







 该专栏为热销专栏榜 第1名
该专栏为热销专栏榜 第1名一、本文介绍
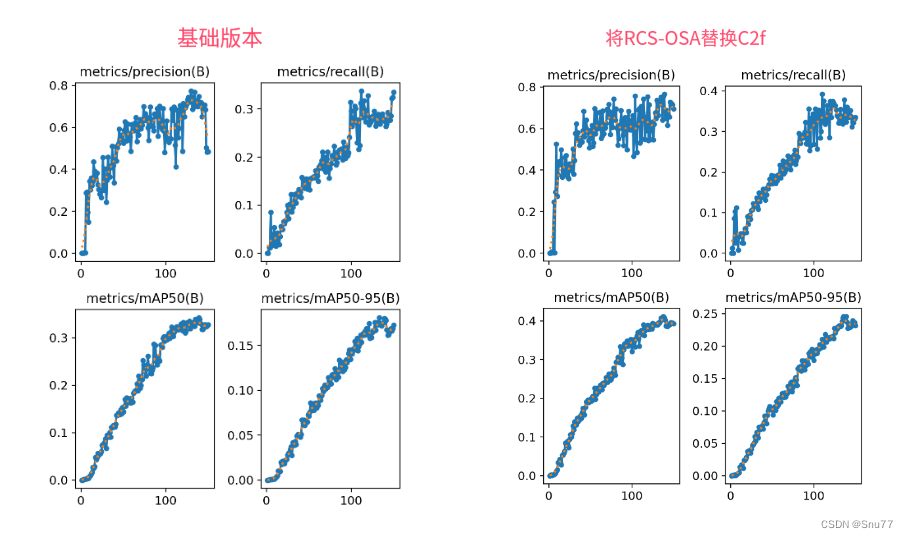
本文给大家带来的改进机制是RCS-YOLO提出的RCS-OSA模块,其全称是"Reduced Channel Spatial Object Attention",意即"减少通道的空间对象注意力"。这个模块的主要功能是通过减少特征图的通道数量,同时关注空间维度上的重要特征,来提高模型的处理效率和检测精度。亲测在小目标检测和大尺度目标检测的数据集上都有大幅度的涨点效果(mAP直接涨了大概有0.06左右)。同时本文对RCS-OSA模块的框架原理进行了详细的分析,不光让大家会添加到自己的模型在写论文的时候也能够有一定的参照,最后本文会手把手教你添加RCS-OSA,以及C3k2-RepVGG模块到网络结构中。
目录

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 7309
7309

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











