




 该专栏为热销专栏榜 第7名
该专栏为热销专栏榜 第7名 本文介绍了PE-YOLO,一种针对暗光环境的物体检测模型,通过PENet增强图像细节和低频信息。PE-YOLO结合了YOLOv3和PENet,包含DPM和LEF模块,提升低照度条件下的检测性能。文章详细讲解了PENet、DPM和LEF的工作原理,并提供了核心代码修改和运行记录。
本文介绍了PE-YOLO,一种针对暗光环境的物体检测模型,通过PENet增强图像细节和低频信息。PE-YOLO结合了YOLOv3和PENet,包含DPM和LEF模块,提升低照度条件下的检测性能。文章详细讲解了PENet、DPM和LEF的工作原理,并提供了核心代码修改和运行记录。
一、本文介绍
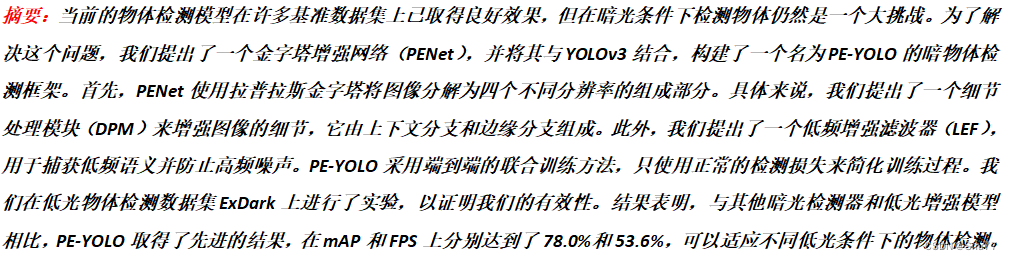
本文给大家带来的改进机制是低照度图像增强网络PE-YOLO中的PENet,PENet通过拉普拉斯金字塔将图像分解成多个分辨率的组件,增强图像细节和低频信息。它包括一个细节处理模块(DPM),用于通过上下文分支和边缘分支增强图像细节,以及一个低频增强滤波器(LEF),以捕获低频语义并减少高频噪声。同时该网络的发布版本并不完善,存在二次创新的机会,后期我会将其网络进行二次创新,增强低照度的检测性能。同时该网络发布版本存在Bug我也已经修复。欢迎大家订阅本专栏,本专栏每周更新3-5篇最新机制,更有包含我所有改进的文件和交流群提供给大家。
欢迎大家订阅我的专栏一起学习YOLO!
目录
二、PE-YOLO算法原理
论文地址: 官方论文地址
代码地址: 官方代码地址

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1531
1531

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











