






这篇文章仅仅针对的是软件下载部分,如果你遇到了本地端的控制器链接不上而显示辅助驾驶,又或者双击start和kill文件出现报错,又或者评分失败,又或者评分一直白屏或者转圈进不去,又或者一直在排队,又或者案例突然中断,又或者明明你的脚本文件就是存在的,但是你复制路径的时候,平台就是显示不存在,又或者出现Fail等的其他问题,可以参考我下一篇博客工程创新大赛智能网联汽车设计赛项经验帖——软件的debug篇
一、Cmake的下载
1、搜索网址Download CMake 可以找到Cmake的下载地址,然后下拉找到Older Release,也就是早一些的版本,然后点击kitware的链接,如果有魔法访问Github也是可以的,这里仅仅展示kitware里面的版本。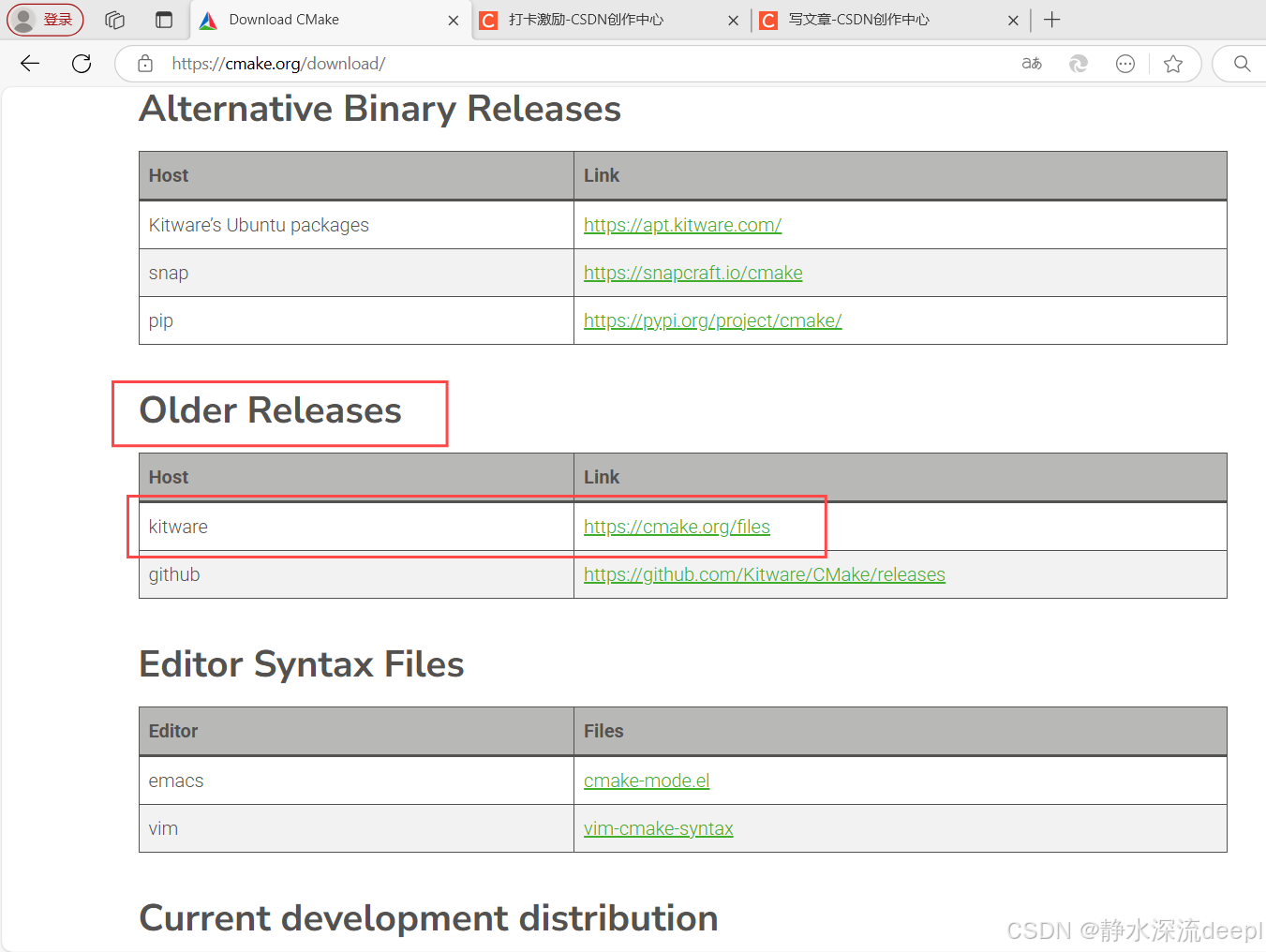
