







CYW20829的PWM(脉冲宽度调制)配置是一个涉及硬件和软件设置的过程,旨在通过调整PWM信号的占空比来控制LED或其他外设的亮度或功率。
一、软件环境准备
- 开发工具:使用Eclipse IDE for Modustoolbox™ soffware 作为开发工具,这是英飞凌官方推荐的开发环境。
- 软件安装:从英飞凌官网下载并安装ModusToolbox,同时确保安装了适用于CYW20829的SDK和相关工具链。
二、项目创建与配置
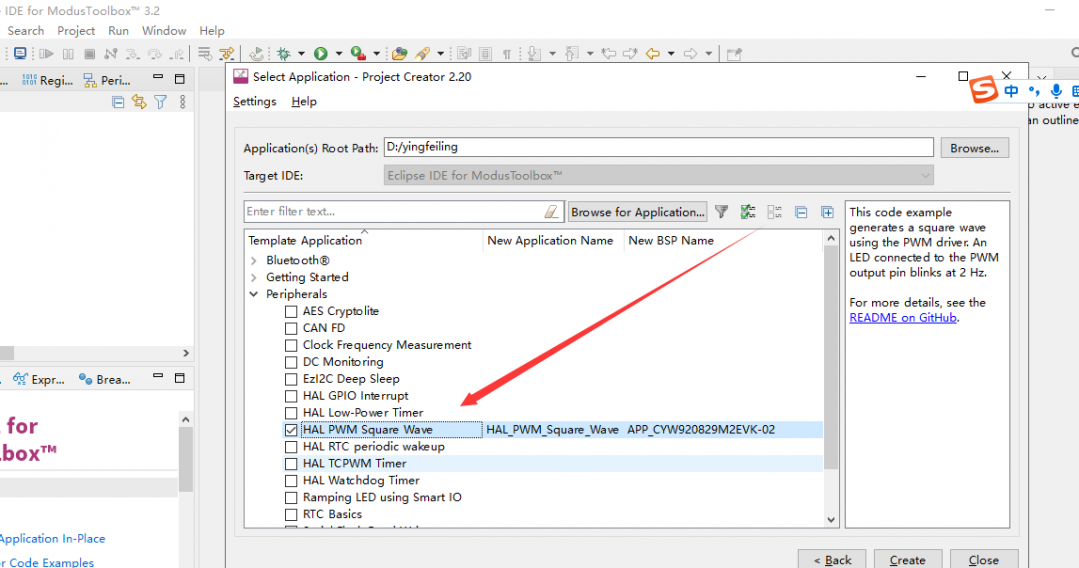
- 新建项目:在ModusToolbox中创建一个新的项目,并输入工程名称,选择对应的芯片型号(CYW20829)。
- 硬件配置:
- 使用Device Configurator(设备配置工具)来配置硬件资源,包括GPIO、PWM和Timer等。
- 将需要控制的LED(如CYBSP_USER_LED1)配置为PWM输出,用于实现呼吸灯效果。
- 如有需要,将其他LED(如CYBSP_USER_LED2)配置为普通GPIO输出,用于周期闪烁或其他用途。
三、PWM配置
- 外设配置:
- 在外设配置窗口中,设置PWM的相关参数,包括时钟源、分辨率(通常是一个较大的数,如10000,用于更精细地控制占空比)等。
- 确保TCPWM(定时器/计数器/PWM)模块被正确配置并启用。
- PWM结构体声明:
- 在代码中声明PWM结构体变量,如cyhal_pwm_t pwm_led1_control;,用于控制特定的LED。
- PWM初始化:
- 使用cyhal_pwm_init_cfg()函数初始化PWM,并传入相应的配置参数和硬件抽象层(HAL)配置。
- 调用cyhal_pwm_start()函数启动PWM。
-
-
四、定时器配置
- 定时器结构体声明:
- 声明定时器结构体变量,如cyhal_timer_t timer_obj;,并定义一个计数器变量(如uint16_t timer_count = 2000;)用于控制PWM占空比的变化周期。
- 定时器初始化:
- 使用cyhal_timer_init_cfg()函数初始化定时器,并配置其回调函数(ISR,中断服务例程)。
- 在回调函数中,根据计数器的值调整PWM的占空比,并在必要时重置计数器或切换其他LED的状态。
- 定时器启动:
- 调用cyhal_timer_start()函数启动定时器。
-
-
复制
<div style="background-color: rgb(255, 255, 255); padding-left: 2px;"><div style="color: rgb(0, 0, 0); font-family: Consolas; font-size: 10pt; white-space: pre;"><p><span style="color:#7f0055;font-weight:bold;">void</span> <span style="font-weight: bold;">handle_error</span>(<span style="color:#005032;">cy_rslt_t</span> status)</p><p>{</p><p> <span style="color:#7f0055;font-weight:bold;">if</span> (CY_RSLT_SUCCESS != status)</p><p> {</p><p> <span style="color:#3f7f5f;">/* Halt the CPU while debugging */</span></p><p> CY_ASSERT(0);</p><p> }</p><p>}</p></div></div> -
复制
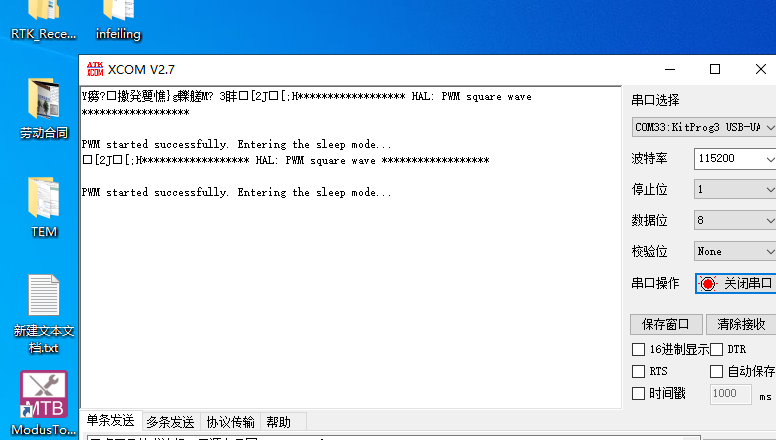
