



用于手持式动力手术工具的两自由度柔性工具尖端设计
1 引言
微创手术(MIS)中使用的传统腹腔镜器械(如持针器和抓取器)具有空心刚性轴,工具的近端部分设有手柄,工具的远端设有一对抓取器。驱动器械抓取器的驱动力由外科医生提供。为外科医生施加的操作力提供动力辅助可减少手部疲劳。动力手术工具还可在移动平台上实现远程手术系统[1]。一种知名的 commercially available 动力腹腔镜手术器械是 Endocontrol 的 Jaimy TM from Endocontrol[2]。可向手术器械增加额外的自由度(DOF),以提高工具在手术区域内的灵活性[3]。通过使用动力手术工具,还可通过对某些自由度进行运动缩放来实现震颤补偿[4]。
在手术工具中使用柔性机构具有许多优点,例如无关节设计和无需润滑[5]。本文提出一种带有可处置一次性使用柔性工具尖端的动力手术工具设计。为实现带有柔性抓取器的可动工具头,本文提出了一种整体式设计(单件注塑成型)。该设计的前提是,为提高工具尖端灵活性所需的附加关节可被模制成单一结构。
2 工具尖端和工具设计
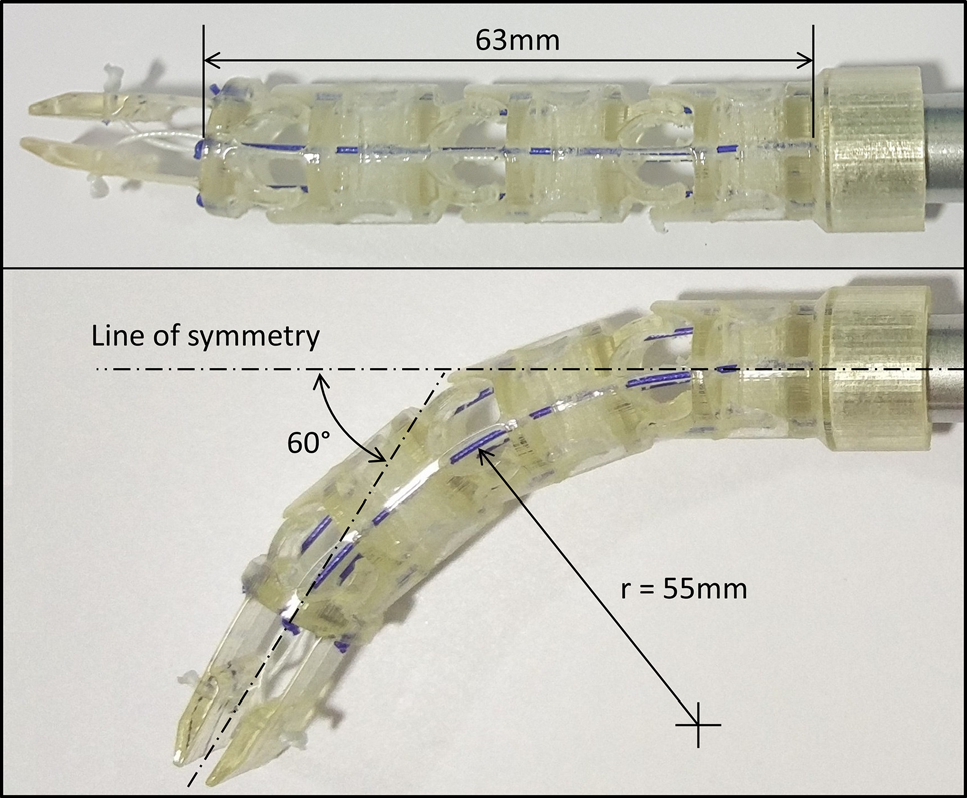