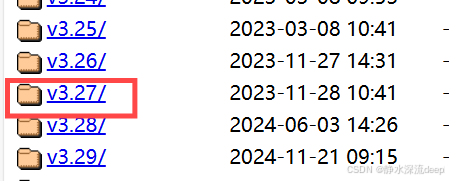
2、进入之后找到v3.27版本,点击进去。
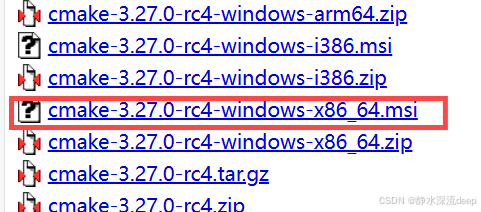
3、往下拉找到cmake-3.27.0-rc4-windows-x86_64.msi,需要注意的是不要下载错了,一定是rc4和.msi文件。由于不是国内的文件,所以一般下载都比较慢,需要等待较长的一段时间。
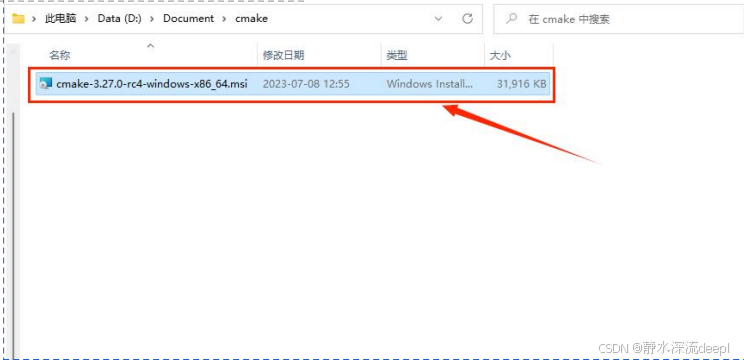
4、 下载完成后运行刚刚下载好的.msi文件
5、按照指导文档01进行一下的步骤,值得注意的是,一定要将Cmake添加到环境变量里去也就是勾选Add Cmake to the system path for all user,建议再在D盘创建一个新的文件夹将Cmake下载到D盘去,避免占用C盘空间。
