



题目:
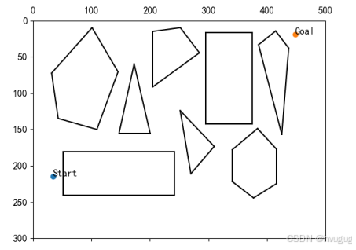
地图中存在一些凸多边形障碍物,设计算法寻求机器人从Start点到Goal点的最短路径。
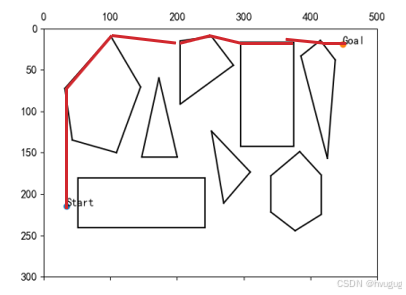
因为没有障碍时,机器人走直线,所以
1: 机器人的路径由一系列的折线构成
2: 路径将是(start, 某障碍点1, 某障碍点2,…, goal)
3: 因为不能穿过障碍,一定要转弯,因此路径上的障碍点,一定在障碍物的顶点上,如:
所以建图模型:
V =(start, 所有障碍物顶点,goal)
E = (所有的v之间的连线 减去 穿过障碍物的线)
应用A星算法最短路算法。
相关知识
建立图模型时,判断线段是否是否穿过障碍物,这是计算几何的问题,我们直接可实现一个Tools类,能够定义点、线段、多边形,能够计算线段的长度,判断线段和线段之间、线段和多边形之间是否相交。在本项目中,我们给出了所有顶点的坐标,提供了Tools的实现,并且建立好了图模型。
其次,A星算法针对一个问题模型建立搜索树结点完成,因此我们提供了问题模型的类实现problem类,可以给出一个状态下的可选择行为,以及一个行为下的状态变化结果。实际上它是图模型换一种表述。我们还给出node类,负责结点生成,计算结点的启发信息,建立结点间的树结构。
你的任务是基于上面两个类。在右侧的代码中完成A星算法函数 Astar(problem)。
测试说明
平台会对你编写的代码进行测试,Goal的坐标已经固定,程序会输入Start点的坐标,两个实数用空格分隔:
测试输入:34.1 113
预期输出:481.7586
实际上因为实数运算,你的输出跟预期有小的误差也会接受。
示例实现代码:
import math
from queue import Queue,PriorityQueue
import Tools
import numpy as np
import matplotlib.pyplot as plt
class Problem():
def __init__(self,points,Adj,start, goal):
self.Adj=Adj #`记录邻接矩阵备用`
self.Points=points #`记录每个顶点坐标备用`
self.InitialState=start #`起始状态`
self.GoalState=goal #`目标状态`
def GoalTest(self,state): #`测试是否到达目标`
return state==self.GoalState
def Action(self,state): #`获取某状态下的行为集合(邻点)`
n=len(self.Adj)
res=[i for i in range(n)
if Adj[i][state]<MAX and Adj[i][state]>0]
return res
def Result(self,state, action): #`在某状态下某行为后的新状态`
return action #`邻点既表示行为,也表示新状态`
def StepCost(self,state,action): #`在某状态下某行为需要的费用`
return self.Adj[state][action]
class Node():
def __init__(self,problem, parent=None,action=None):
#`定义由父亲结点parent通过行为action生成的子结点`
if parent == None: #`起始结点`
self.State=problem.InitialState
self.Parent=None
self.Action=None
self.PathCost=0
else:
self.State=problem.Result(parent.State,action)
self.Parent=parent #`记录此结点的父亲结点`
self.Action=action #`记录生成此结点的行为`
self.PathCost=parent.PathCost+problem.StepCost(\
parent.State,action)#`到此结点路径总费用`
self.g=self.PathCost #`g信息`
self.h=Tools.distance( #`h信息`
problem.Points[self.State],
problem.Points[problem.GoalState])
self.f=self.g+self.h #`f信息`
def __lt__(self, other):
return other.f > self.f #`符号重载,用于优先队列对结点排序`
def Solution(node):
s=[node.State]
while (node.Parent!=None):
s.insert(0, node.Parent.State)
node=node.Parent
return s
############################################3###
#请实现A*算法,并返回最短路径长度,
def Astar(problem):
# 创建一个优先队列,用于存储待探索的节点
frontier = PriorityQueue()
# 创建一个集合,用于存储已经探索过的节点,避免重复探索
explored = set()
# 初始化起始节点
start_node = Node(problem)
frontier.put(start_node)
# 当优先队列不为空时继续搜索
while not frontier.empty():
# 从优先队列中取出f值最小的节点
current_node = frontier.get()
# 如果已经探索过这个节点,则跳过
if current_node.State in explored:
continue
