




 在ICCV2019上,Jiwoong Choi等人提出了Gaussian_YOLOv3,该模型在YOLOv3的基础上引入了边框不确定性评分,通过高斯模型回归边框,显著提升了检测精度。网络采用3个尺度的Featuremap,每个尺度分配3个由K均值产生的anchor,增强了模型的检测能力。
在ICCV2019上,Jiwoong Choi等人提出了Gaussian_YOLOv3,该模型在YOLOv3的基础上引入了边框不确定性评分,通过高斯模型回归边框,显著提升了检测精度。网络采用3个尺度的Featuremap,每个尺度分配3个由K均值产生的anchor,增强了模型的检测能力。
深度学习系列之Gaussian_YOLOv3 个人总结
https://github.com/jwchoi384/Gaussian_YOLOv3
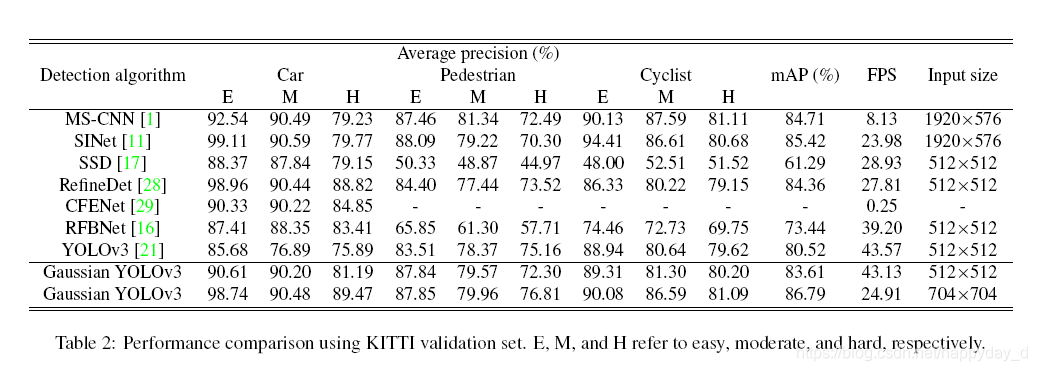
ICCV 2019会议上 Jiwoong Choi等人在YOLOV3的基础上进行修改得到了Gaussian YOLOv3网络结构,该网络结构的mAP比YOLOv3(512x512)高3个点。
创新点
作者认为在常规的Single Stage目标检测网络中,分数和边框都是单独回归的,而边框回归的不确定性是没有判断的,因此引入了对边框的不确定分数,最后在yolov3的分数基础上乘以(1-不确定性分数),得到总分。采用了高斯模型来回规边框。
方法
利用高斯模型:
p
(
y
∣
x
)
=
N
(
y
;
μ
(
x
)
,
Σ
(
x
)
)
p(y | x)=N(y ; \mu(x), \Sigma(x))
p(y∣x)=N(y;μ(x),Σ(x))
网络模型结构为:
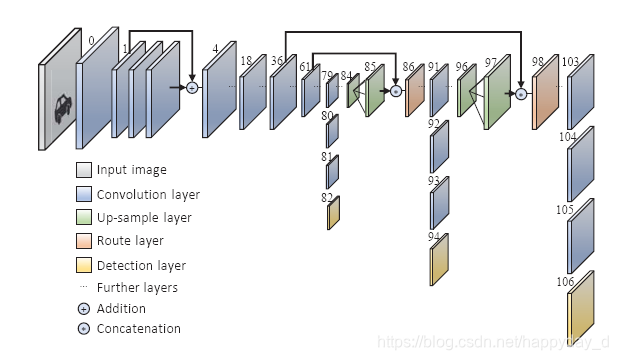
