



第二章 数据结构
问题1:链表所表示的元素是否有序?如有序,则有序性体现于何处?链表所表示的元素是否一定要在物理上是相邻的?有序表的有序性又如何理解?
答:
链表是一种常见的数据结构,用于存储一系列元素。链表中的元素可以是有序的,也可以是无序的,这取决于链表的类型和用途。下面是对您问题的一些解答:
- 链表所表示的元素是否有序?
- 这取决于链表的类型。链表可以分为单链表、双链表、循环链表等,它们可以是有序的也可以是无序的。例如,一个单链表可以表示一个有序序列,其中每个节点包含数据和指向下一个节点的指针。
- 如有序,则有序性体现于何处?
- 如果链表是有序的,那么有序性通常体现在元素的排列顺序上。在有序链表中,元素按照某种顺序(如升序或降序)排列,并且每个节点的后继节点在顺序上是连续的。
- 链表所表示的元素是否一定要在物理上是相邻的?
- 不一定。链表中的元素在物理上不需要是相邻的。链表是一种逻辑上连续的数据结构,每个元素(节点)包含数据和指向下一个元素的指针。这意味着即使在物理存储上元素是分散的,它们也可以通过指针逻辑上连接起来。
- 有序表的有序性如何理解?
- 有序表的有序性是指表中元素的排列顺序遵循某种规则或标准。例如,在有序数组中,元素可能是按照数值大小排序的;在有序链表中,元素可能按照某种顺序链接起来。有序表的有序性允许我们进行更高效的搜索、插入和删除操作,因为我们可以利用元素的顺序来减少不必要的比较和操作。
问题2:设顺序表L是递增有序表,试写一算法,将 x插入到L中并使L仍是递增有序表。
#include <stdio.h>
#define MAX_SIZE 100 // 定义顺序表的最大长度
// 顺序表结构
typedef struct {
int data[MAX_SIZE]; // 存储空间
int length; // 当前长度
} SeqList;
// 插入元素的函数
int Insert(SeqList *L, int x) {
int i, j;
// 寻找插入位置
for (i = 0; i < L->length; i++) {
if (L->data[i] > x) {
break;
}
}
// 元素后移,为新元素腾出空间
for (j = L->length; j > i; j--) {
L->data[j] = L->data[j - 1];
}
// 插入新元素
L->data[i] = x;
// 顺序表长度加1
L->length++;
return 0;
}
// 打印顺序表的函数
void PrintList(SeqList L) {
for (int i = 0; i < L.length; i++) {
printf("%d ", L.data[i]);
}
printf("\n");
}
int main() {
SeqList L;
L.length = 0; // 初始化顺序表长度为0
// 假设顺序表L已经有一些元素,这里我们手动添加一些
Insert(&L, 1);
Insert(&L, 3);
Insert(&L, 5);
Insert(&L, 7);
printf("Original list: ");
PrintList(L);
int x = 4; // 要插入的元素
Insert(&L, x);
printf("List after inserting %d: ", x);
PrintList(L);
return 0;
}
这个程序首先定义了一个顺序表结构 SeqList,其中包含一个整数数组 data 用于存储元素,以及一个整数 length 用于记录当前顺序表的长度。Insert 函数用于将元素 x 插入到顺序表 L 中的正确位置,以保持顺序表的递增有序性。PrintList 函数用于打印顺序表中的所有元素。