该工具尖端具有两个自由度(俯仰和偏航自由度),并且集成了抓取器作为其一部分,如图1所示。为了实现两个相互正交的自由度,工具尖端设计采用了交替布置的柔性梁(柔性关节),这些柔性梁相互正交[6]。总共采用六个以这种方式布置的柔性关节。每个关节设计为最大弯曲20度,并设有防止柔性铰链极端纤维屈服的弯曲限位。选用圆角过渡柔性铰链作为柔性关节,因其与圆形柔性铰链相比具有更低的应力和更高的柔顺性,正如洛邦提乌等人所述[7]。
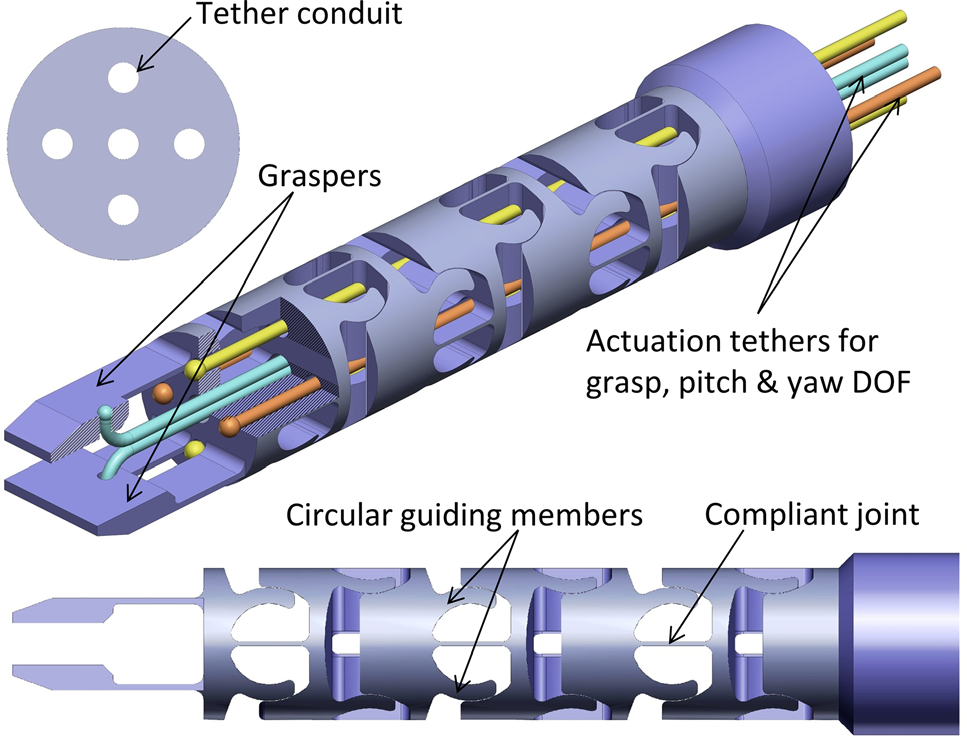
柔性抓手可以有多种驱动方式。弗雷克等人[8]采用管状结构来驱动抓手,而科塔等人[5]提出的方案则使用多个柔性构件来驱动抓手。本设计中工具尖端的抓取器通过连接至其上的两条牵引线施加的拉力进行驱动。该拉力使工具头结构承受压缩载荷。由于细长的柔性关节在工具头处于中立位置时抗屈曲承载能力有限,因此我们设置了圆形导向部件,以在抓取器被驱动时分担施加到柔性关节上的部分载荷。它们还确保柔性关节在压缩载荷下不会发生屈曲。这些额外的承力部件在柔性连杆弯曲时绕连杆中点旋转,并提供对剪切和扭转载荷的抵抗能力。圆形导向部件之间的间隙可通过注塑成型后的激光切割或水射流加工获得。带有柔性关节和柔性抓手的工具头设计如图1所示。柔性工具头内有五个导管,用于容纳从执行器延伸至工具尖端的牵引线。图1左上角展示了工具头的横截面。位于工具头外围的四个导管相互呈90度布置,用于容纳驱动俯仰和偏航自由度的牵引线。如图1所示,抓手部分移除了四分之一截面,以展示牵引线在导管中的走线路径。通过差动运动学,牵引线可实现工具头的俯仰和偏航运动。中心导管容纳一对用于驱动抓取器的牵引线。
