




 本文介绍了纯跟踪控制算法(Pure Pursuit),一种用于车辆横向控制的方法,具有良好的外界鲁棒性。算法基于车辆后轮中心点和预瞄点之间的几何关系来确定前轮转角。在三角形OAB中,预瞄点是根据预瞄距离和转弯半径确定的,确保车辆能沿特定路径行驶。内容来源于b站ALLY前辈的分享。
本文介绍了纯跟踪控制算法(Pure Pursuit),一种用于车辆横向控制的方法,具有良好的外界鲁棒性。算法基于车辆后轮中心点和预瞄点之间的几何关系来确定前轮转角。在三角形OAB中,预瞄点是根据预瞄距离和转弯半径确定的,确保车辆能沿特定路径行驶。内容来源于b站ALLY前辈的分享。
一、定义及概论
纯跟踪控制算法(Pure Pursuit)是一种典型的横向控制方法,最早由 R. Wallace 在1985年提出,该方法对外界的鲁棒性较好。
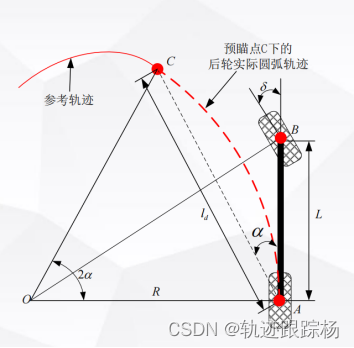
该算法的思想:基于当前车辆后轮中心位置,在参考路径上向ld(自定义)的距离匹配一个预瞄点,假设车辆后轮中心点可以按照一定的转弯半径行驶抵达该预瞄点,然后根据预瞄距离ld,转弯半径R,车辆坐标系下预瞄点的朝向角2之间的几何关系来确定前轮转角。
二、算法推导
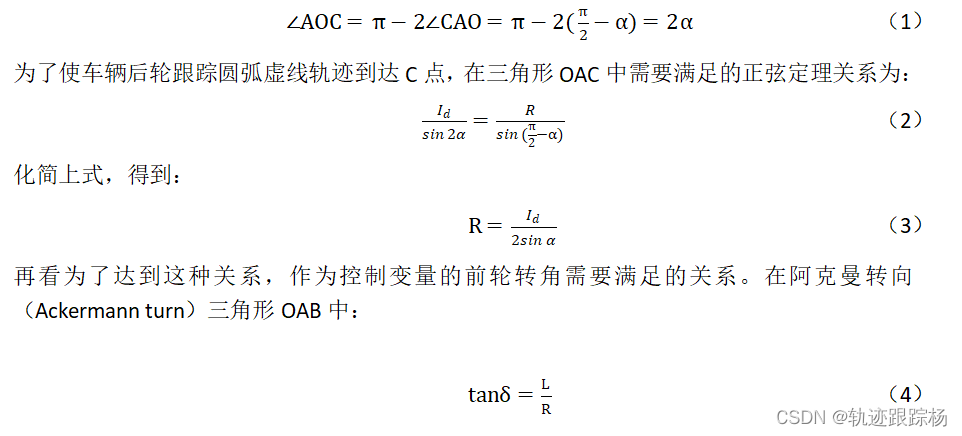
在三角形OAB中,由于车辆后轮中心点A可以按照一定的转弯半径R行驶抵达该预瞄点,OA为车辆后轮中心点A到拐弯圆中心的连线,AB为这一时刻的车辆运动方向,因而AB⊥AO。
 特此声明:仅为学习记录来源于b站ALLY前辈,推荐!!
特此声明:仅为学习记录来源于b站ALLY前辈,推荐!!

















 2155
2155

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