在 main 函数中,我们初始化了一个顺序表 L,然后添加了一些元素,并打印了原始顺序表。接着,我们插入了一个新元素 x,并再次打印了插入新元素后的顺序表。
问题3:写一求单链表的结点数目ListLength(L)的算法。
#include <stdio.h>
#include <stdlib.h>
// 定义单链表的节点结构
typedef struct Node {
int data; // 节点数据
struct Node *next; // 指向下一个节点的指针
} Node;
// 计算单链表节点数目的函数
int ListLength(Node *L) {
int count = 0; // 节点计数器
Node *current = L; // 当前节点指针
// 遍历链表,直到当前节点为NULL
while (current != NULL) {
count++; // 增加节点计数
current = current->next; // 移动到下一个节点
}
return count; // 返回节点数目
}
// 创建新节点的函数
Node *CreateNode(int data) {
Node *newNode = (Node *)malloc(sizeof(Node)); // 分配新节点的内存
if (newNode == NULL) {
printf("Memory allocation failed.\n");
exit(1);
}
newNode->data = data; // 设置节点数据
newNode->next = NULL; // 设置指针为NULL
return newNode;
}
// 将新节点添加到链表末尾的函数
void AppendNode(Node **L, int data) {
Node *newNode = CreateNode(data); // 创建新节点
if (*L == NULL) {
*L = newNode; // 如果链表为空,新节点即为头节点
} else {
Node *current = *L; // 当前节点指针
while (current->next != NULL) {
current = current->next; // 移动到链表末尾
}
current->next = newNode; // 将新节点添加到末尾
}
}
// 打印链表的函数
void PrintList(Node *L) {
Node *current = L; // 当前节点指针
while (current != NULL) {
printf("%d ", current->data); // 打印节点数据
current = current->next; // 移动到下一个节点
}
printf("\n");
}
int main() {
Node *L = NULL; // 初始化链表为空
// 向链表中添加一些节点
AppendNode(&L, 1);
AppendNode(&L, 3);
AppendNode(&L, 5);
AppendNode(&L, 7);
printf("List: ");
PrintList(L);
int length = ListLength(L); // 计算链表长度
printf("List length: %d\n", length);
return 0;
}
这个程序首先定义了一个单链表的节点结构 Node,其中包含一个整数 data 和一个指向下一个节点的指针 next。ListLength 函数用于计算单链表的节点数目,它通过遍历链表并计数节点来实现。CreateNode 函数用于创建一个新的节点,AppendNode 函数用于将新节点添加到链表的末尾,PrintList 函数用于打印链表中的所有节点。