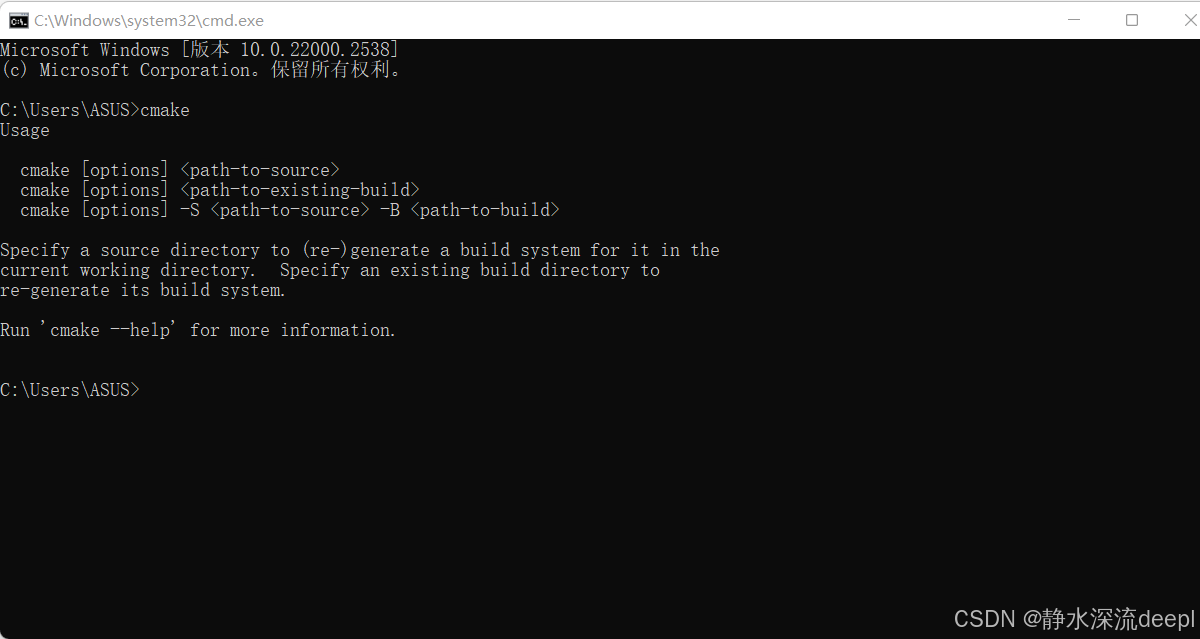
6、下载完毕后输入Win+r打开cmd控制台,在控制台里面输入cmake出现下面的内容即为下载成功,否则为下载失败,再次审视哪些步骤不一样,重新安装过即可。
二、Visual Studio2017的下载
官方推荐的Visual Studio为2017版本,实测不是2017版本也可以,不过需要改一写配置文件里的命令,后续在:四、非Visual Studio2017的解决方法中我会介绍。从官网下载的Visual Studio是Visual Studio Installer并不是真正的Visual Studio,所以下载好之后还要再选择安装C++桌面开发即可。Visual Studio网络上也有非常多的资源视频介绍如何下载,我这不做过多的描述。