使用3个尺度的Feature map用于目标检测输出,如下图
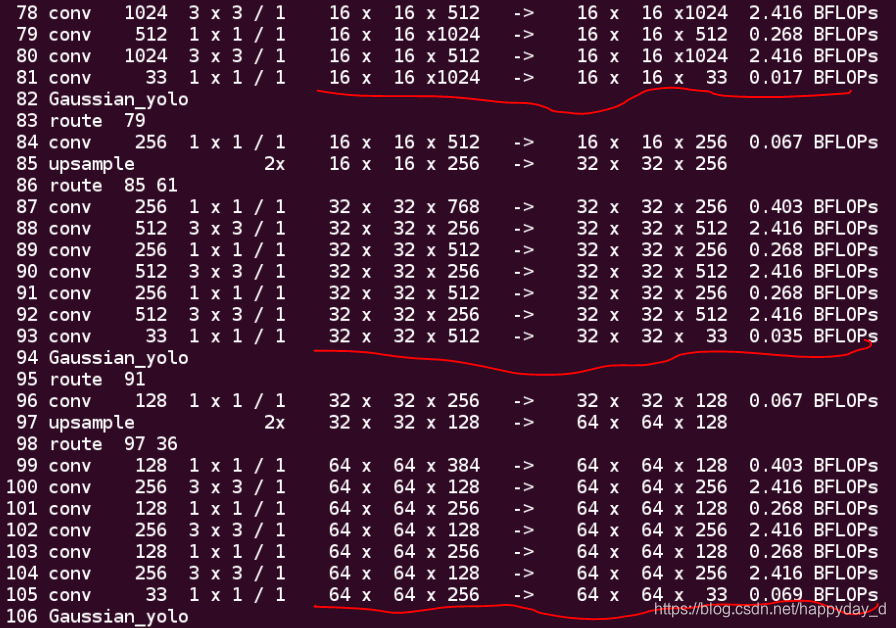
如上图,在每个detection前,尺度都不同(16x16,32x32,64x64)。这里用到了上采样。(可以提供更多的语义信息和细粒度特征)。
在Gaussian YOLOv3中,我们的anchor是9个,是由K均值产生的,每个尺度分配3个anchor。其中每个尺度下每个位置预测3个bbox(8个位置输出+1个objectness+C个类别的分数)。所以每个位置输出**(1+8+C)*3**个值,这也就是训练时.cfg里的filter的数量。默认anchor是利用k-means聚类得到,可参考【Yolov2、Yolov3、Gaussian_Yolov3使用K-means聚类计算anchor boxes方法】
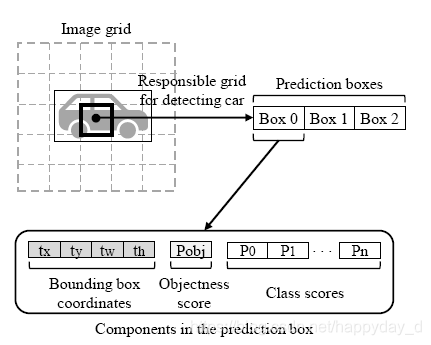
YOLOv3中.cfg中 filter输出为:3x(1+4+C),C表示类别数
边框输出部分变为:
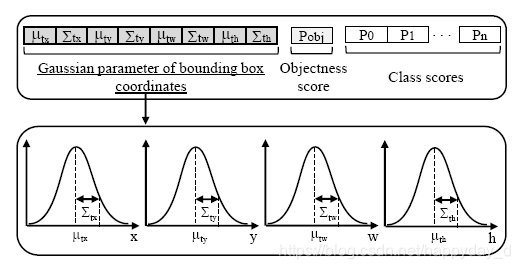
其中u()为边框的坐标,∑为各坐标的不确定性 。
YOLOv3的边框输出为:
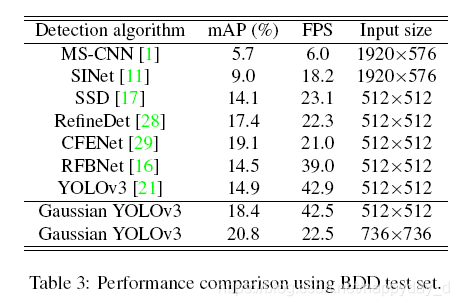
实验结果
实验问题
- 利用作者提供的代码运行 python文件夹下的darknet.py,出现了
“Segmentation fault”的问题,解决方法可参考Gaussian Yolov3 Segmentation fault问题


















 2万+
2万+



 到【灌水乐园】发言
到【灌水乐园】发言