在 main 函数中,我们初始化了一个空链表 L,然后向其中添加了一些节点,并打印了链表。接着,我们调用 ListLength 函数计算了链表的长度,并打印了结果。
问题4:写一算法将单链表中值重复的结点删除, 使所得的结果链表中所有结点的值均不相同。
#include <stdio.h>
#include <stdlib.h>
typedef struct Node {
int data;
struct Node* next;
} Node;
// 创建新节点的函数
Node* CreateNode(int data) {
Node* newNode = (Node*)malloc(sizeof(Node));
if (newNode == NULL) {
printf("Memory allocation failed.\n");
exit(1);
}
newNode->data = data;
newNode->next = NULL;
return newNode;
}
// 打印链表的函数
void PrintList(Node* L) {
Node* current = L; // 初始化current为L
while (current != NULL) {
printf("%d ", current->data);
current = current->next;
}
printf("\n");
}
// 删除重复节点的函数
void RemoveDuplicates(Node** L) {
if (*L == NULL) {
return; // 如果链表为空,不需要删除
}
Node* current = *L;
while (current != NULL && current->next != NULL) {
if (current->data == current->next->data) {
Node* temp = current->next; // 保存要删除的节点
current->next = current->next->next; // 从链表中移除重复节点
free(temp); // 释放节点内存
}
else {
current = current->next; // 移动到下一个节点
}
}
}
int main() {
Node* L = NULL; // 初始化链表为空
// 向链表中添加一些节点,包括重复的值
L = CreateNode(1);
L->next = CreateNode(2);
L->next->next = CreateNode(2);
L->next->next->next = CreateNode(3);
L->next->next->next->next = CreateNode(4);
printf("Original list: ");
PrintList(L);
RemoveDuplicates(&L); // 删除重复节点
printf("List after removing duplicates: ");
PrintList(L);
return 0;
}
下面是对代码中每个函数的简析:
-
CreateNode函数:- 这个函数用于创建一个新的链表节点。
- 它接受一个整数
data作为参数,分配一个新的节点,并将其数据域设置为data。 - 如果内存分配失败,它会打印一条错误消息并退出程序。
- 成功创建的节点的
next指针被初始化为NULL。
-
PrintList函数:- 这个函数用于打印链表中的所有节点数据。
- 它通过一个指针
current遍历链表,从链表的头节点开始,直到current为NULL。 - 每次迭代都会打印当前节点的数据,然后移动到下一个节点。
-
RemoveDuplicates函数:- 这个函数用于删除链表中值重复的节点。
- 它首先检查链表是否为空,如果为空,则直接返回。