三、NEVC-Simone的下载
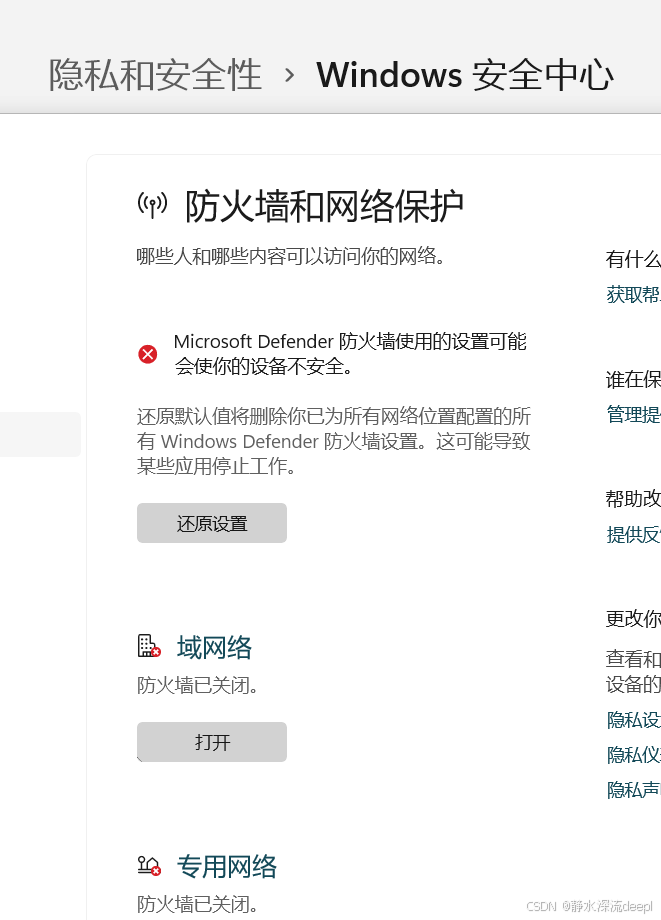
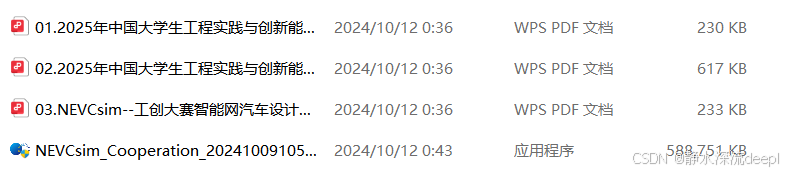
1、从竞赛官网下载好组委会发在网盘里面的压缩包,解压到本地端后打开文件,运行exe文件前需要把防火墙关闭,并且将所有的杀毒软件全部退出,有条件的最好卸载,避免软件下载时出现不必要的问题。
2、 解压后双击蓝色图标运行,正常下载安装即可
3、同样的在D盘新建一个文件夹,文件夹不要出现中文名称,将该软件下载到文件夹,等待安装完毕即可,第一次安装可能进度条会卡在100%比较长的时间,是正常现象,耐心等待即可。

4、然后不要立即打开文件,找到刚刚在D盘的文件,按照图示地址将app_config的json文件替换,替换文件在QQ的答疑群里有,如果没有这个文件的也可以私信找我要,我如果看到了都会回复。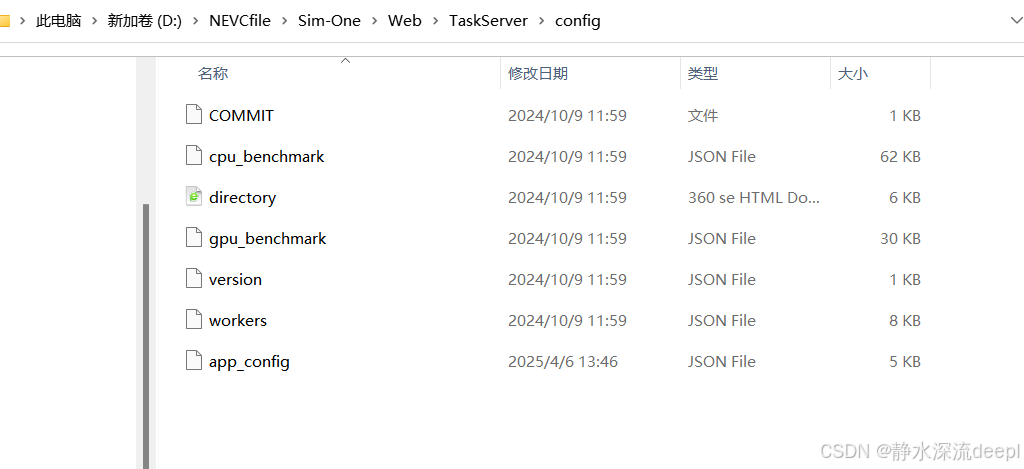