# 将当前节点标记为已探索
explored.add(current_node.State)
# 如果到达目标状态,则返回路径
if problem.GoalTest(current_node.State):
return Solution(current_node), current_node.PathCost
# 获取当前节点的所有可能行为(邻点)
actions = problem.Action(current_node.State)
# 对每个行为生成新的节点,并将其加入优先队列
for action in actions:
child_node = Node(problem, current_node, action)
# 如果新节点未被探索过,则加入优先队列
if child_node.State not in explored:
frontier.put(child_node)
# 如果没有找到路径,则返回None和无穷大
return None, float('inf')
################################################
if __name__ == '__main__':
MAX=100000
n=35
x, y = map(float, input().strip().split())
s = Tools.Point(x, y, 's')
a1 = Tools.Point(51.5, 180.5, "a1")
a2 = Tools.Point(51.5,240.5, "a2")
a3 = Tools.Point(242,240.5, "a3")
a4 = Tools.Point(242,180.5, "a4")
b1 = Tools.Point(101,9.8, "b1")
b2 = Tools.Point(31.8,72.4, "b2")
b3 = Tools.Point(43,134.8, "b3")
b4 = Tools.Point(109.2,150, "b4")
b5 = Tools.Point(145.4,70.6, "b5")
c1 = Tools.Point(172.9,59.8, "c1")
c2 = Tools.Point(147.1,155.4, "c2")
c3 = Tools.Point(200.4,155.4, "c3")
d1 = Tools.Point(204.8,15, "d1")
d2 = Tools.Point(204.8,91.4, "d2")
d3 = Tools.Point(284.6,44.4, "d3")
d4 = Tools.Point(251.9,9.8, "d4")
e1 = Tools.Point(251.7,124, "e1")
e2 = Tools.Point(270,211, "e2")
e3 = Tools.Point(309.9,173.4, "e3")
f1 = Tools.Point(295.6,16.4, "f1")
f2 = Tools.Point(375.5,16.4, "f2")
f3 = Tools.Point(375.5,142.5, "f3")
f4 = Tools.Point(295.6,142.5, "f4")
h1 = Tools.Point(415,14.4, "h1")
h2 = Tools.Point(385.8,33.3, "h2")
h3 = Tools.Point(425.5,156.9, "h3")
h4 = Tools.Point(437.3,37.9, "h4")
i1 = Tools.Point(384,148.7, "i1")
i2 = Tools.Point(340.7,178, "i2")
i3 = Tools.Point(340.7,221.7, "i3")
i4 = Tools.Point(377.2,244.3, "i4")
i5 = Tools.Point(416.3,224.7, "i5")
i6 = Tools.Point(416.3,177, "i6")
g = Tools.Point(448.4,19, "g")
shapeA = [a1,a2,a3,a4]
shapeB = [b1,b2,b3,b4,b5]
shapeC = [c1,c2,c3]
shapeD = [d1,d2,d3,d4]
shapeE = [e1,e2,e3]
shapeF = [f1,f2,f3,f4]
shapeH = [h1,h2,h3,h4]
shapeI = [i1,i2,i3,i4,i5,i6]
shapeAll = [shapeA,shapeB,shapeC,shapeD,shapeE,shapeF,shapeH,shapeI]
points = [s,
a1,a2,a3,a4,
b1,b2,b3,b4,b5,
c1,c2,c3,
d1,d2,d3,d4,
e1,e2,e3,
f1,f2,f3,f4,
h1,h2,h3,h4,
i1,i2,i3,i4,i5,i6,
g]
def getArrary():
n=len(points)
a = np.zeros([n,n])
for i in range(0,n):
for j in range(i,n):
l = Tools.Line(points[i],points[j])
a[i,j] = Tools.distance(points[i],points[j])
for shape in shapeAll:
if Tools.shapeInteresect(l,shape) is True:
a[i,j] = MAX
a[j,i]=a[i,j]
return a
Adj=getArrary()
p=Problem(points,Adj, 0,34)
L=Astar(p)
print(L[1])

















 2788
2788

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









