







一、本文介绍
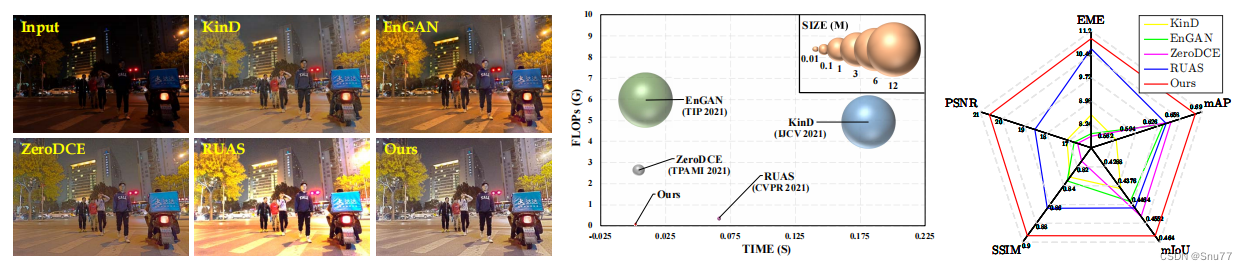
本文给大家带来的改进机制是低照度图像增强网络SCINet,SCINet(自校正照明网络)是一种专为低光照图像增强设计的框架。它通过级联照明学习过程和权重共享机制来处理图像,优化了照明部分以提升图像质量。我将该网络集成在YOLOv10的主干上针对于图像的输入进行增强,同时该网络的并不会增加参数和计算量,基本和普通的网络结构保持一致,同时该结构支持自定义调节层数,来控制图像增强的效果 ,非常适合想要在黑夜目标检测领域发表文章的读者,该基本网络不会影响模型的速度。
欢迎大家订阅我的专栏一起学习YOLO!
![]()
目录

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 2752
2752

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