一个中空刚性轴容纳全部三对动力传输系绳。牵引线直径为0.7毫米,由多股尼龙制成。牵引线构成闭合回路并形成正向驱动,因此不会打滑。
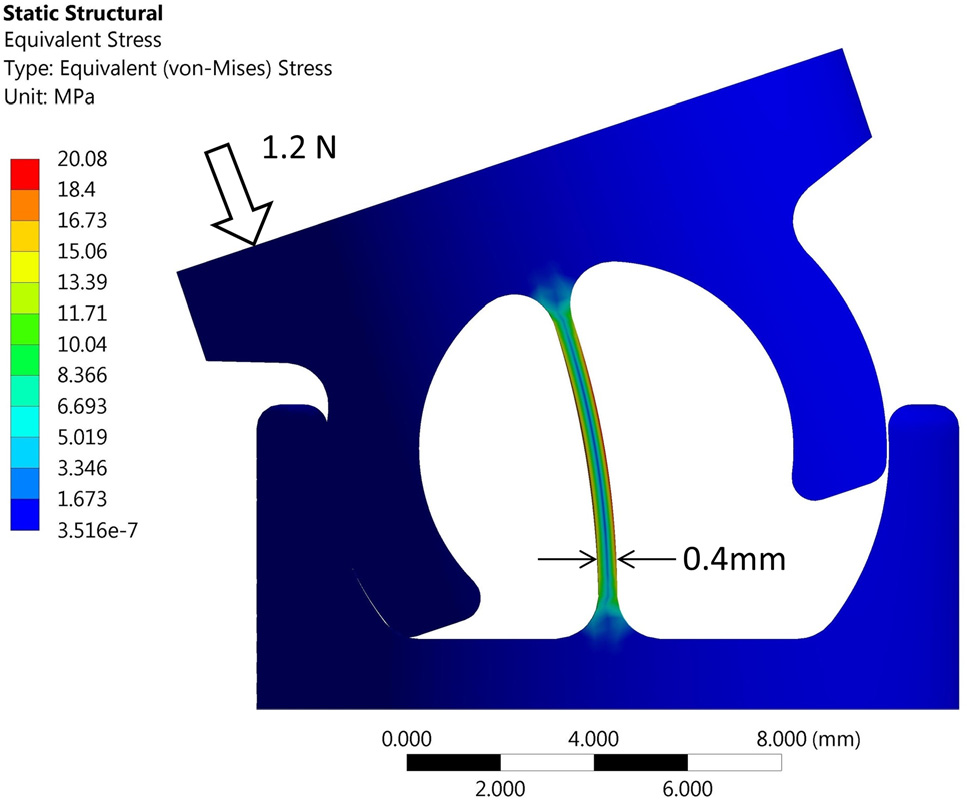
本文采用有限元建模来设计工具尖端,因为文献中现有的柔性铰链设计方程仅适用于具有均匀横截面的设计。[7]所提出的结构在柔性部件中设有导管,导致某些区域的横截面不连续。此外,由于圆形导向部件之间存在接触摩擦,现有设计方程无法直接使用。经过多次迭代并尝试圆形导向部件之间的不同间隙后,最终在打印后将圆形导轨之间的间隙设定为200μm。间隙小于此值会导致粘滞关节。为了确保增加关节柔韧性,有必要使关节的截面惯性矩最小化[9]。这可以通过将关节厚度保持尽可能薄来实现。考虑到3D打印机的限制,厚度固定为0.4毫米。关节宽度根据工具直径确定,并固定为15毫米。使用商业有限元分析(FEA)软件对柔性连杆的一个关节进行了非线性静态结构分析(开启大变形模式)。共使用90,333个四面体单元对模型进行网格划分。打印树脂的材料属性设定为各向同性且线性,弹性模量为2870兆帕[10]。计算得到的最大冯·米塞斯应力为20兆帕,在施加力为1.2牛顿作用于导线末端时,低于打印树脂的抗弯强度(75兆帕)[10]。