- 然后,它使用一个指针
current遍历链表,检查当前节点的值是否与其后继节点的值相同。 - 如果值相同,它会保存后继节点的地址到
temp,然后调整current的next指针以跳过重复的节点,并释放temp指向的节点内存。 - 如果值不相同,
current指针就会移动到下一个节点。
-
main函数:- 这是程序的入口点。
- 它首先初始化一个空链表
L。 - 然后,通过调用
CreateNode函数并链接新节点来构建链表,包括一些重复的值(例如,两个值为2的节点)。 - 使用
PrintList函数打印原始链表。 - 调用
RemoveDuplicates函数删除链表中的重复节点。 - 最后,再次使用
PrintList函数打印删除重复节点后的链表。
程序的输出将是原始链表和删除重复节点后的链表。然而,当前的 RemoveDuplicates 函数实现有一个问题:它只删除了相邻的重复节点。如果链表中有非相邻的重复节点,这个函数将无法删除它们。要删除所有重复的节点,需要一个更复杂的算法,例如使用一个哈希表来跟踪已经见过的值。
问题5:写一算法从一给定的向量A删除值在x到 y(x≤y)之间的所有元素(注意:x和y是给定 的参数,可以和表中的元素相同,也可以不同)
#include <stdio.h>
// 删除向量A中值在x到y之间的所有元素的函数
void RemoveElements(int A[], int size, int x, int y) {
int i, j = 0; // j用于跟踪新数组的索引
// 遍历数组
for (i = 0; i < size; i++) {
// 如果当前元素不在x到y的范围内,则将其保留
if (A[i] < x || A[i] > y) {
A[j++] = A[i]; // 将元素复制到新位置
}
}
// 将数组截断到新的长度
for (i = j; i < size; i++) {
A[i] = 0; // 或者其他适当的清理操作
}
}
// 打印数组的函数
void PrintArray(int A[], int size) {
for (int i = 0; i < size; i++) {
printf("%d ", A[i]);
}
printf("\n");
}
int main() {
int A[] = {1, 3, 5, 7, 9, 11, 13, 15};
int size = sizeof(A) / sizeof(A[0]);
int x = 6, y = 12;
printf("Original array: ");
PrintArray(A, size);
RemoveElements(A, size, x, y);
printf("Array after removal: ");
PrintArray(A, size);
return 0;
}
这个算法的工作原理如下:
- 使用两个索引
i和j,其中i用于遍历原始数组,j用于在新位置存储不在x到y范围内的元素。 - 当遇到不在
x到y范围内的元素时,将其复制到j指向的位置,并递增j。 - 遍历完成后,原始数组中
j之后的所有元素将被清零或进行其他适当的清理操作,以确保数组的其余部分不会包含无效数据。
请注意,这个算法假设数组 A 有足够的空间来存储所有不在 x 到 y 范围内的元素。如果数组可能需要动态调整大小,您可能需要使用动态内存分配。此外,如果数组中的元素是其他数据类型,您可能需要相应地调整比较操作。
问题6:设A和B是两个按元素值递增有序的单链表 ,写一算法将A和B归并为按按元素值递减有序的单链表C,试分析算法的时间复杂度。
#include <stdio.h>
#include <stdlib.h>
// 定义单链表的节点结构
typedef struct Node {
