




 本文详细介绍了如何配置树莓派的串口通信,包括全双工工作原理和关键参数设置。重点讲解了WiringPi库的API使用,如打开串口、数据传输、初始化配置以及PC串口调试。通过实例演示,展示如何定时发送字符和接收指令并响应字符串输出。
本文详细介绍了如何配置树莓派的串口通信,包括全双工工作原理和关键参数设置。重点讲解了WiringPi库的API使用,如打开串口、数据传输、初始化配置以及PC串口调试。通过实例演示,展示如何定时发送字符和接收指令并响应字符串输出。
参考博文
https://www.cnblogs.com/lulipro/p/5992172.html
串口通信的工作方式
全双工允许通信双方同时互传数据;半双工不可同时,一方发送时,另一方只能接收。串口通信属于全双工。
串口通信注重什么
- 数据格式
数据位,停止位,奇偶校验位 - 波特率
波特率(Baud Rate) 单位 bps – 每秒传送的 字节数 Byte Per Second.。
波特率(Baud Rate) 单位 bps – 每秒传送的 字节数 Byte Per Second.。
一、常用API
包含头文件#include <wiringSerial.h>
| 函数 | 参数 | 作用 |
|---|---|---|
| int serialOpen (char *device, int baud) | device:串口的地址,即设备所在的目录。默认"/dev/ttyAMA0" 返回值:正常返回文件描述符,否则返回-1失败。 | 打开并初始串口 |
| int serialDataAvail(int fd) | 返回:串口缓存中已经接收的,可读取的字节数,-1代表错误 | 获取串口缓存中可用的字节数。 |
| void serialPutchar (int fd, unsigned char c) | c:要发送的数据 | 发送一个字节的数据到串口 |
| void serialPuts (int fd, char *s) | s:发送的字符串,字符串要以’\0’结尾 | 发送一个字符串到串口 |
| int serialGetchar (int fd) | 返回:读取到的字符 | 从串口读取一个字节数据返回。如果串口缓存中没有可用的数据,则会等待10秒,如果10后还没有,返回-1。所以在读取前,通过serialDataAvail判断。 |
初次使用需要配置
cd /boot/
sudo vim cmdline.txt
删除字符串”console=ttyAMA0,115200“
解除串口用于信息的打印,打印启动字符以及一些调试界面等。目的是把串口用于正常的数据通信
②重启
sudo reboot
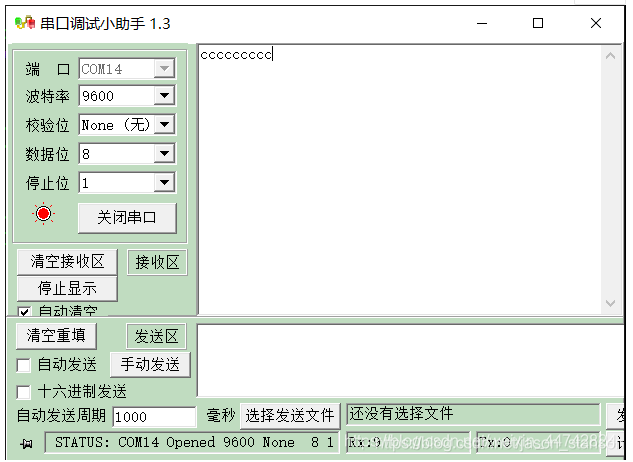
树莓派向电脑串口每隔1s发送一个字符c
#include <wiringPi.h>
#include <wiringSerial.h>
#include <stdio.h>
int main()
{
int fd;
if(-1 == wiringPiSetup()){
printf("硬件初始化失败\n");
}
fd = serialOpen("/dev/ttyAMA0",9600);
while(1){
serialPutchar(fd,'c');
delayMicroseconds(1000000);
}
return 0;
}
运行程序,打开PC串口调试助手
发送数据 返回字符串
#include <wiringPi.h>
#include <wiringSerial.h>
#include <stdio.h>
int main()
{
int fd;
int cmd;
wiringPiSetup(); //硬件初始化
fd = serialOpen("/dev/ttyAMA0",9600); //和文件描述符很像 先打开串口 波特率9600 后续操作用fd
while(1){
while(serialDataAvail(fd)!= -1){ //先判断串口是否有数据 没有就阻塞 有的话返回值非-1 进入循环
cmd = serialGetchar(fd); //cmd接受得到的字符
if(cmd == '1'){ //根据字符 输出相应内容
serialPuts(fd,"haha1\r\n");
}else if(cmd=='2'){
serialPuts(fd,"haha2\r\n");
}else if(cmd=='3'){
serialPuts(fd,"haha3\r\n");
}
}
}
return 0;
}

















 3884
3884

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









