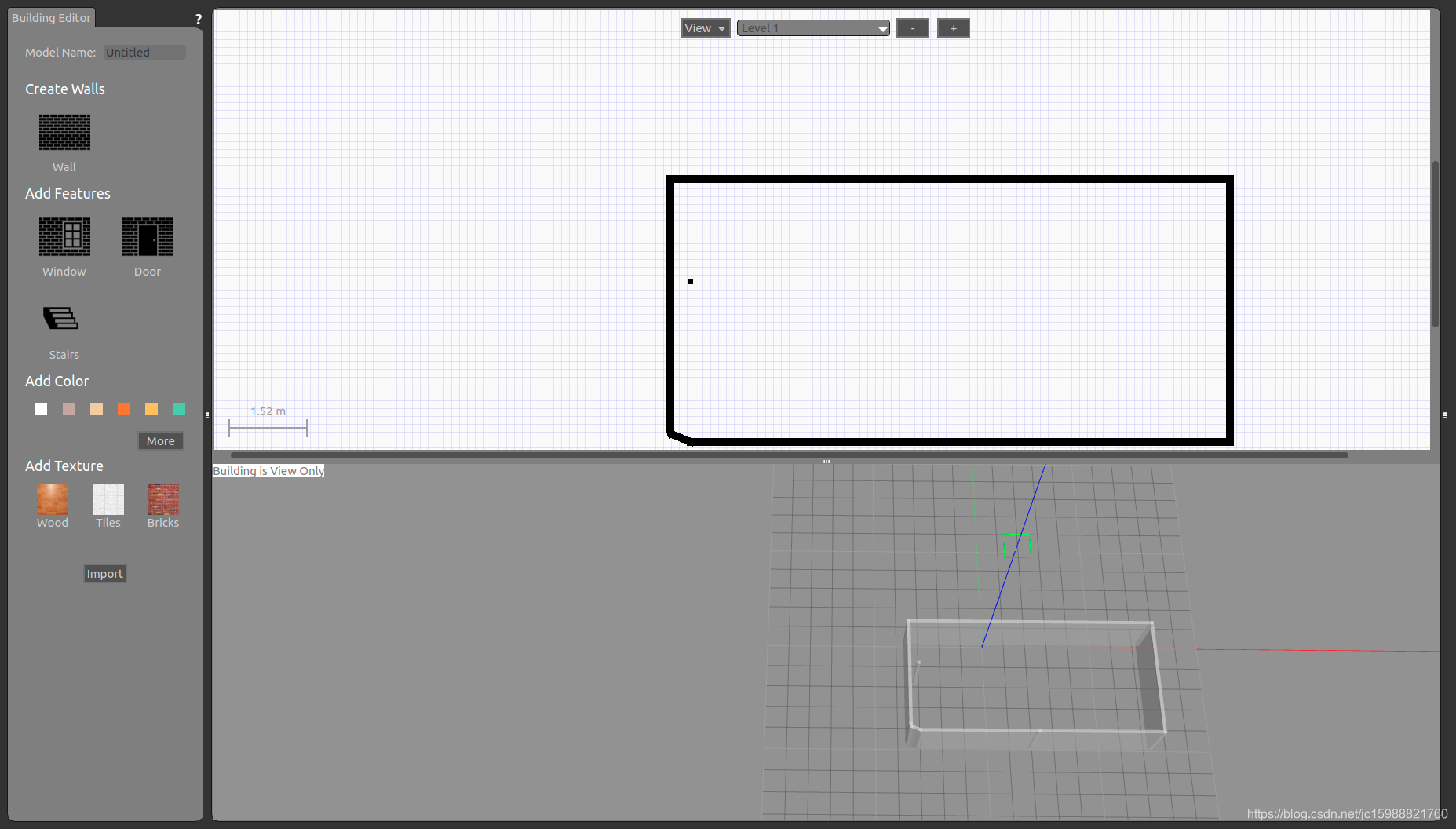
制作简单的矩形场地可以直接进入 Edit-->Building Editor,然后选择墙壁拖拽即可,如图所示,编辑完成之后选择File-->save as-->选择目录,编辑名字,即可保存一个文件夹,里面有两个文件后缀名分别为.config和.sdf格式。再次点击File-->exit,点击确认之后退出,再次点击File->Save World As选择目录即可保存地图,地图格式为xxx.world。
2.制作机器人模型
2.1定义机器人主体部分
为了在 gazebo 中导入机器人模型,你需要先完成 URDF 模型。在这里我们将使用.xacro文件,虽然这可能更复杂,但是对于代码开发来说其功能非常强大。
我们首先将机器人的经常用到的值,使用变量进行定义,主要包括常用常数以及机器人属性:
<!-- PROPERTY LIST -->
<xacro:property name="M_PI" value="3.1415926"/>
<!--圆柱体的定义需要长度length及半径radius-->
<xacro:property name="base_radius" value="0.20"/>
<xacro:property name="base_length" value="0.16"/>
<!--轮子也是一种圆柱体,同时要通过关节与主体连接 -->
<xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<!--关节的位置属性定义,由于关节需要将主体与轮子无缝连接,因此在x或者y方向上,一般定义为主体半径大小 -->
<xacro:property name="wheel_joint_y" value="0.19"/>
<xacro:property name="wheel_joint_z" value="0.05"/>
<!-- --> <xacro:property name="caster_radius" value="0.015"/>
<!-- wheel_radius - ( base_length/2 - wheel_joint_z) -->
<xacro:property name="caster_joint_x" value="0.18"/> 接下来进行颜色定义:
<!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material> <material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material> 通过宏定义机器人的轮子,方便代码复用:
<xacro:macro name="wheel"
params="prefix reflect">
<joint name="${prefix_wheel_joint} " type="continuous">
<!--continuous 表示是可以360度旋转的joint-->
<origin xyz="0 ${reflect*wheel_joint_y}
${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="gray" />
</visual> </link> </xacro:macro> 定义机器人的支撑轮:
<!-- Macro for robot caster -->
<xacro:macro name="caster" params="prefix reflect">
<joint name="${prefix}_caster_joint" type="continuous">
<!---(base_length/2 + caster_radius)表示一半在外面,一半在里面-->
<origin xyz="${reflect*caster_joint_x} 0 ${-(base_length/2 + caster_radius)}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="black" />
</visual>
</link>
</xacro:macro>
定义机器人主体:
<xacro:macro name="mbot_base">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow" />
</visual>
</link>
<wheel prefix="left" reflect="-1"/>
<wheel prefix="right" reflect="1"/>
<caster prefix="front" reflect="-1"/>
<caster prefix="back" reflect="1"/> </xacro:macro>
<visual></visual>中内容为在rviz 中显示相应的模型,collision中的内容为gazebo中的物理模型。
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow" />
</visual>
<collision>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
</collision>
并为该关节设置物理惯性
<cylinder_inertial_matrix m="${base_mass}" r="${base_radius}" h="${base_length}" />
</link>设置机器人主体与地图的关联,地图为parent,主体味child,相对关系有origin xyz确定
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2 + caster_radius*2}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint>完整代码如下:
<?xml version="1.0"?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- PROPERTY LIST -->