图2显示了关节在其极限位置时的弯曲状态。另一次有限元分析仿真针对不同的关节间隙进行,结果表明当间隙大于0.1毫米时,圆形导向部件对驱动缆线力无影响。这是因为柔性部件的轴偏移约为0.1毫米。
整个工具尖端使用Objet PolyJet打印机采用FullCure VR 720光敏树脂进行3D打印。该光敏树脂在圆形导向部件的接触面之间的摩擦系数通过实验确定为0.34,并且在所有有限元分析仿真中也对接触进行了建模。图3显示了组装好的原型,可以看出执行器和控制器被远程放置在工具远端的驱动盒中。
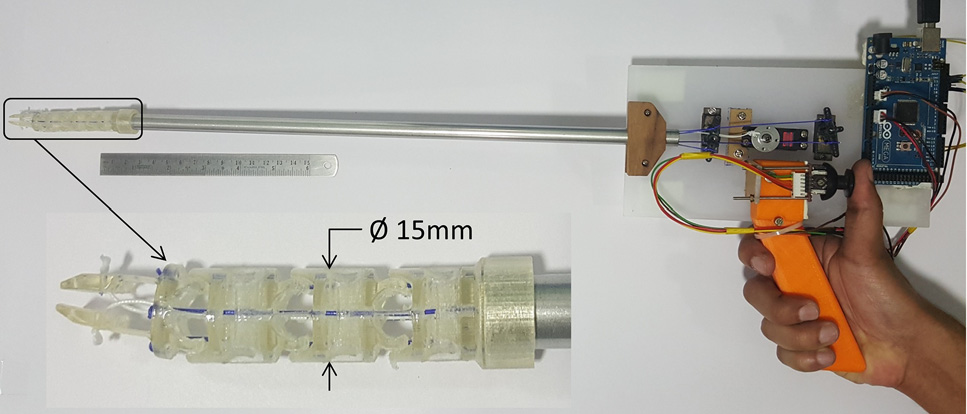
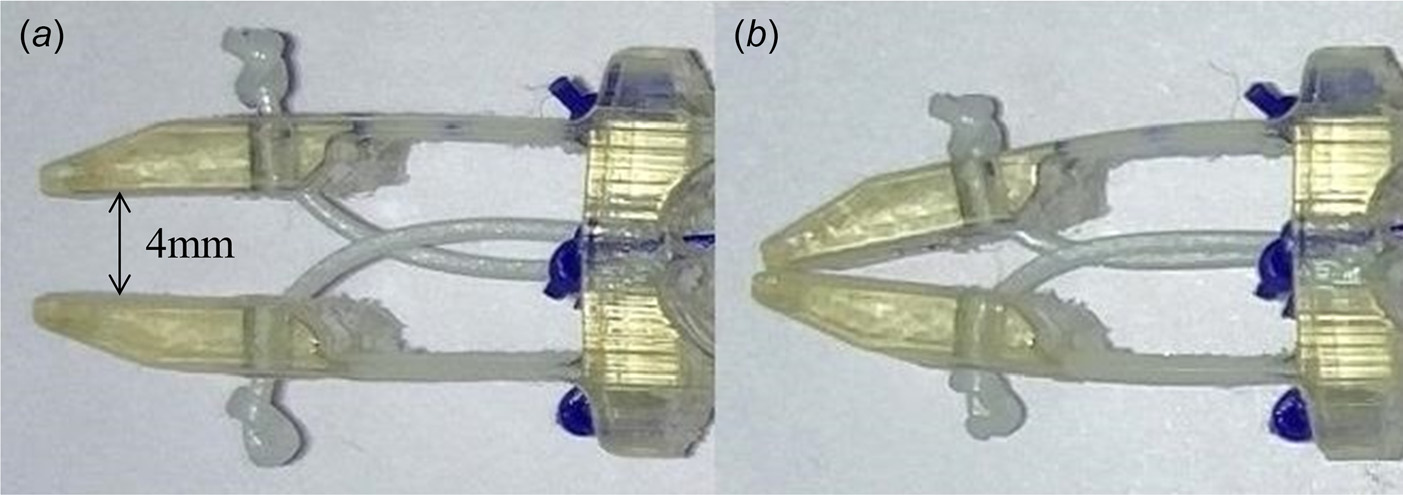
拇指操纵杆符合人体工程学地放置在用于握持工具的枪柄式手柄上方。该操纵杆可进行偏航和俯仰,以适当地控制工具尖端。来自操纵杆的模拟位置数据被输送至微控制器(Arduino),该微控制器将操纵杆的位置数据映射到连接至柔性关节的伺服执行器的位置。该系统为开环,无外部反馈,尽管伺服电机自身具有内部位置反馈以维持给定的角方位。图4显示了抓取器处于中性及闭合位置。图5显示了工具尖端处于中性及完全弯曲(俯仰自由度)位置。
3 测试
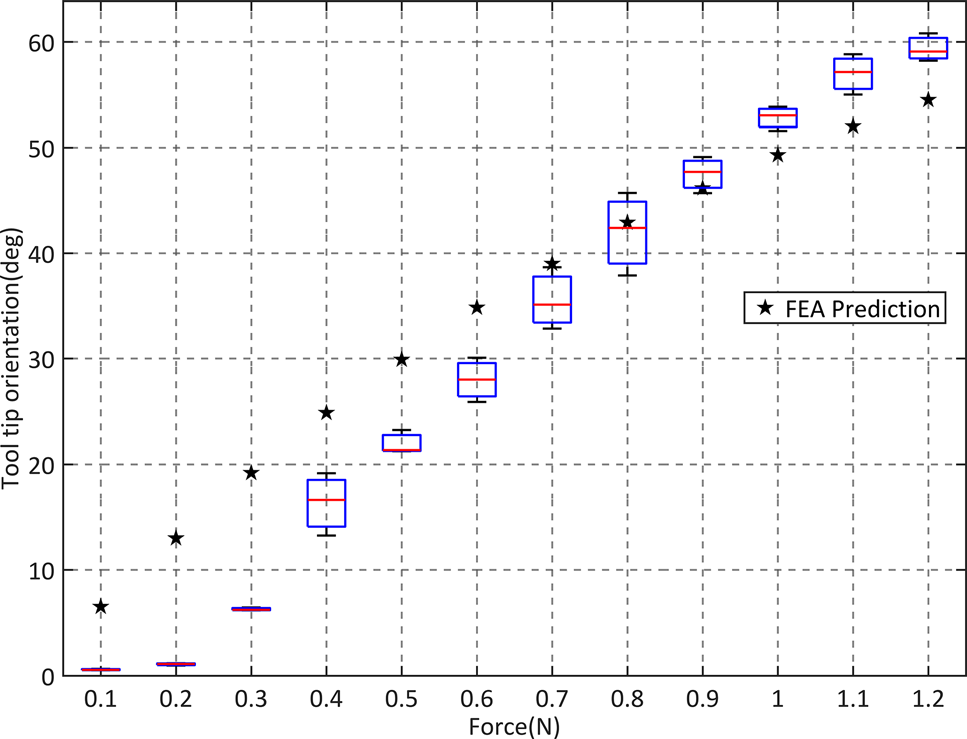