int data;
struct Node *next;
} Node;
// 创建新节点的函数
Node* CreateNode(int data) {
Node *newNode = (Node *)malloc(sizeof(Node));
if (newNode == NULL) {
printf("Memory allocation failed.\n");
exit(1);
}
newNode->data = data;
newNode->next = NULL;
return newNode;
}
// 向链表末尾添加节点的函数
void AppendNode(Node **L, int data) {
Node *newNode = CreateNode(data);
if (*L == NULL) {
*L = newNode;
} else {
Node *current = *L;
while (current->next != NULL) {
current = current->next;
}
current->next = newNode;
}
}
// 打印链表的函数
void PrintList(Node *L) {
Node *current = L;
while (current != NULL) {
printf("%d ", current->data);
current = current->next;
}
printf("\n");
}
// 归并两个递增有序链表为一个递减有序链表的函数
Node* MergeLists(Node *A, Node *B) {
Node dummy;
Node *tail = &dummy;
dummy.next = NULL;
while (A != NULL && B != NULL) {
if (A->data > B->data) {
tail->next = A;
A = A->next;
} else {
tail->next = B;
B = B->next;
}
tail = tail->next;
}
// 连接剩余的节点
if (A != NULL) {
tail->next = A;
} else {
tail->next = B;
}
// 反转链表
Node *prev = NULL, *current = dummy.next, *nextNode;
while (current != NULL) {
nextNode = current->next;
current->next = prev;
prev = current;
current = nextNode;
}
return prev;
}
int main() {
Node *A = NULL;
Node *B = NULL;
// 构建递增有序链表A
AppendNode(&A, 1);
AppendNode(&A, 3);
AppendNode(&A, 5);
// 构建递增有序链表B
AppendNode(&B, 2);
AppendNode(&B, 4);
AppendNode(&B, 6);
printf("List A: ");
PrintList(A);
printf("List B: ");
PrintList(B);
Node *C = MergeLists(A, B);
printf("Merged List C (in decreasing order): ");
PrintList(C);
return 0;
}
这个程序首先定义了一个单链表的节点结构 Node,然后提供了创建新节点、向链表末尾添加节点、打印链表和归并两个链表的函数。MergeLists 函数首先使用一个虚拟节点 dummy 来简化边界条件的处理,然后比较并连接两个链表的节点,最后反转链表以得到递减有序的结果。
