 狄克斯特拉算法解析
狄克斯特拉算法解析





 本文详细介绍了狄克斯特拉算法的基本原理及其在加权图中的应用,特别强调了算法适用于有向无环图且权重不能为负的情况,并通过一个具体的代码示例展示了算法的具体实现过程。
本文详细介绍了狄克斯特拉算法的基本原理及其在加权图中的应用,特别强调了算法适用于有向无环图且权重不能为负的情况,并通过一个具体的代码示例展示了算法的具体实现过程。
读书笔记
- 狄克斯特拉算用来寻找加权图的“最短路径”(不一定是段数最少,我们需要一定的量度,比如说最少花费,最短时间等,bfs只是解决了段数的最短路径问题)
- 鉴于无向图就是一个环,而此算法只适用于有向无环图!
- 权重永不能为负!否则狄克斯特拉算法失效(使用贝尔曼-福德算法??)
- 大致步骤:
- 找出起点出发权重最小的节点A(遍历起点的邻居),记录起点邻居的“开销”(从起点一步步来到该点的当前可知的最短步数,适用于所有的节点),其余的节点开销为无穷大,此外还需记录每一个节点的父节点(可以导致当前开销的上一个节点,随开销的更新而更新)
- 遍历A的邻居,检查从A出发到此是否可以缩短其开销,如果缩短了就更新此节点的开销(无穷大的意义在此),同时更新父节点,这个操作遍历A的所有未被检查过的邻居
- 检查完毕我们可以将A标记为已经经检查过了(专门的记录数组),然后返回过程1,直到所有的节点都被标记检查过了
- 结合记录下的父节点从终点到起点“顺藤摸瓜”,其路径就是最短权重路径!
(进一步学习通道:Dijkstra(简单的狄克斯特拉算法Python实现))
代码尝试
(能力有限,其实是抄袭的当作练习了~注释是自己的。。。)
(感谢膜拜大佬!)
殊不知自己摸到了最小生成树,尽可能理解一下吧:
#include<iostream>
#include<cstdio>
using namespace std;
#define INF 100000000//足够表示无穷大了
#define MAXNODE 100//最高的节点数目,视情况而定,我给的例子数目很小的
typedef int infotype;
typedef struct {
int node;//顶点的编号(从 0 开始)
infotype info;//顶点的其他信息
}VertexType;//结构名
typedef struct {//定义图
int edges[MAXNODE][MAXNODE];//临接矩阵
int n, e;//定点数,弧数
VertexType vexs[MAXNODE];//存放顶点信息
}MGraph;
void Ppath(int path[], int i, int v) {//依照 path[] 存放的“父节点”顺藤摸瓜查找路径上的节点,递归思想!!
int k;
k = path[i];// k 是 i 的“父节点”
if (k == v) return;//找到了起点则返回
Ppath(path, k, v);//找顶点 k 的前一个节点
cout << k << ',';//输出顶点 k
}
void Dispath(int dist[], int path[], int s[], int n, int v) {//输出最短路径
int i;
for (i = 0;i < n;i++) {
if (s[i] == 1) {//被检查完毕的节点已经得出了最短路径
cout << "从" << v << "到" << i << "的最短路径长度为:" << dist[i] << "\t路径为:";
cout << v << ',';//路径起点
Ppath(path, i, v);//路径上的中间点
cout << i << endl; //路径的终点
}
else cout << "从" << v << "到" << i << "不存在路径" << endl;
}
}
void Dijkstra(MGraph g, int v) {
int dist[MAXNODE], path[MAXNODE];
int s[MAXNODE];
int mindis, i, j, u;
for (i = 0;i < g.n;i++) {
