



 本文介绍了一个使用C语言编写的8051单片机程序,通过P2_0和P2_7控制马达的转动方向。马达根据这两个引脚的高低电平状态实现顺/逆时针旋转,速度由NominalVoltage和NominalRevs参数决定。
本文介绍了一个使用C语言编写的8051单片机程序,通过P2_0和P2_7控制马达的转动方向。马达根据这两个引脚的高低电平状态实现顺/逆时针旋转,速度由NominalVoltage和NominalRevs参数决定。
代码:
#include "reg51.h"
sbit P2_0 = P2^0;
sbit P2_7 = P2^7;
void main(){
while(1){
P2_0 = 1;
P2_7 = 0;
}
}
仿真:
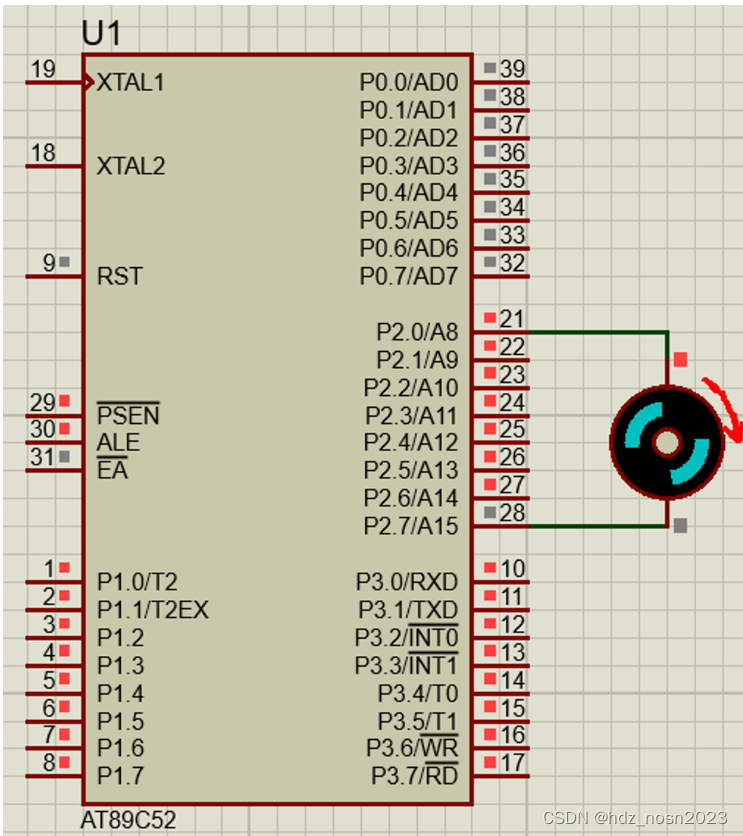
介绍:
当2.0和2.7端口均为低电平或高电平时,马达保持不转动;
当2.0和2.7端口分别为高电平和低电平时,马达顺时针转动;
当2.0和2.7端口分别为低电平和高电平时,马达逆时针转动。
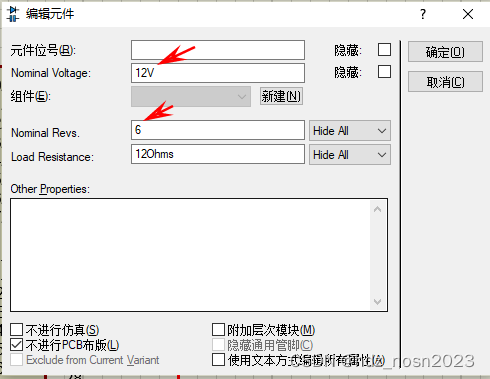
Nominal Voltage为正常电压,默认为12V,越小转速越快,越大转速越慢。
Nominal Revs为正常转速,默认为6,越大转速越快,越小转速越慢。


















 4389
4389

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