在 main 函数中,我们构建了两个递增有序的链表A和B,然后调用 MergeLists 函数将它们归并为一个递减有序的链表C,并打印结果。
时间复杂度分析:
- 归并过程(MergeLists 函数)的时间复杂度是 O(n + m),其中 n 和 m 分别是链表 A 和 B 的长度。这是因为我们需要遍历两个链表中的每个节点一次。
- 反转链表的过程(ReverseList 函数)的时间复杂度是 O(k),其中 k 是链表 C 的长度。由于 k = n + m,所以反转操作的时间复杂度也是 O(n + m)。
第三章 图
问题1:
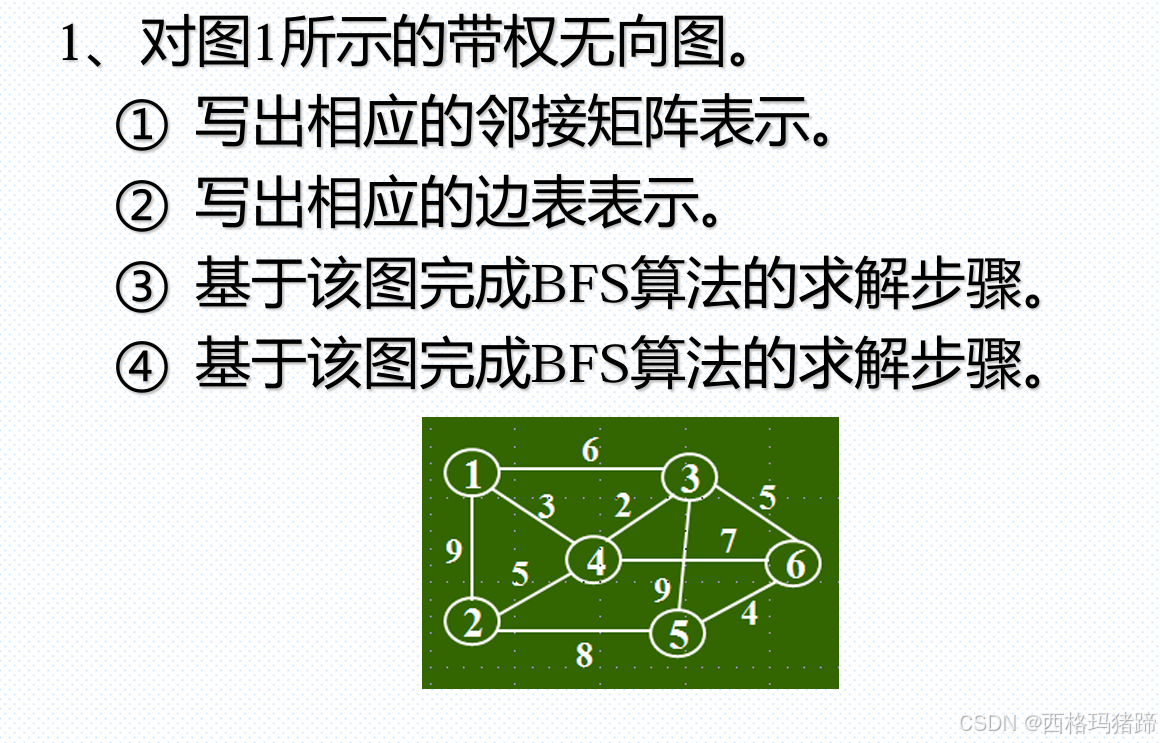
① 邻接矩阵表示
邻接矩阵是一个二维数组,用于表示图中顶点之间的连接关系。对于无向图,如果顶点 i 和顶点 j 之间有边,则矩阵的第 i 行第 j 列和第 j 行第 i 列的值是边的权重,否则为 0 或 ∞(表示不可达)。
对于给定的图,邻接矩阵如下(使用 ∞ 表示不可达):
1 2 3 4 5 6
1 [ 0, 9, 6, 3, ∞, ∞ ]
2 [ 9, 0, ∞, 5, 8, ∞ ]
3 [ 6, ∞, 0, 2, ∞, 5 ]
4 [ 3, 5, 2, 0, 9, 7 ]
5 [ ∞, 8, ∞, 9, 0, 4 ]
6 [ ∞, ∞, 5, 7, 4, 0 ]
② 边表表示
边表是一个列表,其中每个元素是一个边的描述,通常包括两个顶点和边的权重。对于给定的图,边表如下:
(1, 2, 9), (1, 3, 6), (1, 4, 3),
(2, 4, 5), (2, 5, 8),
(3, 4, 2), (3, 6, 5),
(4, 5, 9), (4, 6, 7)
③ 基于该图完成BFS算法的求解步骤
假设我们从顶点 1 开始进行广度优先搜索(BFS):
- 初始化队列 Q 和访问数组 visited,将 1 加入 Q,标记为 visited。
- 从 Q 中取出 1,访问其所有未访问的邻居(2, 3, 4),将它们加入 Q 并标记为 visited。
- 从 Q 中取出 2,访问其未访问的邻居(5),将 5 加入 Q 并标记为 visited。
- 从 Q 中取出 3,访问其未访问的邻居(6),将 6 加入 Q 并标记为 visited。
- 从 Q 中取出 4,没有未访问的邻居。
- 从 Q 中取出 5,没有未访问的邻居。
- 从 Q 中取出 6,没有未访问的邻居。
BFS 完成后的访问顺序为:1, 2, 3, 4, 5, 6。
④ 基于该图完成DFS算法的求解步骤
假设我们从顶点 1 开始进行深度优先搜索(DFS):
- 初始化栈 S 和访问数组 visited,将 1 压入 S,标记为 visited。
- 访问 1,将其所有未访问的邻居(2, 3, 4)压入 S 并标记为 visited。
- 访问 2,将其未访问的邻居(5)压入 S 并标记为 visited。
- 访问 5,将其未访问的邻居(6)压入 S 并标记为 visited。
- 访问 6,没有未访问的邻居,返回上一个节点。
- 返回到 5,没有其他未访问的邻居,返回上一个节点。
- 返回到 2,没有其他未访问的邻居,返回上一个节点。
- 返回到 1,访问其未访问的邻居(4),将 4 压入 S 并标记为 visited。
- 访问 4,没有未访问的邻居。
DFS 完成后的访问顺序可能为:1, 2, 5, 6, 4 或其他变体,具体取决于邻居的访问顺序。
问题2:
初始化:
- 设置V6到自身的最短距离为0,即dist[V6]=0dist[V6]=0。
- 对于所有其他顶点Vi,初始化dist[Vi]dist[Vi]为从V6到Vi的直接距离(如果存在直接边)或无穷大(如果没有直接边)。
