






 该博客介绍了如何将YOLOv5s模型转换为ONNX格式,并在ONNXRuntime上进行推理。首先,通过pip安装onnxruntime,然后使用YOLOv5源码的export.py将模型导出为onnx。接着,利用ONNXRuntime进行推理,得到包含多个检测框及其信息的结果矩阵。在非极大值抑制阶段,分别进行了置信度抑制和IOU抑制,以减少冗余检测框,提高目标检测的准确性。最后,提供了nms函数的实现,用于完成这一过程。
该博客介绍了如何将YOLOv5s模型转换为ONNX格式,并在ONNXRuntime上进行推理。首先,通过pip安装onnxruntime,然后使用YOLOv5源码的export.py将模型导出为onnx。接着,利用ONNXRuntime进行推理,得到包含多个检测框及其信息的结果矩阵。在非极大值抑制阶段,分别进行了置信度抑制和IOU抑制,以减少冗余检测框,提高目标检测的准确性。最后,提供了nms函数的实现,用于完成这一过程。
首先,使用onnxruntime模型推理比使用pytorch快很多,所以模型训练完后,将模型导出为onnx格式并使用onnxruntime进行推理部署是一个不错的选择。接下来就逐步实现yolov5s在onnxruntime上的推理流程。
1、安装onnxruntime
pip install onnxruntime
2、导出yolov5s.pt为onnx,在YOLOv5源码中运行export.py即可将pt文件导出为onnx。
3、使用onnx进行推理,这一步只能获取模型推理产生的候选框,拿到推理结果后还需要进行下一步处理,通过非极大值抑制对候选框进行筛选。
使用onnx加载yolov5s.onnx模型,进行推理计算,打印推理结果:
height, width = 640, 640
img0 = cv2.imread('img.jpg')
img = cv2.resize(img0, (height, width)) # 尺寸变换
img = img / 255.
img = img[:, :, ::-1].transpose((2, 0, 1)) # HWC转CHW
data = np.expand_dims(img, axis=0) # 扩展维度至[1,3,640,640]
sess = rt.InferenceSession('yolov5s.onnx')
input_name = sess.get_inputs()[0].name
label_name = sess.get_outputs()[0].name
pred_onx = sess.run([label_name], {input_name: data.astype(np.float32)})[0]
pred = np.squeeze(pred_onx)
print(pred)
print(pred.shape)
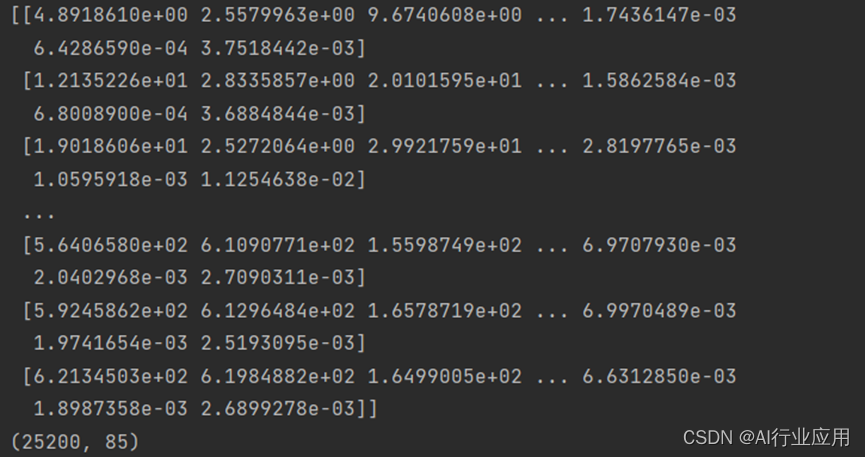
此时打印的推理结果矩阵为[25200, 85],意味着有25200个检测框,每个检测框包含85个结果,85个结果中[0~3]为xywh,即检测框中心坐标和检测框宽高,[4]为每个检测框置信度,[5~85]为coco数据集80个分类对应预测结果。
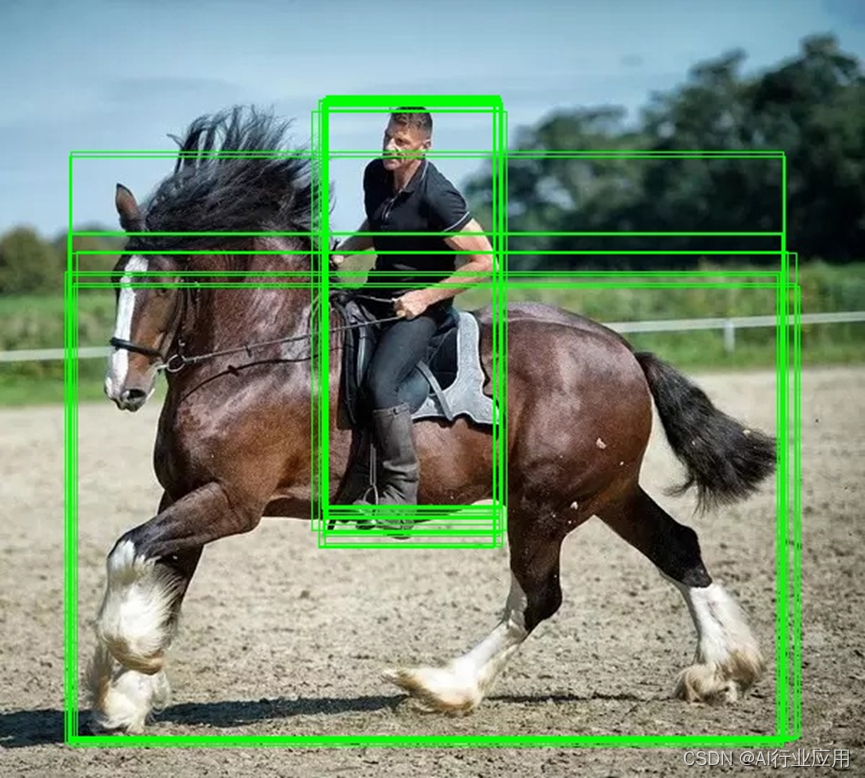
显然拿到直接的推理结果还无法在图像上进行准确的目标绘制,接下来还要进行非极大值抑制才能获取准确推理结果。
4、非极大值抑制:非极大值抑制可以采用OpenCV等接口实现,也可以手动实现。这里根据非极大值原理进行手动实现。
非极大值抑制分为置信度和iou抑制。首先进行置信度抑制,此处置信度为检测框置信度而非分类结果的置信度,设置检测框置信度阈值0.25。