四、非Visual Studio2017的解决方法
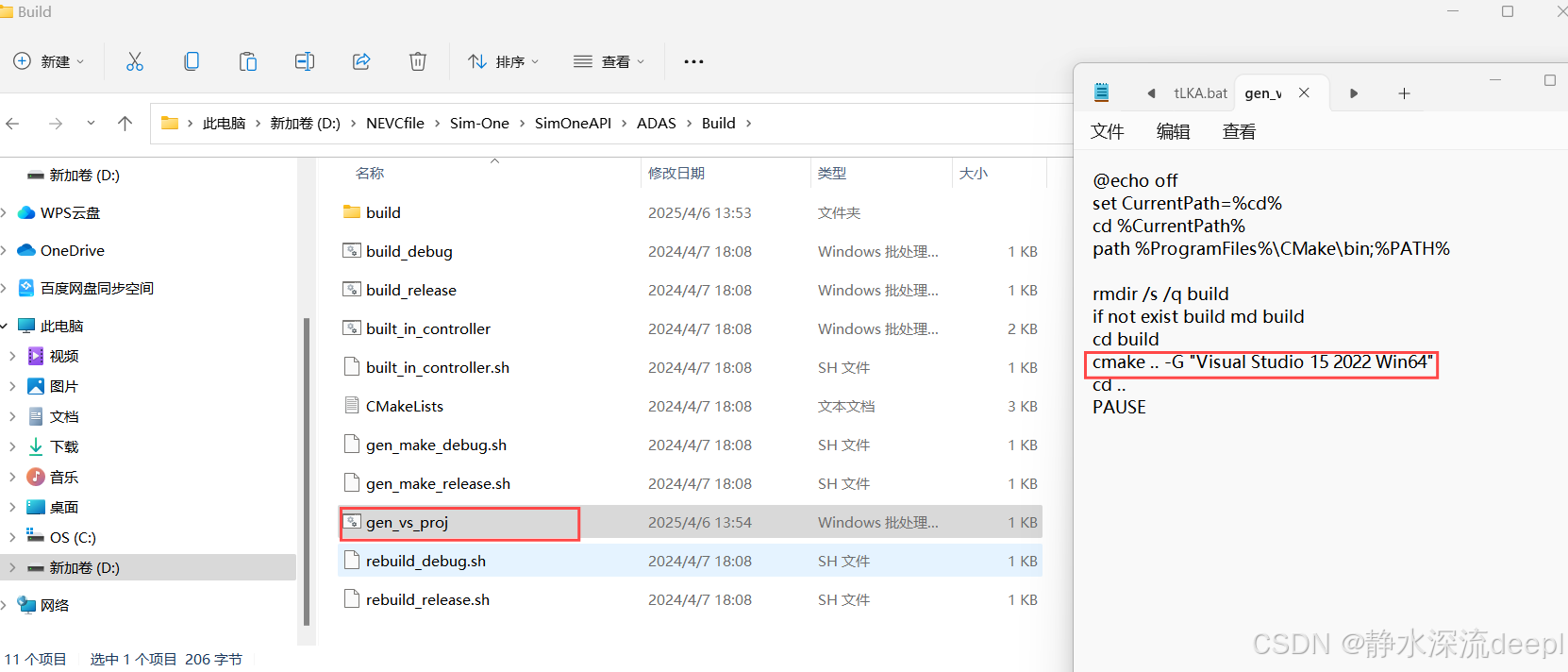
1、由于有许多同学之前就下载好了Visual Studio的其他版本,不想再次下载2017版本占用内存,这里也是有解决方法的,就是找到下图对应的目录下的gen_vs_prog,右击鼠标,然后点击在记事本中编辑,将2017修改为2022即可(你是哪个版本就修改成哪个版本就行,我是以2022来举例)然后保存记事本后双击gen_vs_prog。
2、不出意外的话还是会报错,这是由于还要改前面的数字,这一步只是为了方便不同Visual Studio版本的同学都能正常运行。将命令行滑到最上面,发现2022版本前面的数字是17而不是上图所示的15,因此要将15改成17,并且将后面的Win64一并删除。