当弯曲时,工具尖端的柔性关节会储存势能。这种储存的能量需要施加的外力来维持特定的关节角度,这与传统关节不同。因此,由柔性关节和抓取器构成的手术工具尖端可能需要一个外部机制来实现静态平衡,类似于Aguirre等人提出的机制。[11]为了确定驱动绳施加的力与工具尖端方向在工具运动范围内的关系,使用独立的测试装置进行了测试。经过10次试验后,利用同一工具尖端测量的工具尖端方向与施加用于俯仰或偏航的力之间的趋势以箱线图形式显示在图6中,并且从第一次到最后一次测试未观察到性能的显著变化。工具尖端方向是从工具的对称线测量的。工具尖端偏转的有限元分析仿真结果叠加在图6上。
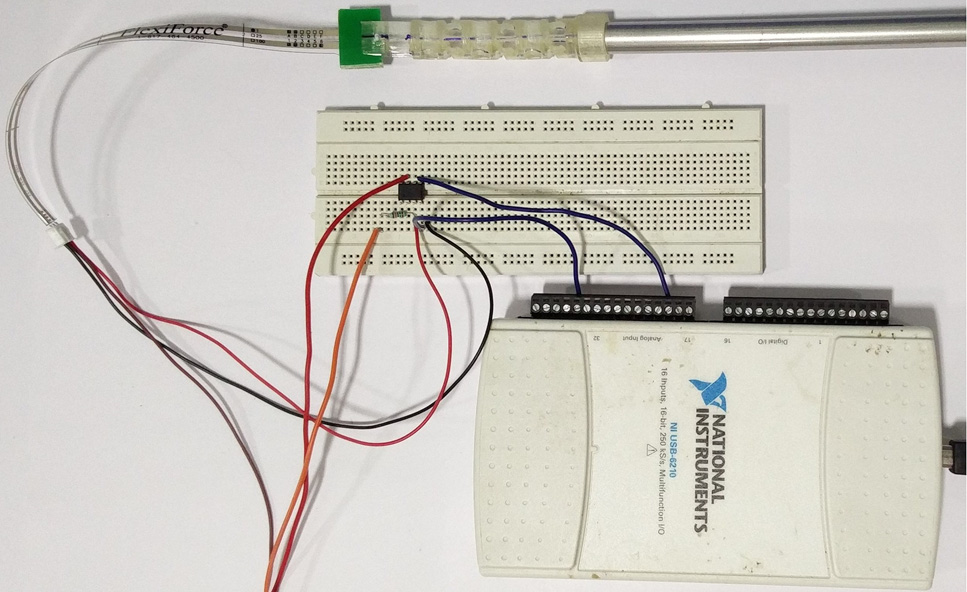
戈伊苏埃塔等人[12]所描述的类似第二次测试被用于评估柔性抓手可施加的夹持力。在抓取器之间放置了一个经过校准的压阻式力传感器(FlexiForceVR力传感器—型号A201),并进行夹紧。根据制造商的建议,该传感器被夹在两张平面薄片(图中显示为绿色)之间,薄片具有凸起表面,仅与传感器的感应区域接触,以实现从抓取器到传感器的最佳力传递,如图7所示。使用运算放大器(OP07)对传感器输出信号进行放大,然后通过数据采集系统(NI USB‐6210 数据采集设备)进行数字化。绘制了传感器电导与施加力之间的关系图,作为传感器的校准曲线。