- 创建一个未访问顶点的集合,初始包含所有顶点。
迭代过程:
重复以下步骤直到所有顶点都被访问:
- 从未访问顶点中选择具有最小dist值的顶点u。
- 标记u为已访问。
- 更新u的所有未访问邻居v的dist值:
dist[v]=min(dist[v],dist[u]+weight(u,v))
其中weight(u,v)是从u到v的边的权重。
应用到给定的图:
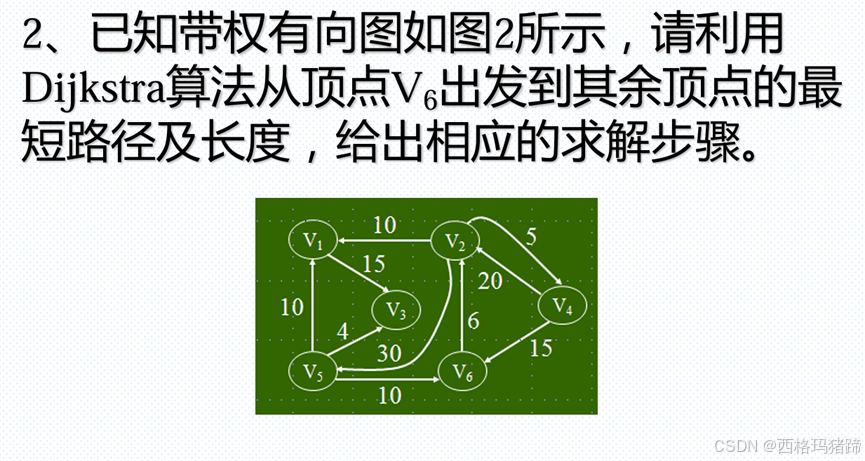
从 V6开始,我们有以下边和权重:
- V6到V2: 6
- V6到V4: 15
- V6到V5: 10
步骤 1: 初始化:
- dist[V6]=0
- dist[V1]=∞
- dist[V2]=6
- dist[V3]=∞
- dist[V4]=15
- dist[V5]=10
步骤 2: 迭代过程:
- 选择 V6V,更新邻居:
- dist[V2]=6 (已更新)
- dist[V4]=15 (已更新)
- dist[V5]=10 (已更新)
- 选择 V2(最小 dist),更新邻居:
- dist[V1]=16 (通过V2和边V1到V2的权重10)
- dist[V3]=26 (通过V2和边V3到V2的权重20)
- 选择 V5,更新邻居:
- dist[V1]=14 (通过V5和边V5到V1的权重4)
- 选择 V4,更新邻居:
- 没有更短的路径
- 选择 V1,更新邻居:
- dist[V3]=29(通过V1和边V1到V3的权重15)
- 最后选择 V3,没有更新。
结果:
- V1: 最短路径长度 14,路径 V6→V5→V1
- V2: 最短路径长度 6,路径 V6→V2
- V3: 最短路径长度 26,路径 V6→V2→V3
- V4: 最短路径长度 15,路径 V6→V4
- V5: 最短路径长度 10,路径 V6→V5
- 这些步骤和结果提供了从V6到图中所有其他顶点的最短路径和长度。
问题3:
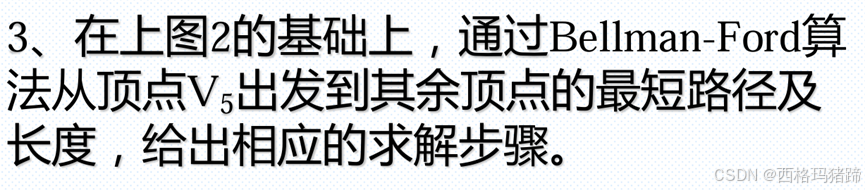
Bellman-Ford算法是一种用于寻找图中所有顶点对之间最短路径的算法,特别是当图中可能存在负权重边时。以下是使用Bellman-Ford算法从顶点 V5出发到其余顶点的最短路径及长度的求解步骤:
初始化:
- 设置 V5到自身的最短距离为0,即 dist[V5]=0
- 对于所有其他顶点Vi,初始化dist[Vi]为无穷大(或一个非常大的数)。
- 创建一个布尔数组visited来跟踪每个顶点是否已经被更新过。
迭代过程:
重复以下步骤 V−1次,其中 V是顶点的数量:
对于每条边(u,v),如果dist[u]+weight(u,v)<dist[v],则更新dist[v]为 dist[u]+weight(u,v)。
检测负权重循环:
在 V−1次迭代后,再次检查所有边。如果仍然可以更新 dist[v],则图中存在负权重循环。
应用到给定的图:
从 V5 开始,我们有以下边和权重:
- V5到V1: 4
- V5到V3: 30
- V5到V6: 10
步骤 1:初始化:
- dist[V5]=0
- dist[V1]=∞
- dist[V2]=∞
- dist[V3]=∞
- dist[V4]=∞
- dist[V6]=∞
步骤 2: 迭代过程:
- 第一次迭代:
- 更新dist[V1]=4 (通过V5
- 更新dist[V3]=34 (通过V5)
- 更新dist[V6]=10 (通过V5)
- 第二次迭代:
- 更新dist[V2]=14 (通过V6和边V6到V2的权重 6)
- 更新dist[V3]=19 (通过V1和边V1到V3的权重 15)
- 第三次迭代:
- 更新dist[V2]=13 (通过V3和边V3到V2的权重 20)
- 第四次迭代:
- 没有更新
结果:
- V1: 最短路径长度 4,路径 V5→V1