(每个版本的数字都不同,需要按照终端的输出对应自己的版本修改数字)。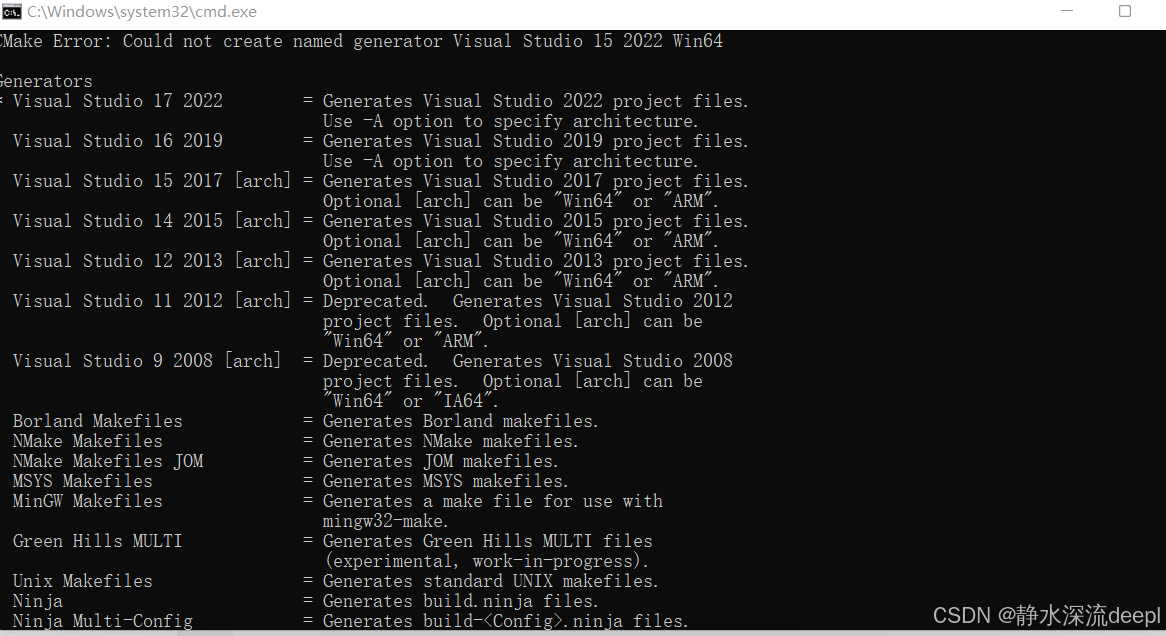
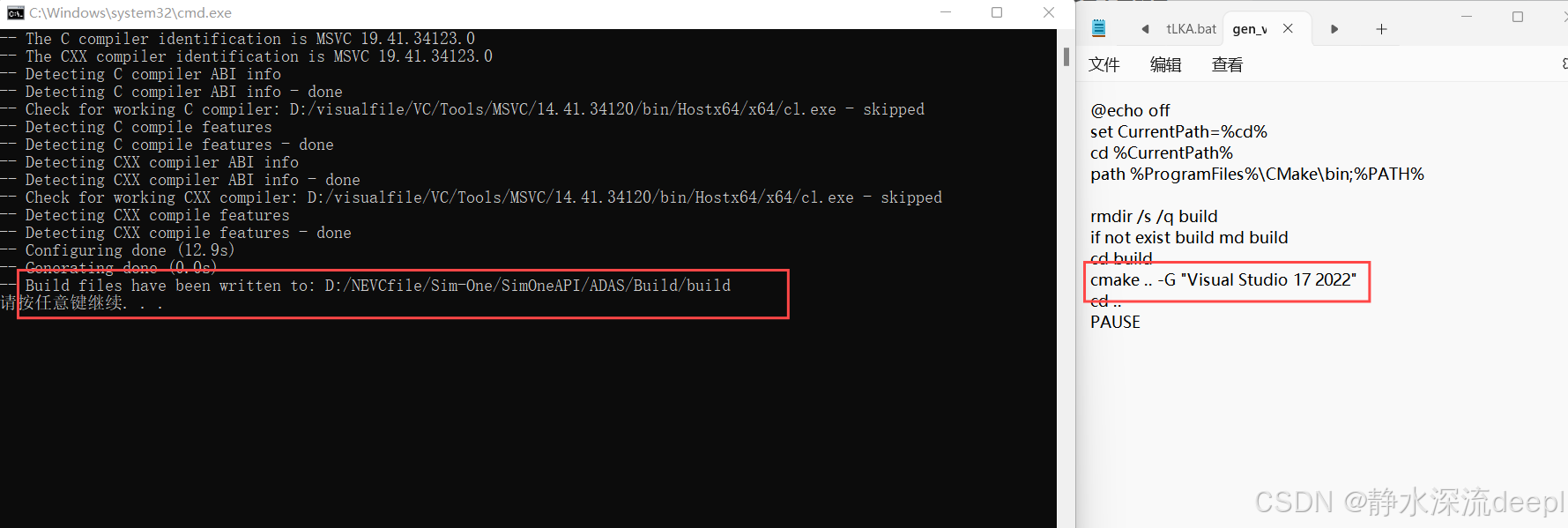
3、保存记事本文件后再次双击运行gen_vs_prog,不出意外的话终端出现下面的显示就意味着你已经成功build了文件。
五、生成Release文件
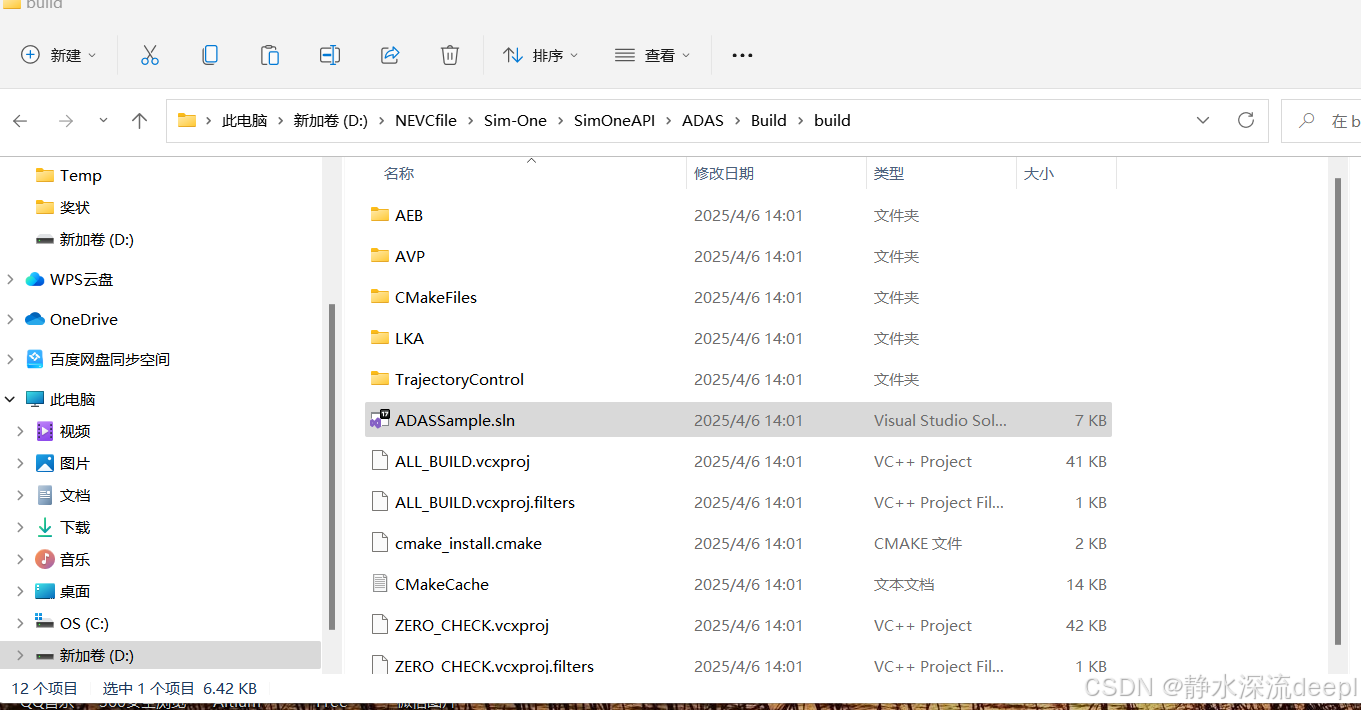
1、到现在为止你已经成功可以看到官方给的实例代码了,就在build文件目录里的ADASsample.sln文件里面,可以使用你的Visual Studio打开。
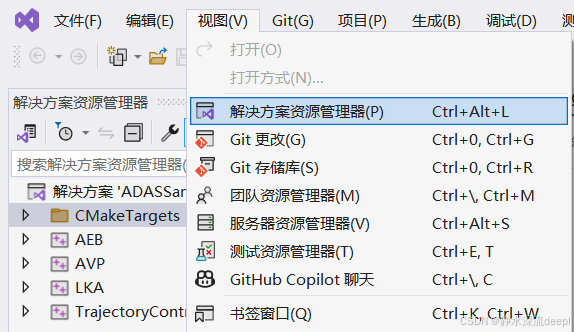