<xacro:property name="M_PI" value="3.1415926"/>
<xacro:property name="base_mass" value="20" />
<xacro:property name="base_radius" value="0.2"/>
<xacro:property name="base_length" value="0.16"/>
<xacro:property name="wheel_mass" value="2" />
<xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<xacro:property name="wheel_joint_y" value="0.19"/>
<xacro:property name="wheel_joint_z" value="0.05"/>
<xacro:property name="caster_mass" value="0.5" />
<xacro:property name="caster_radius" value="0.015"/> <!-- wheel_radius - ( base_length/2 - wheel_joint_z) -->
<xacro:property name="caster_joint_x" value="0.18"/>
<!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<!-- Macro for inertia matrix -->
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
</inertial>
</xacro:macro>
<!-- Macro for robot wheel -->
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint" type="continuous">
<origin xyz="0 ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="gray" />
</visual>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}" />
</link>
<gazebo reference="${prefix}_wheel_link">
<material>Gazebo/Gray</material>
</gazebo>
<!-- Transmission is important to link the joints and the controller -->
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_wheel_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<!-- Macro for robot caster -->
<xacro:macro name="caster" params="prefix reflect">
<joint name="${prefix}_caster_joint" type="continuous">
<origin xyz="${reflect*caster_joint_x} 0 ${-(base_length/2 + caster_radius)}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="black" />
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
</collision>
<sphere_inertial_matrix m="${caster_mass}" r="${caster_radius}" />
</link>
<gazebo reference="${prefix}_caster_link">
<material>Gazebo/Black</material>
</gazebo>
</xacro:macro>
<xacro:macro name="mbot_base_gazebo">
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<gazebo reference="base_footprint">
<turnGravityOff>false</turnGravityOff>
</gazebo>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2 + caster_radius*2}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint>
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow" />
</visual>
<collision>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${base_mass}" r="${base_radius}" h="${base_length}" />
</link>
<gazebo reference="base_link">
<material>Gazebo/Yellow</material>
</gazebo>
<wheel prefix="left" reflect="-1"/>
<wheel prefix="right" reflect="1"/>
<caster prefix="front" reflect="-1"/>
<caster prefix="back" reflect="1"/>
<!-- controller -->
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<!--robotNamespace>/</robotNamespace-->
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_wheel_joint</leftJoint>
