




视频讲解
第1季:第12章_典型自主导航系统
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------

添加图片注释,不超过 140 字(可选)
本书内容安排

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
12.1 ros-navigation导航系统
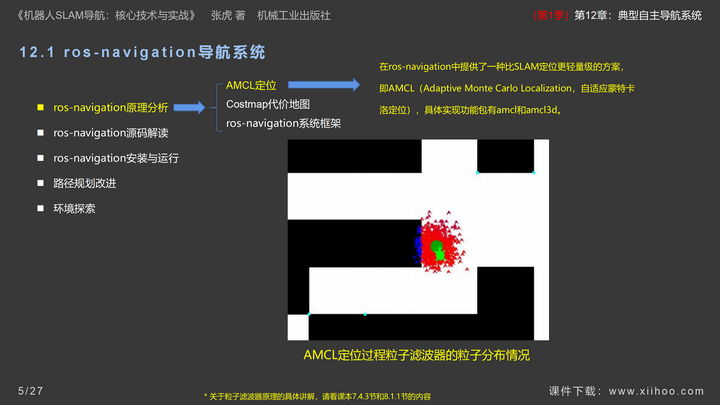
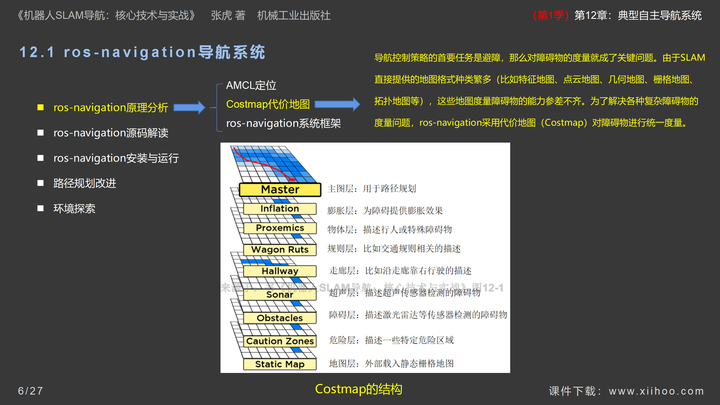
①ros-navigation原理分析
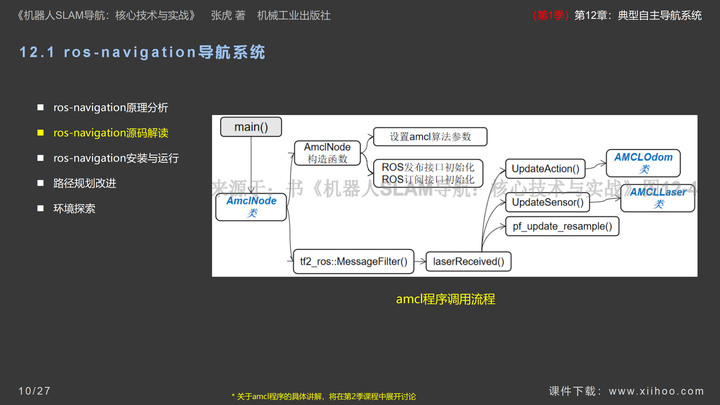
②ros-navigation源码解读
③ros-navigation安装与运行
④路径规划改进
⑤环境探索

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
12.2 riskrrt导航系统
对于大多数ROS学习者,最先接触到的导航系统基本都是ros-navigation。不过机器人领域的导航系统实现并不只有ros-navigation,这里要介绍的riskrrt就是另外一种导航系统实现。
riskrrt的系统框架基本与ros-navigation一样,也就是地图供应、全局定位和路径规划这些主要模块。
riskrrt的特别之处体现在对动态障碍物的处理更加严格,在走廊、机场、路口等人流量大的场景中对机器人与动态障碍物发生碰撞的风险把控更加严格,这种对动态障碍物碰撞的风险把控通过基于风险的RRT全局路径规划实现。

添加图片注释,不超过 140 字(可选)
12.3 autoware导航系统
ros-navigation和riskrrt导航系统主要都是用于机器人的低速导航,并且大多基于2D地图。
而autoware导航系统主要用于无人驾驶汽车的高速导航,并且基于3D地图。
除了所导航速度高一点和采用3D地图外,autoware的原理几乎与ros-navigation一样。

添加图片注释,不超过 140 字(可选)
12.4 导航系统面临的一些挑战
立体障碍物是机器人导航中很头疼的一个问题,因为2D激光雷达只能扫描某个平面内的障碍物,对于高于或低于扫描平面的障碍物是无法探测的。比如一个很矮的扫地机器人能从桌子底下穿过去,而在扫地机器人上安装一个较高的货架后就会导致碰撞。很自然会想到在机器人不同高度不同方向都装上传感器,这样就能避免因个别传感器探测盲区而发生碰撞了。但将机器人的全身都覆盖上传感器显然不现实,并且传感器本身也有探测距离和视角的盲区问题。
玻璃类型的透明障碍物、镜面反射障碍物、场景多径效应、强光烟雾干扰等因素,都会导致激光雷达或相机的探测失灵。在这种情况下,如何保证机器人的安全也是个棘手的问题。另外一些特殊的情况,比如机器人在下斜坡时地面如何从障碍描述中分离也是个问题。
还有就是路径规划和轨迹跟踪都强依赖于全局定位,当机器人全局定位丢失后,路径规划和轨迹跟踪将直接奔溃,那么导航系统的稳定性怎么保证也是个大问题。

添加图片注释,不超过 140 字(可选)
例程源码下载
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation

















 2076
2076

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