2、打开后可能并不会显示所有的案例目录,你可以在Visual Studio的视图,解决方案管理器打开目录。
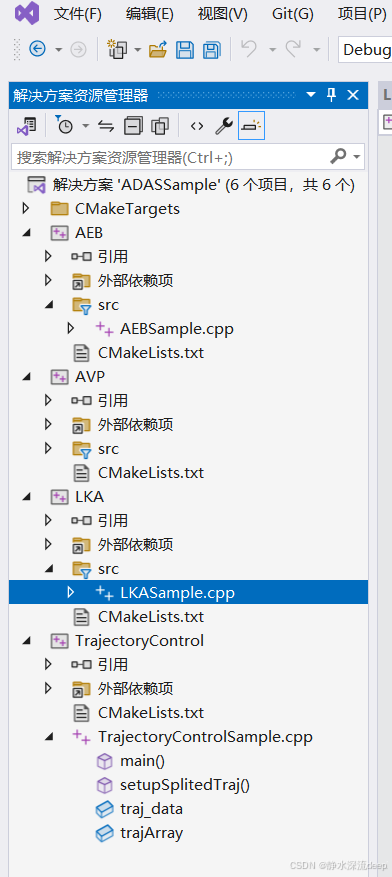
3、例如AEB,LKA,AVP的src里的sample文件都有官方给的示例代码,你可以在里面开发属于自己的功能
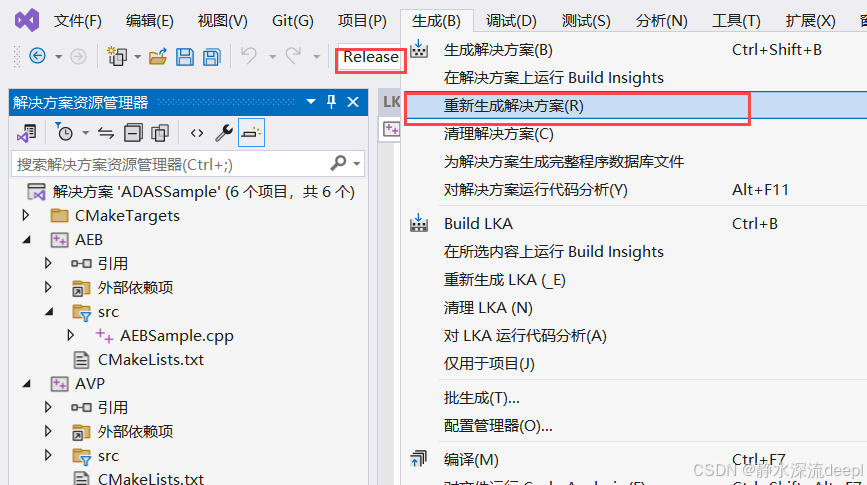
4、之后将debug改成release,然后点击重新生成解决方案即可,点击后看应该会出现========== 全部重新生成: 5 成功,0 失败,1 已跳过 ==========这样的提示就意味着你就会在bin/release的文件夹下面找到每个功能对应的.exe可执行文件,之后就可以自己设置启停脚本来控制本地端车辆的运动了。
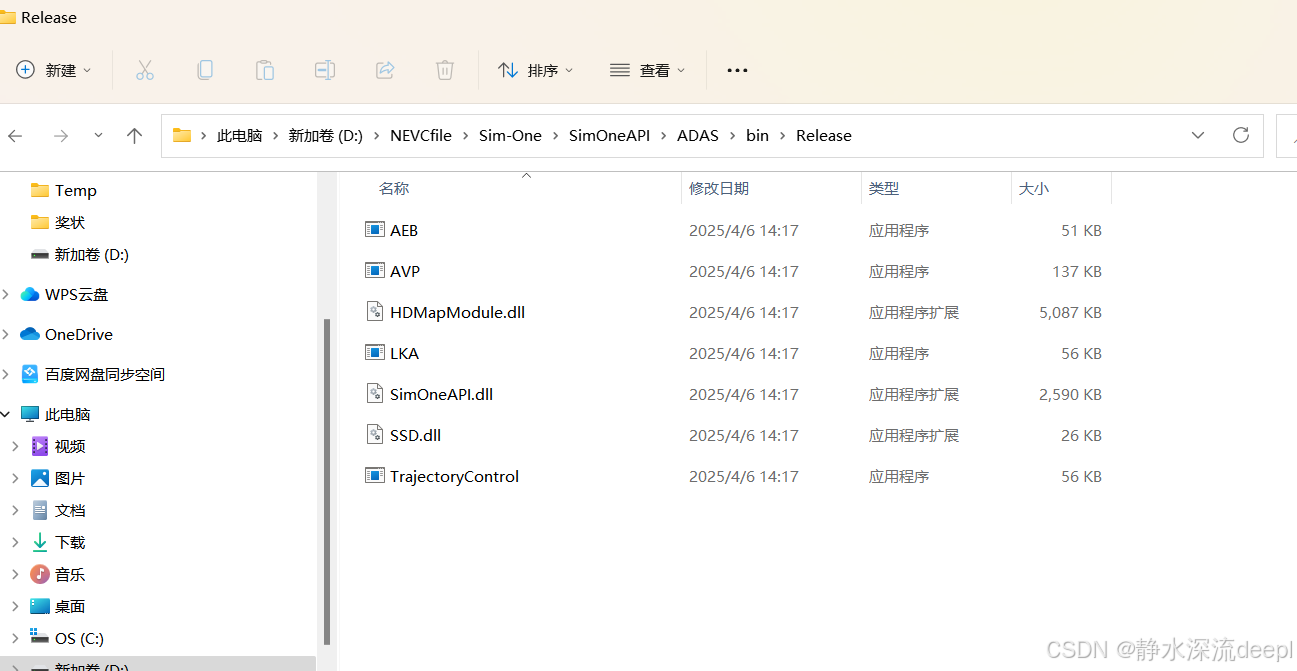
5、下图就是正常的生成后的文件,之后的启停脚本都写在这个文件下即可。
至此你已经完成了所有软件配置的模块,但是在配置过程中你可能会出现,本地端的控制器链接不上而显示辅助驾驶,又或者双击start和kill文件出现报错,有或者评分失败,又或者评分一直白屏或者转圈进不去,又或者一直在排队,又或者案例突然中断,又或者明明你的脚本文件就是存在的,但是你复制路径的时候,平台就是显示不存在,又或者出现Fail等的报错等等等等的其他问题,我在下一篇博客工程创新大赛智能网联汽车设计赛项经验帖——软件的debug篇会详细介绍。如果这篇博客有帮助到您,辛苦您点个关注与赞,后续我将会推出更高质量的文章,有任何其他问题也可以私信联系我。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