<rightJoint>right_wheel_joint</rightJoint>
<wheelSeparation>${wheel_joint_y*2}</wheelSeparation>
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_footprint</robotBaseFrame>
</plugin>
</gazebo>
</xacro:macro>
</robot>2.2编写激光雷达模型文件lidar_gazebo.xacro文件
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="laser">
<xacro:macro name="rplidar" params="prefix:=laser">
<!-- Create laser reference frame -->
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<cylinder length="0.06" radius="0.05"/>
</geometry>
</collision>
</link>
<gazebo reference="${prefix}_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="${prefix}_link">
<sensor type="ray" name="rplidar">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>5.5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3</min_angle>
<max_angle>3</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>6.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so">
<topicName>scan</topicName>
<frameName>laser_link</frameName>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>2.3编写主文件mbot_with_laser_gazebo.xacro
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find mbot_description)/urdf/xacro/gazebo/mbot_base_gazebo.xacro" />
<xacro:include filename="$(find mbot_description)/urdf/xacro/sensors/lidar_gazebo.xacro" />
<xacro:property name="lidar_offset_x" value="0" />
<xacro:property name="lidar_offset_y" value="0" />
<xacro:property name="lidar_offset_z" value="0.16" />
<!-- lidar -->
<joint name="lidar_joint" type="fixed">
<origin xyz="${lidar_offset_x} ${lidar_offset_y} ${lidar_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="laser_link"/>
</joint>
<xacro:rplidar prefix="laser"/>
<mbot_base_gazebo/>
</robot>3.rviz launch文件编写
这里我们首先验证,其是否可以在rviz中进行显示,编写rviz的launch文件。
joint_state_publisher、robot_state_publisher、rviz是进行机器人仿真的必备节点。
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- 运行rviz可视化界面 args="-d $(find mbot_sim)/config/mbot.rviz"-->
<node name="rviz" pkg="rviz" type="rviz" required="true" />
同时运行我们刚刚设定好的xacro文件以及关节控制插件:
<arg name="model" default="$(find xacro)/xacro --inorder '$(find mbot_sim)/urdf/xacro/mbot.xacro'" />
<arg name="gui" default="true" />
<!--命令行参数,表示执行此命令-->
<param name="robot_description" command="$(arg model)" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="$(arg gui)"/>rviz launch文件完整内容:mbot_laser_gazebo.launch 文件,并加载自己构建的地图rectangle2.world
<launch>
<!-- 设置launch文件的参数 -->
<arg name="world_name" value="$(find mbot_gazebo)/worlds/rectangle2.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_with_laser_gazebo.xacro'" />
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mbot -param robot_description"/>
</launch>
















 331
331

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