- V2: 最短路径长度 13,路径 V5→V3→V2
- V3: 最短路径长度 19,路径 V5→V1→V3
- V4: 最短路径长度 ∞,因为没有从 V5到 V4的路径
- V6: 最短路径长度 10,路径 V5→V6
这些步骤和结果提供了从V5到图中所有其他顶点的最短路径和长度。请注意,如果图中存在负权重循环,Bellman-Ford算法能够检测到这一点,但在本例中没有负权重循环。
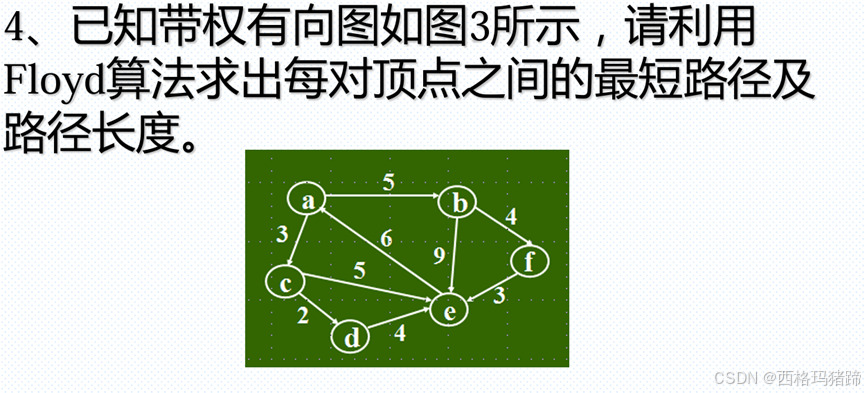
问题4:
初始化:
- 创建一个距离矩阵 dist,其中 dist[i][j] 表示顶点 i 到顶点 j 的直接距离。如果 i 和 j 之间没有直接的边,那么 dist[i][j] 应该是无穷大(或一个非常大的数)。
- 创建一个前驱节点矩阵 next,用于记录路径。如果 i 到 j 有直接的边,那么 next[i][j] 就是 j;如果没有直接的边或者 i 等于 j,那么 next[i][j] 就是 null 或 i。
迭代过程:
对于每一个顶点 k:
- 更新所有顶点对 (i, j) 的距离和前驱节点:
- 如果 dist[i][k] + dist[k][j] < dist[i][j],则更新 dist[i][j] 为 dist[i][k] + dist[k][j]。
- 同时更新 next[i][j] 为 next[i][k]。
应用到给定的图:
根据图中的边和权重,初始化距离矩阵和前驱节点矩阵:
dist = {
{0, 5, 3, ∞, 6, ∞},
{∞, 0, ∞, 9, ∞, 4},
{∞, ∞, 0, 2, 5, ∞},
{∞, ∞, ∞, 0, 4, ∞},
{∞, ∞, ∞, ∞, 0, 3},
{∞, ∞, ∞, ∞, ∞, 0}
}
next = {
{a, b, c, null, e, null},
{null, b, null, e, null, f},
{null, null, c, d, e, null},
{null, null, null, d, null, null},
{null, null, null, null, e, f},
{null, null, null, null, null, f}
}
迭代更新:
对于每一个顶点 k,更新 dist 和 next。这里我们只展示更新后的距离矩阵,因为前驱节点矩阵的更新过程类似,但更复杂。
- 更新 k=a:
- 没有变化,因为 a 到其他顶点的直接距离已经是最短的。
- 更新 k=b:
- dist[c][f] 更新为 dist[c][b] + dist[b][f] = 3 + 4 = 7。
- 更新 k=c:
- dist[a][d] 更新为 dist[a][c] + dist[c][d] = 3 + 2 = 5。
- dist[b][d] 更新为 dist[b][c] + dist[c][d] = ∞ + 2 = 2(因为 b 到 c 没有直接边,所以这个更新不会发生)。
- 更新 k=d:
- dist[a][e] 更新为 dist[a][d] + dist[d][e] = 5 + 4 = 9。
- 更新 k=e:
- dist[b][e] 更新为 dist[b][e] = 9(更新为直接距离)。
- dist[c][e] 更新为 dist[c][e] = 5(更新为直接距离)。
- 更新 k=f:
- 没有变化,因为 f 到其他顶点的直接距离已经是最短的。
结果:
最终的距离矩阵 dist 将包含所有顶点对之间的最短路径长度。前驱节点矩阵 next 可以用于重建最短路径。

















 6388
6388

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









