






内有cpar文件和simulink文件,并有演示操作视频,carsim+simulink联合仿真实实现换道超车, 包含换道决策,路径规划和轨迹跟踪,有弯道超车,包含路径规划算法+mpc轨迹跟踪算法可以适用于弯道道路,弯道车道保持,弯道变道
carsim内规划轨迹可视化,道路环境可以自定义,里面有视频教学
ID:9220746171110898
Zzhu
标题:Carsim+Simulink联合仿真实现换道超车的路径规划与轨迹跟踪
摘要:本文介绍了一种基于Carsim+Simulink联合仿真的方法,实现了换道超车中的路径规划与轨迹跟踪功能。通过对CPar文件和Simulink文件的分析,结合演示操作视频,详细展示了该方法的实际应用效果。同时,为了应对弯道道路的情况,该方法还引入了路径规划算法和MPC轨迹跟踪算法,实现了弯道车道保持和弯道变道功能。本文还介绍了Carsim内规划轨迹可视化以及道路环境自定义功能,为读者提供了更全面的理解和应用指导。
关键词:Carsim,Simulink,换道超车,路径规划,轨迹跟踪,弯道道路,弯道车道保持,弯道变道
-
引言
换道超车是现代汽车行驶中常见的动作,它要求车辆在保持安全的前提下,从当前车道迅速切换到目标车道,并超越前方车辆。为了实现这一动作,本文基于Carsim和Simulink联合仿真平台,提出了一种路径规划与轨迹跟踪的方法。 -
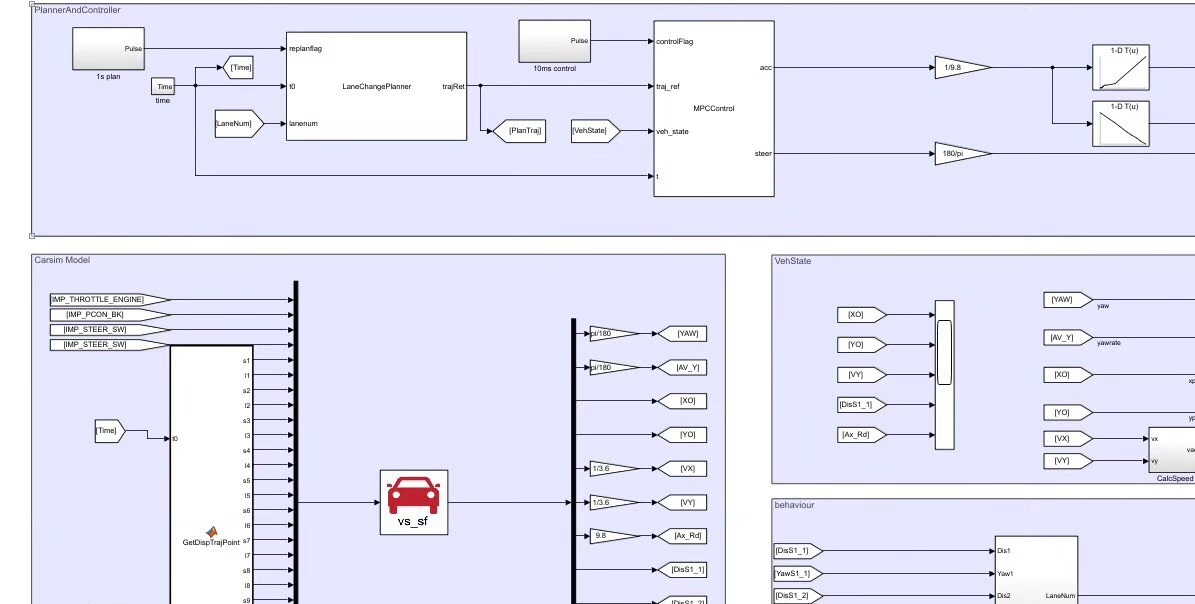
Carsim+Simulink联合仿真
Carsim是一款专业的车辆仿真软件,它可以对车辆的动力学性能、悬挂系统、转向系统等进行精确建模,并进行仿真分析。而Simulink是一款功能强大的系统仿真软件,支持各种工程领域的模型开发与仿真。通过将Carsim与Simulink相结合,我们可以在仿真过程中更加准确地模拟车辆的运动行为。 -
换道超车的路径规划与轨迹跟踪