void check_status(char *message, cy_rslt_t status) { if (CY_RSLT_SUCCESS != status) { printf("\r\n=====================================================\r\n"); printf("\nFAIL: %s\r\n", message); printf("Error Code: 0x%08" PRIX32 "\n", status); printf("\r\n=====================================================\r\n"); while(true); } } int main(void) { /* PWM object */ cyhal_pwm_t pwm_led_control; /* API return code */ cy_rslt_t result; #if defined(CY_DEVICE_SECURE) cyhal_wdt_t wdt_obj; /* Clear watchdog timer so that it doesn't trigger a reset */ result = cyhal_wdt_init(&wdt_obj, cyhal_wdt_get_max_timeout_ms()); CY_ASSERT(CY_RSLT_SUCCESS == result); cyhal_wdt_free(&wdt_obj); #endif /* Initialize the device and board peripherals */ result = cybsp_init(); handle_error(result); /* Enable global interrupts */ __enable_irq(); /* Initialize the retarget-io to use the debug UART port */ result = cy_retarget_io_init(CYBSP_DEBUG_UART_TX, CYBSP_DEBUG_UART_RX, CY_RETARGET_IO_BAUDRATE); handle_error(result); /* \x1b[2J\x1b[;H - ANSI ESC sequence for clear screen */ printf("\x1b[2J\x1b[;H"); printf("****************** " "HAL: PWM square wave " "****************** \r\n\n"); /* In this example, PWM output is routed to the user LED on the kit. See HAL API Reference document for API details. */ /* Initialize the PWM */ result = cyhal_pwm_init(&pwm_led_control, CYBSP_USER_LED, NULL); check_status("API cyhal_pwm_init failed with error code", result); /* Set the PWM output frequency and duty cycle */ result = cyhal_pwm_set_duty_cycle(&pwm_led_control, PWM_DUTY_CYCLE, PWM_FREQUENCY); check_status("API cyhal_pwm_set_duty_cycle failed with error code", result); /* Start the PWM */ result = cyhal_pwm_start(&pwm_led_control); check_status("API cyhal_pwm_start failed with error code", result); printf("PWM started successfully. Entering the sleep mode...\r\n"); for (;;) { /* Put the CPU into sleep mode to save power */ cyhal_syspm_sleep(); } }
5.png (443.32 KB )
。
---------------------
作者:abner_ma
链接:https://bbs.21ic.com/icview-3391222-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