置信度抑制非常简单,即根据置信度阈值,移除阈值以下的候选框,保留阈值以上的候选框进入下一步处理。使用一张图像进行测试,输出结果为(27,85),即剩下27个检测框。
在iou抑制之前,先对所有候选框列表进行置信度排序,然后从候选框列表中找出不同类别候选框形成子列表候选框。
iou抑制整体思路:对每个类别候选框取出最大置信度候选框优先输出,再通过最大置信度候选框与其他候选框计算iou,通过iou阈值判断,大于iou阈值则删除,循环计算直至候选框列表为空。
最后将保留的候选框输出,在图像上绘制检测结果。
非极大值抑制实现:
def nms(pred, conf_thres, iou_thres):
# 置信度抑制,小于置信度阈值则删除
conf = pred[..., 4] > conf_thres
box = pred[conf == True]
# 类别获取
cls_conf = box[..., 5:]
cls = []
for i in range(len(cls_conf)):
cls.append(int(np.argmax(cls_conf[i])))
# 获取类别
total_cls = list(set(cls)) #删除重复项,获取出现的类别标签列表,example=[0, 17]
output_box = [] #最终输出的预测框
# 不同分类候选框置信度
for i in range(len(total_cls)):
clss = total_cls[i] #当前类别标签
# 从所有候选框中取出当前类别对应的所有候选框
cls_box = []
for j in range(len(cls)):
if cls[j] == clss:
box[j][5] = clss
cls_box.append(box[j][:6])
cls_box = np.array(cls_box)
box_conf = cls_box[..., 4] #取出候选框置信度
box_conf_sort = np.argsort(box_conf) #获取排序后索引
max_conf_box = cls_box[box_conf_sort[len(box_conf) - 1]]
output_box.append(max_conf_box) #将置信度最高的候选框输出为第一个预测框
cls_box = np.delete(cls_box, 0, 0) #删除置信度最高的候选框
while len(cls_box) > 0:
max_conf_box = output_box[len(output_box) - 1] #将输出预测框列表最后一个作为当前最大置信度候选框
del_index = []
for j in range(len(cls_box)):
current_box = cls_box[j] #当前预测框
interArea = getInter(max_conf_box, current_box) #当前预测框与最大预测框交集
iou = getIou(max_conf_box, current_box, interArea) # 计算交并比
if iou > iou_thres:
del_index.append(j) #根据交并比确定需要移出的索引
cls_box = np.delete(cls_box, del_index, 0) #删除此轮需要移出的候选框
if len(cls_box) > 0:
output_box.append(cls_box[0])
cls_box = np.delete(cls_box, 0, 0)
return output_box
最终推理结果:





















 6725
6725

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