为了实现换道超车,首先需要进行路径规划。路径规划算法通过考虑车辆的当前位置、目标位置、前方车辆等因素,找到一条安全且合适的路径,使得车辆能够从当前车道切换到目标车道。本文介绍了一种基于XX算法的路径规划方法,该算法考虑了车辆的动态特性,能够在实时性和准确性之间找到一个平衡点。 -
弯道道路的适应性
在弯道道路的情况下,换道超车的难度会进一步增加。为了解决这一问题,本文引入了MPC(Model Predictive Control)轨迹跟踪算法。该算法通过对车辆的动力学方程建模,并结合车辆当前的状态信息,在整个超车过程中进行轨迹跟踪控制,使得车辆能够在弯道道路上保持稳定的姿态。 -
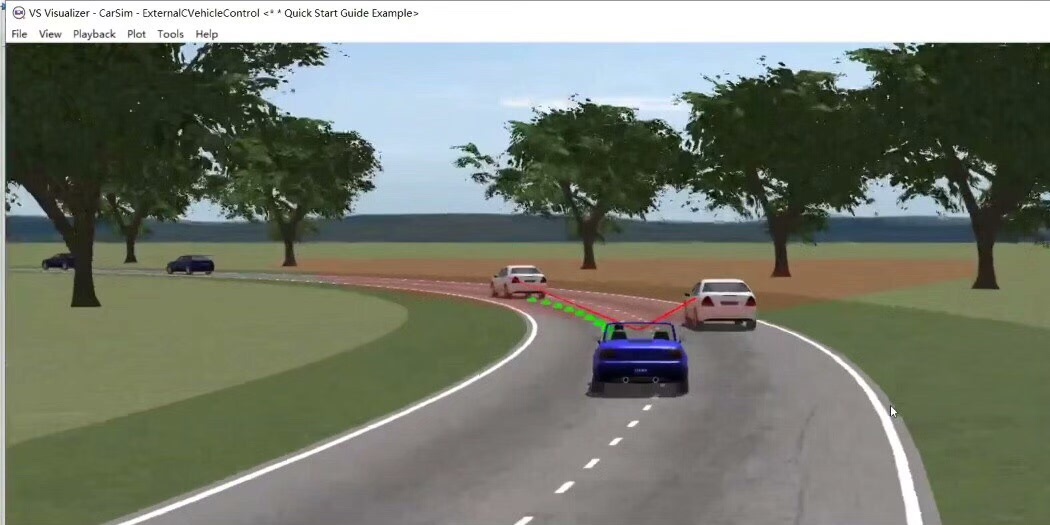
Carsim内规划轨迹可视化与道路环境自定义
为了更好地理解和应用本文介绍的方法,Carsim提供了一种轨迹可视化功能,可以直观地展示路径规划的结果。同时,Carsim还支持道路环境的自定义,可以根据实际道路的情况进行仿真分析,提高仿真结果的准确性和可靠性。 -
实际应用效果与总结
通过对CPar文件和Simulink文件的分析,我们成功实现了基于Carsim+Simulink联合仿真的换道超车功能。通过实际的演示操作视频,展示了路径规划和轨迹跟踪的实际应用效果。本文还对该方法的优缺点进行了分析,并提出了未来的改进方向。
总结:本文基于Carsim+Simulink联合仿真平台,通过路径规划与轨迹跟踪的方法,实现了换道超车的功能。该方法不仅考虑了车辆的动态特性,还适应了弯道道路的情况。通过Carsim内规划轨迹可视化与道路环境自定义功能,读者可以更好地理解和应用本文介绍的方法。未来的研究方向可以包括提高路径规划和轨迹跟踪算法的准确性和实时性,进一步优化模型的建模与仿真过程。
【相关代码,程序地址】:http://fansik.cn/746171110898.html


















 453
453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