通过放大器输出的电压读数来获取传感器的电导值。通过对同一工具尖端进行15次试验,发现柔性抓手能够施加的最大记录夹紧力为0.3牛,且未观察到性能变化。对抓取器夹持力的有限元分析(FEA)仿真估计,在牵引线上需要施加0.83牛的驱动作用力,才能使抓取器产生0.3牛的夹持力。
4 结果
测试表明,使工具尖端弯曲至60度(工具的设计极限)所需的最大力约为1.2牛。由于发现使执行器旋转所需的反向驱动力远大于1.2牛,因此无需使用独立机构来平衡柔性关节。这归因于电机与工具尖端之间较大的齿轮减速比。图6中实验值与有限元分析仿真在工具尖端较低和较高方向上的偏差,可通过在分析中采用树脂本构模型进一步减小。
5 结论和进一步工作
该原型验证了柔性机构作为微创手术中传统机构替代方案的实用性。所提出的整体式设计便于将抓取器与柔性关节集成,从而简化了驱动机构。关于工具尖端设计的进一步工作包括实现其可拆卸和易于更换,同时正在改进抓取器的张开角度。可为操作抓取器的牵引线提供独立的护套,且不影响关节刚度。该护套将作为牵引线的包层,并使施加到抓取器上的轴向载荷保持在靠近工具尖端对称平面的位置,从而防止可能导致工具尖端弯曲的轻微偏移。

















 67
67

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