dist[i] = g.edges[v][i];//距离初始化
s[i] = 0;//s[] 置空,表示暂时未被标记,该函数到这里只是检查源点的所有邻居
if (g.edges[v][i] < INF) path[i] = v;//“父节点”更新
else path[i] = -1;//暂未找到“父节点”
}
s[v] = 1;//标记初始点检查完毕(所有邻居遍历完毕)
path[v] = 0;
for (i = 0;i < g.n;i++) {//循环直到所有顶点的最短路径都求出
mindis = INF;//mindis 放置最小长度初值
for (j = 0;j < g.n;j++) {//选取不在 s 中并且具有最小距离的顶点 u
if (s[j] == 0 && dist[j] < mindis) {
u = j;mindis = dist[j];
}
}
s[u] = 1;//顶点 u 加入 s
for (j = 0;j < g.n;j++) {//修改不在 s 中的顶点的距离
if (s[j] == 0) {
if (g.edges[u][j] < INF && dist[u] + g.edges[u][j] < dist[j]) {
dist[j] = dist[u] + g.edges[u][j];path[j] = u;//更新 u 的邻居的最短路径及“父节点”
}
}
}
}
Dispath(dist, path, s, g.n, v);//输出最短路径
}
int main() {
int i, j;
MGraph g;
g.n = 7;g.e = 12;
int a[7][MAXNODE] = {
{0,4,6,6,INF,INF,INF},
{INF,0,1,INF,7,INF,INF},
{INF,INF,0,INF,6,4,INF},
{INF,INF,2,0,INF,5,INF},
{INF,INF,INF,INF,0,INF,6},
{INF,INF,INF,INF,1,0,8},
{INF,INF,INF,INF,INF,INF,0}
};
for (i = 0;i < g.n;i++) {
for (j = 0;j < g.n;j++) {
g.edges[i][j] = a[i][j];
}
}
cout << "最小生成树构成:" << endl;
Dijkstra(g, 0);
cout << endl;
return 0;
}
/*终极注释:
看一看我们狄克斯特拉算法需要的因素对应的成分:
edges[][]:生成邻接矩阵,就是我放的表格,存放输入数据
node:顶点的编号,记录每一个节点
MGraph.n: node 的个数
MGraph.e:边的个数
dist[]:最短路将,比如 dist[1] 代表从 v(源点)到 1 的最短路径(加权)
path[]:记录当前发现的最短路径的节点的“父节点”,不断更新
s[]:记录节点是否被检查过了,检查完毕就标记
void Dijkstra(MGraph g,int v) 函数实现过程体现了狄克斯特拉算法的流程,
需要我细细咀嚼,我竟然理解了!!下面要靠自己勤于练习会自己写代码啦!*/
额,这个输入的图有点抽象,我解释一下:
进一步解释
首先根据邻接矩阵画出来是这样:
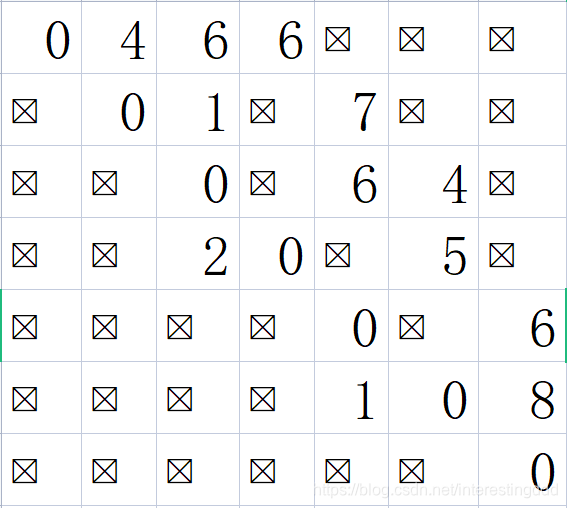
我们规定左上角坐标(0,0),右下角(6,6),以此类推,对于每一个位置,规定对应的数值为f(x,y),那么我们这样说:
从 x 到 y 的路线权重为 f(x,y)(注意叉号指的是无穷大)
我们要找到所要求的最小权重路线,本文中使用狄克斯特拉算法实现,下面是我们根据上表画出来的关系图:
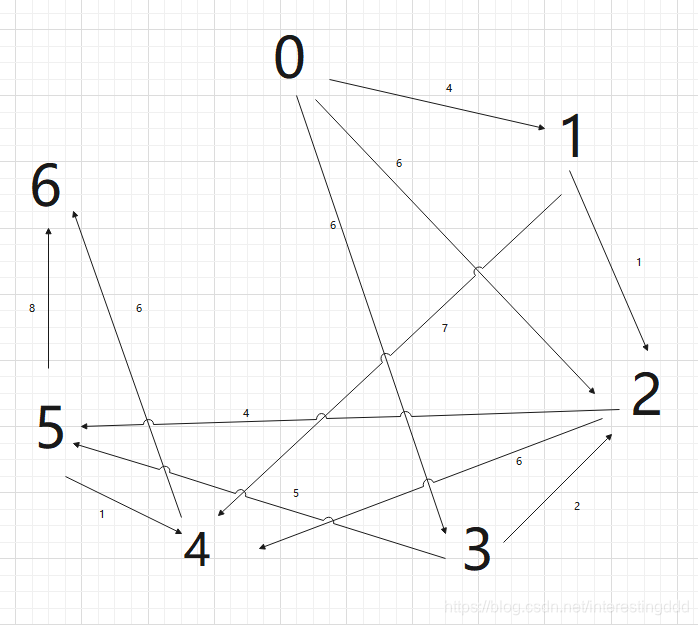
符合狄克斯特拉算法的使用条件,所以接下来好好理解上面的代码吧!(重要信息放在注释了~)
附:贝尔曼·福德算法思想

















 500
500

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









